大面阵影像在带状测区中的控制点需求分析
2015-02-07 07:44汪建峰
地理空间信息 2015年4期
汪建峰,韩 涛,周 勃
(1.西安测绘总站,陕西 西安 710054;2.地理信息工程国家重点实验室,陕西 西安710054)
大面阵影像在带状测区中的控制点需求分析
汪建峰1,2,韩 涛1,2,周 勃1
(1.西安测绘总站,陕西 西安 710054;2.地理信息工程国家重点实验室,陕西 西安710054)

介绍了大面阵数码影像的优势,结合实验,对不同控制点分布状态下的精度进行统计和分析,总结了大面阵影像在带状不规则区域的控制点布设规律,为相关测绘工程应用提供了技术依据。
大面阵影像;带状区域;控制点
1 大面阵数码影像特点
UCXp WA数码航摄仪是Microsoft Vexcel公司新推出的一款短焦距广角数字航摄仪。采用特制的全新高性能、高分辨率、专业测量级广角短焦镜头,是目前影像幅面最大、效率最高、分辨率最高、基高比最高的主流专业数字航摄仪[1]。其全色波段镜头焦距缩短至70 mm;全色波段影像尺寸17 310像素×11 310像素;全色波段像素大小为6 μm;实际物理幅面104 mm×68 mm。彩色(多光谱)4个通道,R、G、B和近红外,彩色波段影像尺寸 5 770像素×3 770像素,彩色影像像素大小6 μm。相同飞行条件下可以覆盖更大的范围,有效减少航线数,节约大量飞行时间,显著提高飞行效率。同等航高条件下,UCXP影像与目前主流航摄影像覆盖面积关系如图1所示。
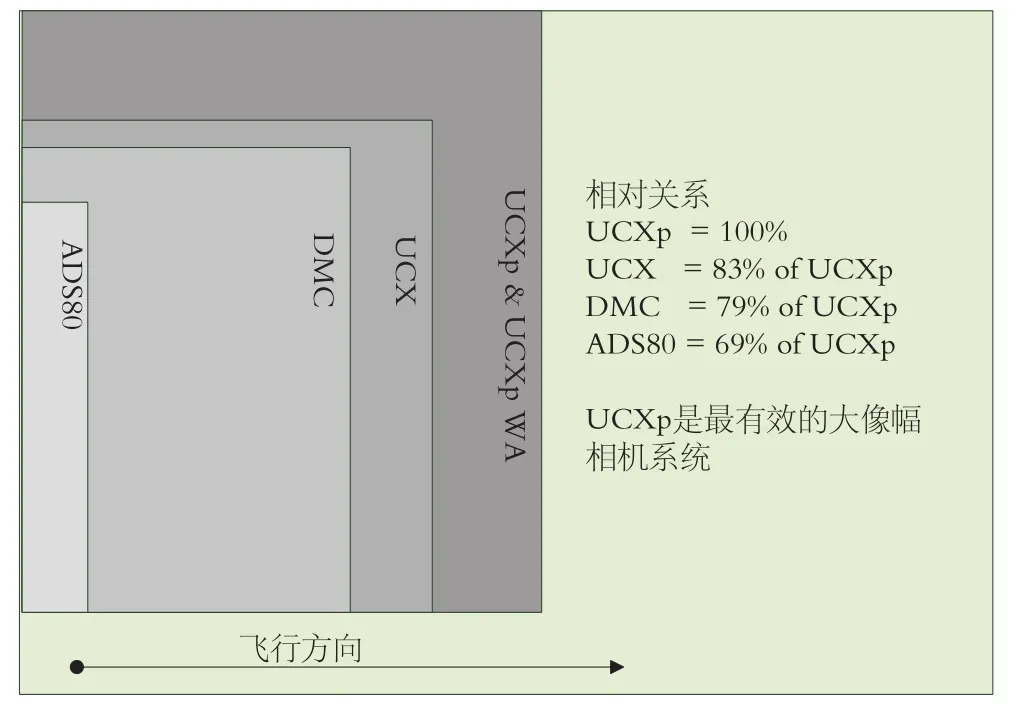
图1 同样航高摄影条件下不同相机航摄覆盖面积对比
2 带状测区选择
2.1 航摄资料
测区全段采用UCXP WA数码航摄仪,每张影像均获取相应的POS数据,利用POS数据恢复立体模型,部分模型在放大至作业环境下(1∶1)有1~2个像素。用控制点检核其精度,较差在0~4 m之间;相邻模型公共点较差在-5~5 m之间。从指标来看,利用原始POS数据恢复立体模型并不能满足1∶10 000比例尺成图精度要求[2]。
该项目飞行航高为6 500~7 250 m,地面分辨率为0.55 m,1∶10 000比例尺是该规格分辨率成图的最高要求[3];航线总长度266 km,共计16条航线,359景影像。测区航线分布见图2。
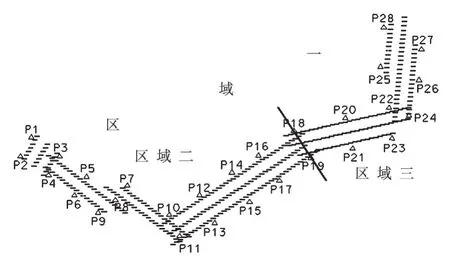
图2 测区概况图
2.2 像控点布设
测区实测外业点28个,在交叉航线的拐点、航线内部、航线之间均布设一定数量控制点,沿测区走向基本均匀分布。为使成果具有可比性,在各方案平差情况下,使用相同的9个外业点作为检查点进行精度统计(P4、P5、P8、P12、P15、P16、P21、P25、P26),其他19个点作为控制点进行组合,按各方案制定的不同控制分布进行定向。测区控制点布设情况见图2。
3 区域划分及实验方案设计
将测区分成3个区域进行空中三角测量,区域一是将16条航线作为整个区域进行实验,以区域一较长平行航线东侧分割,西侧为区域二,东侧为区域三(图 2)。重点实验不同控制点布设情况下的成果精度及定位能力[4,5],探索大面阵影像在带状测区测绘中控制点布设的最佳方案。
采用以下6种方案进行实验:
方案1:将除检查点外的19个外业点位全部作为定向点,进行区域网平差,统计分析检查点精度。检查这些点位是否满足基本实验要求。
方案2:将所有交叉航线处14个外业点(P1、P2、P3、P7、P9、P10、P11、P18、P19、P22、P23、P24、P27、P28)作为定向点,进行区域网平差,统计分析检查点精度,检查航线内部不布设控制点情况下成果精度的变化规律。
方案3:利用航带中间6个外业点(P6、P13、P14、P17、P20、P27)作为定向点,进行区域网平差,统计分析检查点精度,检查航线交叉不布设控制点情况下成果精度的变化规律。
方案4:将测区外接多边形上的10个外业点(P1、P2、P9、P11、P18、P19、P23、P24、P27、P28)作为定向点,进行区域网平差,统计分析检查点精度,检查控制点构网对成果精度影响的规律。
方案5:将交叉航线的内外拐角及航线中间16个外业点(P1、P2、P6、P7、P9、P10、P11、P14、P18、P19、P20、P22、P23、P24、P27、P28)作为定向点,进行区域网平差,统计分析检查点精度。
方案6:在方案5基础上,将P14分别替换为P13、P17,其他点位不变,进行区域网平差,统计分析检查点精度,检查定向点有效控制范围的变化规律。
4 数据准备与处理
4.1 数据准备
数据准备主要包括建立测区目录;建立测区信息、像机信息、控制信息数据(含POS数据)文件;影像数据准备;POS数据、控制数据坐标系统一致性检查,数据格式准备;测区航线略图绘制等。其中POS数据应注意:①Kappa角必须是以正东方向为起算角,即正东为0°,正北为90°;②转角系统必须是“Omega、Phi、Kappa”;③角度必须以°为单位。
在全数字摄影测量工作站中建立工程,选择正确的坐标系统,加载原始影像文件、内方位元素参数、POS数据等,进行数据导入,同时制作金字塔影像。
4.2 内业点选取及相对定向
将单条航线影像按3×3选点策略进行自动选点,得到每张像片的标准点位及其所包含的多度重叠影像号,对所选点位进行全人工量测和编辑,确保点位量测准确。对已量测好的相邻平行航线影像合区,进行人工转点。对转好点的区域数据进行粗差探测及自由网平差解算,完成相对定向。
4.3 控制点判刺及绝对定向
将相邻平行航线组成的小区判刺控制点,并进行初步平差解算,剔除并改正粗差点位,进行初步绝对定向。
对平行航线组成的各区在航线交叉处转判连接点和控制点,进行平差解算,分析点位精度,对不合理点位进行修改和检核,再次进行平差解算,完成各区绝对定向。
5 精度统计与分析
在立体环境下读取检查点模型坐标值,并与外业值进行比较,求得检查点余差并统计中误差,检查空三成果的整体精度。各方案检查点余差中误差情况如表1所示。
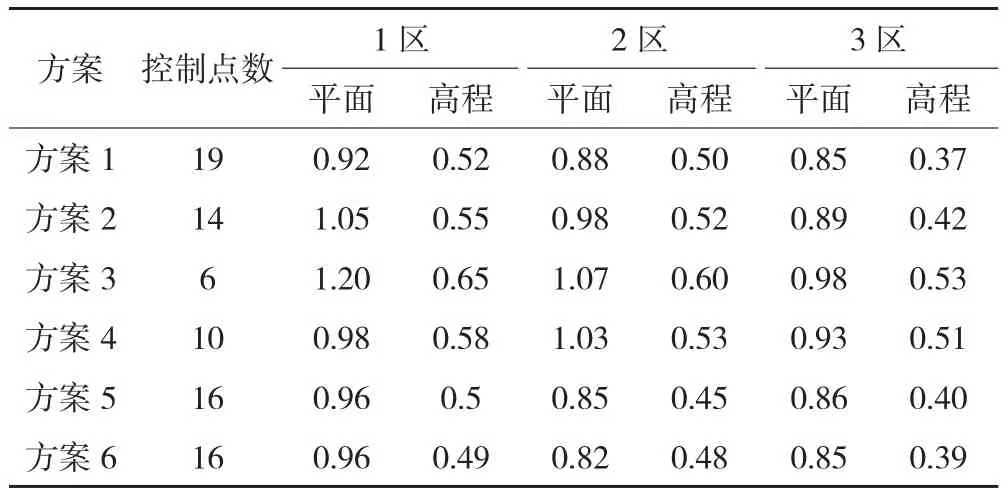
表1 3个区域在不同控制分布状态下检查点中误差/m
从表1可看出,控制点在不同分布情况下对成果精度有一定影响,在19个点全部参与定向情况下整体精度最高;在有航线交叉和平行航线内部控制点参与的定向平差成果中,成果精度相当;航线内部点位不参与定向情况下精度降低,仅用航线中部点位参与定向成果整体精度明显偏低。
不同方案下的平面、高程中误差变化规律如图3、4所示。从图3、4可以看出,高程方面,各区的方案1、方案2、方案6整体精度基本一致,方案3精度明显偏低,表明交叉航线、平行航线中部点位比较关键;在有关键点位参与定向情况下,其他点位参与定向虽能提高整体精度,但提高幅度较小。
利用交叉航线点位和航线中部点位组合定向对整体精度影响明显。
平面方面,在航线交叉处的点位不参与定向情况下,精度最差,但其他方案精度接近,规律性不明显。
在立体环境下读取检查点模型坐标值,并与外业值比较,求得检查点余差最大值,检查3个区域在控制点不同分布状态下平差成果是否满足1∶10 000比例尺成图精度要求,各区精度情况如表2所示。
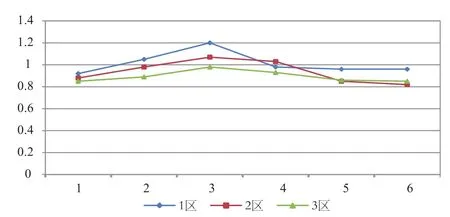
图3 3个区域在不同控制点布设方案下平面精度变化规律

图4 3个区域在不同控制点布设方案下高程精度变化规律
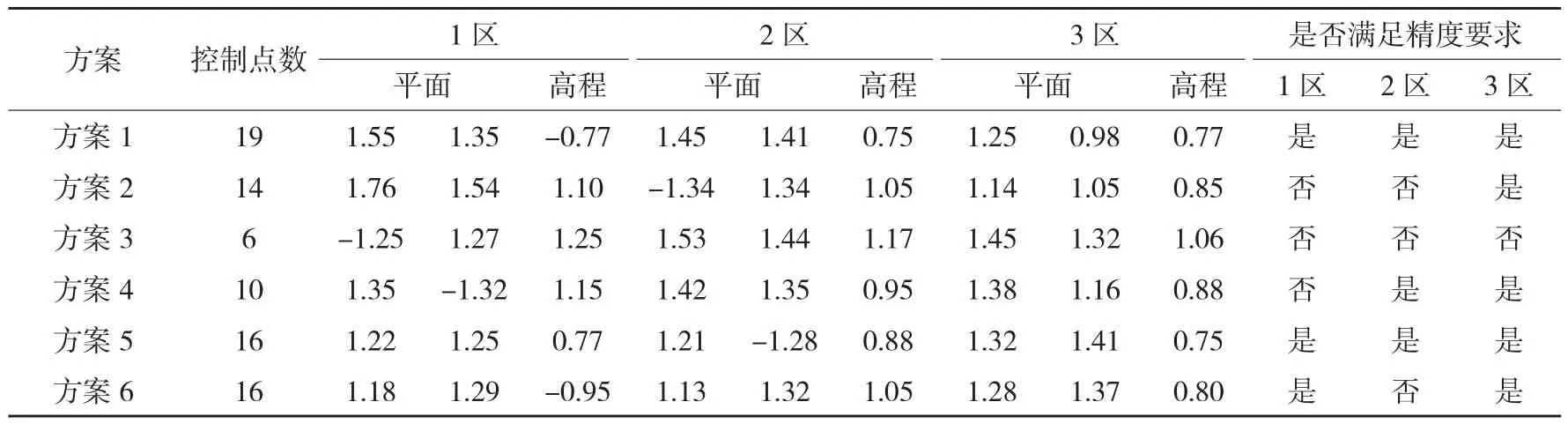
表2 3个区域在不同控制分布状态下检查点余差最大值/m
由表2可知,在航线交叉的公共控制点定向作用明显,在交叉航线控制点和在航线内部选择部分控制参与定向条件下,整体精度较好。
方案5中的P14位于航线中部,方案6中的P13、P17分别位于航线一侧,其中的1区、2区余差明显偏大,表2中的方案6仅列出了P13参与定向情况下的精度情况,P17定向时精度基本一致。通过P13、P14、P17分布情况及精度表现看,20条基线应是控制点布设的最长间隔。
在有POS辅助空三条件下[6,7],平面精度普遍较好,在各方案下均能达到限差要求。通过3个实验区不同方案试验可知:
1)在有POS辅助空三条件下,平面精度普遍较好,在各方案下均能达到限差要求。
2)航线交叉、航线中部等关键点位置一般必须布设控制点。
3)航线交叉位置布设点位一般应尽量考虑控制点公用,尽量减少控制点数量。
4)航线交叉内外拐角均应布设控制点。
5)有POS辅助空三情况下,航线方向一般控制点间距最多为20条基线。
6 结 语
大面阵数字航空影像应用逐步普及,在带状等非规则区域工程应用也较为广泛,但在有POS辅助空三条件下的特殊区域控制点布设需要在工程应用方面逐步探索和完善。本文仅对带状测区下的中等比例尺控制点需求进行了有限度的实验,在大比例尺测绘等情况下的控制点需求,有待进一步实验及分析。
[1] GB/T 13977-92.1∶5 000、1∶10 000地形图航空摄影测量外业规范[S].
[2] GB/T 13990-92.1∶5 000、1∶10 000地形图航空摄影测量内业规范[S].
[3] GB/T 27920.1-2011.数字航空摄影规范[S].
[4] 张剑清,潘励,王树根.摄影测量学[M].武汉:武汉大学出版社,2009
[5] 宁津生,陈俊勇,李德仁,等.测绘学概论[M].武汉:武汉大学出版社,2008
[6] 王铁军,郑福海,王俊杰.IMU/DGPS辅助空中三角测量精度分析[J].地理信息世界,2009,6(4):47-50
[7] 蔡文惠,梁国华.IMU/DGPS辅助航空摄影测量应用探讨[J].测绘通报,2009,54(4):41-43
P231.5
B
1672-4623(2015)04-0127-03
10.3969/j.issn.1672-4623.2015.04.045
汪建峰,工程师,主要从事摄影测量工作。
2014-08-11。
项目来源:地理信息工程国家重点实验室开放研究基金资助项目(SKLGIE2013-M-3-3)。
猜你喜欢
山东煤炭科技(2022年6期)2022-07-14
计算机系统应用(2022年4期)2022-05-10
天津医科大学学报(2021年4期)2021-08-21
河北地质(2021年4期)2021-03-08
航天制造技术(2020年4期)2020-09-11
中国铁道科学(2019年5期)2019-10-19
国际呼吸杂志(2019年4期)2019-03-12
制造技术与机床(2018年12期)2018-12-23
测绘通报(2018年10期)2018-11-02
证券市场红周刊(2018年37期)2018-05-14