
新型蠕动式管道机器人设计
2015-02-09 08:08:50林潘忠王扬渝
江苏大学学报(自然科学版) 2015年5期
徐 洪,林潘忠,王扬渝
(1.浙江师范大学行知学院,浙江金华321004;2.温州职业技术学院机械工程系,浙江温州325035;3.浙江工业大学机械工程学院,浙江杭州310032)
新型蠕动式管道机器人设计
徐 洪1,林潘忠2,王扬渝3
(1.浙江师范大学行知学院,浙江金华321004;2.温州职业技术学院机械工程系,浙江温州325035;3.浙江工业大学机械工程学院,浙江杭州310032)
为提高管道机器人的自适应能力,运用自锁原理设计试制了一种新型蠕动式管道机器人.该机器人行进过程中,不需对管壁施加额外压力,就能适应水平、竖直、弯曲管道,并且对不同管径、不同截面的管道有一定的适应性.机器人的基本结构采用了伸缩式伞架机构,根据设计要求推导出其伸缩机构的受力情况和支撑机构与管壁的自锁原理;完成了支撑结构、联接机构的设计;建立了丝杆推力与平行四边形推动力的关系;并利用提出的设计方法制作了样机,并完成了样机试验.结果表明,该机器人牵引力大,自锁性能好,能够在内径为90~150 mm的管道中行进,并能够顺利通过弯道.研究结果可为管道机器人的设计提供参考.
机器人;管道;蠕动式;自锁;螺旋驱动
近年来,随着石油、天然气和其他流体运输管道的发展,定期对这些管道进行检测和维护,显得尤为重要[1].特别是2014年8月1日的台湾高雄燃气管道爆炸事件更是将人们的焦点引回到管道的安装与维护上来.管道自身的局限性,限制了人的操作能动性.微型管道机器人作为一种有效的检测工具载体,可以深入探测许多普通检测工具无法到达的狭小空间内,目前已成为解决管道检测这一工业难题的主要检测体,各种管道机器人也应运而生[2-5].由于管道内环境复杂、空间小,要求管道机器人单元结构简单,同时对复杂的管内环境具有自适应能力[6].
为了在管道内顺利行进,机器人应:①对管道的变化有一定的适应性;②能提供足够的牵引力;③动力系统、传动机构小型化.根据在管道内的行进方式,管道机器人主要可分为轮式、履带式、液力式、振动式、蠕动仿生式等.振动式适合用于刚性管壁环境;轮式驱动是管道机器人常用的移动载体,对于直管道,轮式机器人具有结构简单,速度快、牵引力大等优点;蠕动式以其结构紧凑、可微型化等优点,广泛应用于小口径管道的检测中[7].根据受力情况,蠕动式管道机器人的最大牵引力为行走机构与管壁之间的最大静摩擦力,若想增大系统牵引力,必须增大系统与管壁之间的压力;另一方面,随着压力增大,对系统的动力系统要求会变高,行进速度也会受到限制,因此解决系统牵引力与正压力之间的矛盾是设计关键[8-9].本次研究着眼于利用与管道的摩擦力实现机器人行进.
文中拟研制一种基于机构自锁原理的伸缩式管道机器人,以期对不同截面和口径的管道有一定的自适应性,并且能在水平、竖直、弯曲等形态的管道中行进.根据力学原理推导其伸缩机构的受力情况和支撑机构与管壁的自锁原理,并应用此理论研制伸缩式管道机器人样机,进行相关试验.
1 管道机器人的基本结构及其工作原理
图1为所设计管道机器人的结构.由图1可见,机器人共分3个部分,即前、后支撑结构和中间的伸缩结构.前、后支撑结构采用伞架结构,实现机器人对管壁的支撑与行进;中间伸缩结构采用平行四边形结构,在电机、丝杆的带动下实现伸缩,从而使机器人完成行进动作.机器人的3个部分之间用弹簧进行软性连接,使其不但能满足转弯的要求,而且转弯后能使机器人恢复到原始状态,有利于机器人的行进.
机器人向前运动的一个循环周期如图2所示.

图1 管道机器人整机结构

图2 管道机器人运动原理示意图
由图2可见,从中间的平行四边形处于伸长状态开始,机器人的行进的一个周期要完成如下6个动作:前支撑张开、后支撑收缩、平行四边形收缩、后支撑张开、前支撑收缩、平行四边形张开.应当指出,前后支撑的伸长与收缩,其动作副度的大小并不需图2所示大小,收缩的目的是减小支撑物与管壁之间的摩擦力.
2 管道机器人参数设计
2.1 支撑结构设计
支撑结构的设计主要要求有:①支撑结构与管壁之间应有足够的摩擦力,在平行机构伸缩时,能提供向前的推动力;②能进行手动和自动调整,以适应不同尺寸和截面的管道;③具有导向机构,即能在管壁的导引下通过转弯处[10].根据以上要求,设计了如图3所示的支撑结构.图3a所示为支撑基本形式:整体结构为伞架结构,上下2伞架支座间用丝杆联接.伞杆的顶端为能转动的一分支杆,如图3b所示;每个支撑杆上有2个支撑点,这样使被支撑的平面始终与管道的轴线垂直,不容易倾倒,如图3c所示.2个支撑点前端为一铝质小轮,与管壁纯滚动,起到导向轮的作用;后端为一橡胶球,可增加与管壁间的摩擦.
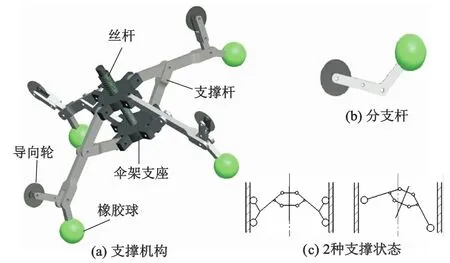
图3 管道机器人支撑结构
支撑机构的自锁作用:通过结构设计,使支撑机构具有自锁功能,其自锁原理如图4所示.

图4 支撑机构的自锁原理
在图4a示意的方向中,机构可灵活地向上运动,但不能向下运动.AC与中间轴用移动副联接,可上下移动;EF与中间轴用螺旋副联接,可手动调节EF与中间轴的相对位置.由于弹簧的作用,当管壁尺寸变大或变小时,杆EF固定,B,D点分别受到向外或向内的压力,使AB,CD各自分别绕中间点相应旋转,从而减小或增大AC与EF间的距离,弹簧力可将伞架撑开或收缩,直到支撑球与支撑轮均与管道内壁接触,截面直径自适应调节范围为90~150 mm,如图5所示.阻碍向下运动原理如图4b所示.

图5 支撑机构对截面的自适应功能
2.2 联接机构设计
通过上述结构设计,形成了机器人的基本模式,前后支撑与伸缩的联接成了关键问题.联接共有2处,即前支撑结构与伸缩结构的联接,伸缩机构与后支撑的联接.考虑到转弯的方便性,转弯中心应置于支撑结构附近,故在前后支撑结构处设置大自由度,而伸缩结构处用普通铰链联接.
由于机器人在管道内的行进过程中,转弯的朝向有不确定性,故联接方式应有较大的自由度,因此在前后支撑结构与伸缩机构间采用了弹簧联接方式,经过弯道后,机器人能自动恢复到中间状态,有利于机器人的行进.
伸缩机构与后支撑的联接如图6所示.

图6 后支撑与伸缩机构的联接方式
由图6a可见,该处联接一方面要求伸缩机构的平行四边形相对销轴能自由转动,另一方面由于图6a上方圆柱与后支撑结构已用弹簧联接,为了更好地发挥弹簧的恢复功能,应使这一圆柱的轴线与平行四边形的对角线重合,故需对这一联接的自由度进行限制,使它能保证平行四边形的自由运动,同时又能将弹簧的轴线始终与平行四边形的对角线重合.
为了实现自由度的控制,采用如图6b所示的“丁”字滑块结构.轴1为2根杆件的转动轴,销2、销3分别装在伸缩机构的2根杆上,当杆转动时,销轴1,2,3只能在滑块4的“丁”字槽内移动,而槽的形状使滑块4的轴线能始终与平行四边形的对角线重合.
3 设计计算
3.1 丝杆推力与平行四边形推动力的关系
为了有效缩短机构长度、缩短丝杆长度,采用了图7所示的不等边平行四边形机构.

图7 伸缩机构受力分析
由图7可见,此结构既保证了运动放大倍率,又可以提高传动效率.研究丝杆对C点的推力FC与机构中E点对支撑部分的推力FE之间的关系.
2)对于E点,由于各杆件对称,故N1=N′1,对于任意角度α时,有

3)对于BD杆,根据力矩的平衡,有

将式(2)代入式(1)得

由式(5)可见,四边形对支撑机构作用的力的大小,与丝杆的推力成正比,与BC杆长成正比,与BD杆长成反比,与平行四边形所处的角度无关.
3.2 电机功率与机器人推动力FE之间的关系
根据拟定的传动机构,可将电机到丝杆的传动表达为如图8所示的简图形式.

图8 电机传动简图
由图8可见,电机1通过自带的减速器将动力传到齿轮4,通过齿轮4-5的传动,传到丝杆2上,丝杆2带动螺母3,使回转运动变为直线运动.螺母3通过销轴将运动传到平行四边形结构,由平行四边形带动机器人运动.
设电机的输出功率为P,转速为n.
1)丝杆的输入功率P0为

2)丝杆为M6的螺杆,牙型属于三角形螺纹,当量摩擦系数fv为

式中β为普通三角形螺纹的牙型半角.
一方面,促进了学生的全面发展。由于多媒体课件为学生提供了大量的化学资源,例如,燃料电池在航天科技中的应用、高能电池在手机中的应用等,这些化学资源具有一定的时代特征。通过学习,学生能够开阔视野、拓宽思维,促进其全面发展。另一方面,提高了教师的业务水平。教师在研制大学普通化学多媒体课件时,不仅要掌握更多的计算机知识,还要了解更多的前沿信息,这就需要教师不断学习与钻研,无形中就会提高自身的业务水平。
当量摩擦角为

3)受到外载荷FC时,丝杆转动所需的最大扭矩为

式中α为螺纹的升角.
4)丝杆扭矩与丝杆输入功率间的关系为

根据式(5)-(6),(9),可得电机功率与机器人所受的推力之间的关系为

齿轮4,5采用直齿圆柱齿轮,其效率η取0.9;丝杆的中径d2=5.355 mm;升角α=3°24′17″;牙形半角β=30°;处于临界润滑状态,取f=0.1;平行四边形机构中,LBD=15 mm,LBC=63 mm;电机输出功率为P= 2.4W,转速n=420 r·min-1,代入式(11)得

4 试验验证
根据上述理论及计算的相应参数,制作了相应的管道机器人样机.其质量仅为0.4 kg,最大负载为17.4 N,可适应管径90~150 mm的管道结构,图9为管道机器人测试图.
图9a为其负载测试,铁块质量为1.5 kg,表明样机具有良好的自锁性能.图9b为机器人的管道通过能力测试,通过控制丝杆的运动,试验样机在2 m长的直管两端之间往复行走4次,测得其在直管中的平均速度为2.7 m·min-1.

图9 管道机器人测试

表1 不同负载下管道机器人的功率测试
分析上述结果可知,空载时输出功率P主要是为了克服机器人与管壁间的摩擦,摩擦阻力为18 N左右,摩擦阻力随着载荷的增大而增大.竖直向上时机器人所需的功率最大,机器人的最大外载荷为17.4 N,达到自重的4倍.
5 结 论
1)设计制作的蠕动式管道机器人不需对管壁施加额外压力,能适应水平、竖直、弯曲等管道,自锁性能良好.
2)管道机器人具有自动调节功能,能适应方形、圆形、矩形截面管道,可适应管道内径为90~150mm.
3)采用合理的联接方式,利用管壁的约束作用,使机器人能顺利通过近90°直角弯曲管道.
4)伸缩机构采用非等边平行四边形,有效地缩短了传动丝杆的长度,保证了运动放大倍率,机器人在管道中的运行速度可达2.7 m·min-1.
(
)
[1]李 鹏,马书根,李 斌,等.具有自适应能力管道机器人的设计与运动分析[J].机械工程学报,2009,45(1):154-161. Li Peng,Ma Shugen,Li Bin,et al.Design and motion analysis of an in-pipe robot with adaptability to pipe diameters[J].Journal of Mechanical Engineering,2009,45(1):154-161.(in Chinese)
[2]Liu Qingyou,Chen Yonghua,Ren Tao,et al.Optimized inchworm motion planning for a novel in-pipe robot[J]. Journal of Mechanical Engineering Science,2014,228(7):1248-1258.
[3]Schempf H,Mutschler E,Gavaert A,et al.Visual and nondestructive evaluation inspection of live gas mains using the ExplorerTMfamily of pipe robots[J].Journal of Field Robotics,2010,27(3):217-249.
[4]熊俊涛,邹湘军,陈丽娟,等.荔枝采摘机械手果实识别与定位技术[J].江苏大学学报:自然科学版,2012,33(1):1-5. Xiong Juntao,Zou Xiangjun,Chen Lijuan,et al.Fruit recognition and positioning technology of litchi picking manipulator[J].Journal of Jiangsu University:Natural Science Edition,2012,33(1):1-5.(in Chinese)
[5]Li Peng,Ma Shugen,Li Bin,et al.Self-rescuemechanism for screw drive in-pipe robots[C]∥Proceedings of the 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems.Taipei:IEEE Computer Society,2010:2843-2849.
[6]Qiao Jinwei,Shang Jianzhong,Goldenberg Andrew.Development of inchworm in-pipe robot based on self-locking mechanism[J].IEEE/ASME Transactions on Mechatronics,2013,18(2):799-806.
[7]张延恒,逄增辉.一种蠕动式管道机器人的设计[J].机械设计与制造,2010(4):13-15. Zhang Yanheng,Pang Zenghui.Design of a novel crawling pipe robot[J].Machinery Design&Manufacture,2010(4):13-15.(in Chinese)
[8]Nakazato Y,Sonobe Y,Toyama S.Development of an inpipemicro mobile robot using peristalsis motion[J]. Journal of Mechanical Science and Technology,2010,24(1):51-54.
[9]乔晋崴,尚建忠,陈 循,等.基于凸轮自锁原理的伸缩式管道机器人设计[J].机械工程学报,2010,46(11):83-88. Qiao Jinwei,Shang Jianzhong,Chen Xun,et al.Development of an inchworm in-pipe robot based on the cam self-locked principle[J].Journal of Mechanical Engineering,2010,46(11):83-88.(in Chinese)
[10]Jeon W,Kim I,Park J,et al.Design and controlmethod for a high-mobility in-pipe robot with flexible links[J]. Industrial Robot:An International Journal,2013,40(3):261-274.
(责任编辑 梁家峰)
Design of a new type crawling in-pipe robot
Xu Hong1,Lin Panzhong2,Wang Yangyu3
(1.Xingzhi College,Zhejiang Normal University,Jinhua,Zhejiang 321004,China;2.Department of Mechanical Engineering,Wenzhou Vocational&Technical College,Wenzhou,Zhejiang325035,China;3.College of Mechanical Engineering,Zhejiang University of Technology,Hangzhou,Zhejiang310032,China)
Based on the self-locking principle,a new type of crawling pipeline robot was designed and made to improve the adaptive ability of in-pipe robot.Without additional pressure,the robot was adaptable to pipe diameter and section with horizontal,vertical and bending pipe in moving process.A telescopic umbrella standmechanism was adopted in the robot,and the force of telescopicmechanism and the principle of self-locking were deduced based on design requirements.The design of support structure and telescopic mechanism was completed,and the relationship of screw thrust and parallelogram driving force was established.A prototype was developed based on the theoretical foundations,and the experiments of prototypewere completed.The results show that the robot traction,self-locking ability and cornering characteristics are in good performance,and the robot can accommodate 90~150 mm inner diameter of pipe.The results provide a reference for the in-pipe robot design.
robot;pipe;crawling;self-locking;screw-driving
TP242.3
A
1671-7775(2015)05-0561-05
徐 洪,林潘忠,王扬渝.新型蠕动式管道机器人设计[J].江苏大学学报:自然科学版,2015,36(5):561-565.
10.3969/j.issn.1671-7775.2015.05.012
2014-11-21
浙江省科技厅公益性技术应用研究计划项目(2013C31024);黑龙江省高校重点实验室开放基金资助项目(2012DJ-002)
徐 洪(1968—),男,浙江金华人,副教授(xuh@zjnu.cn),主要从事机械结构设计、机器人控制技术等研究.
林潘忠(1989—),男,浙江温州人,硕士(通信作者,linpanzhong@163.com),主要从事机械结构动态优化、非标准设备设计等研究.
猜你喜欢
中国设备工程(2024年9期)2024-05-13 06:05:08
橡塑技术与装备(2022年10期)2022-10-03 07:39:14
橡塑技术与装备(2021年2期)2021-02-01 03:36:18
小学生学习指导(中年级)(2020年12期)2021-01-08 02:50:08
中学生数理化·七年级数学人教版(2019年4期)2019-05-20 10:03:54
中学生数理化·七年级数学人教版(2019年4期)2019-05-20 10:03:46
中学生数理化·七年级数学人教版(2019年4期)2019-05-20 10:03:42
计算机测量与控制(2017年6期)2017-07-01 16:23:56
中国塑料(2016年12期)2016-06-15 20:30:07
中国塑料(2015年12期)2015-10-16 00:57:22
