
一种对于疲劳驾驶的评估及预警方法
2015-02-06 08:51姜朝曦冯琼琳钱宗亮中国海诚工程科技股份有限公司上海200031
自动化博览 2015年4期
姜朝曦,冯琼琳,钱宗亮(中国海诚工程科技股份有限公司,上海 200031)
一种对于疲劳驾驶的评估及预警方法
姜朝曦,冯琼琳,钱宗亮(中国海诚工程科技股份有限公司,上海 200031)
本文提出了一种基于多传感信息融合的KEEP-COOL疲劳驾驶安全等级评估及预警方法。主要分为以下几个部分:安全等级的划分方法及预警决策方案、基于驾驶员面部特征的驾驶员疲劳度评估方法、基于车道线数学模型分析的车辆行驶状态评估方法。结合各项检测结果,首先划分出驾驶安全等级,然后根据不同的安全等级做出相应的预警及控制反应。
多传感信息;疲劳驾驶;安全等级;预警控制;面部特征
1 引言
在当今社会,随着车辆人均占有率逐步提高,交通事故也逐步增加。在交通事故中,疲劳驾驶俨然已成为引发交通事故的重要原因之一。然而目前,国内外还没有针对疲劳驾驶预警非常有效的指标或模型[1]。为减少事故的发生,本文通过对驾驶过程中检测到的驾驶员疲劳状态、路面状况和车辆参数,独创性的提出KEEPCOOL智能疲劳驾驶安全等级评估方法,通过车载主机进行预警提醒和紧急制动,并依照这种方法提出了一系列的预警处理方案。
2 疲劳预警方法研究
本系统用摄像头A对驾驶员的面部特征进行视频的采集[2]。用摄像头B对车道进行监测。其他安装在智能车辆上的传感器还将测得车辆与障碍物的距离、车速、加速度、俯仰角、航向角等。示意图如图1所示。
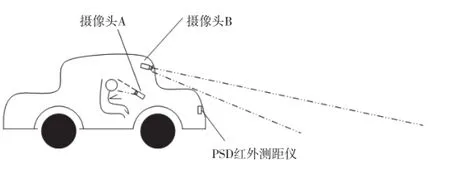
图1 双摄像头和PSD传感器位置示意图
2.1 KEEP-COOL智能疲劳驾驶安全等级评估
对驾驶员状态、车辆状态以及车辆其他参数进行检测。首先结合各项检测结果,划分驾驶安全等级,然后根据不同安全等级做出预警及控制反应。本系统在车速大于20km/h时启动。
首先,将驾驶员面部疲劳度分为Ⅰ度,Ⅱ度,Ⅲ度,Ⅳ度4个等级,分别描述如表1所示,疲劳度评估的具体方法将在后文中描述。
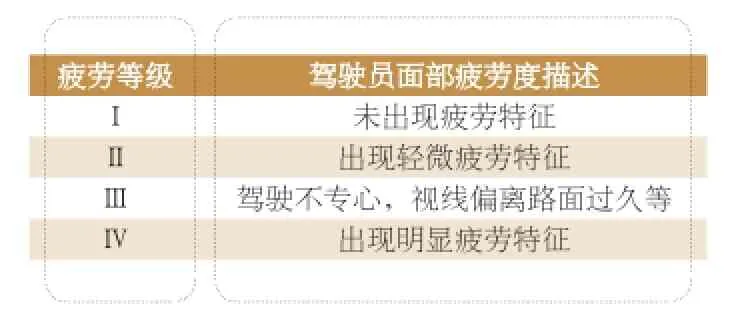
表1 驾驶员面部疲劳度等级描述
将摄像头B检测到的路面车道线状况(即车辆行驶状况)分为A、B、C、D四种情况[3],分别描述如表2所示。

表2 路面车道线状况分类
结合上述驾驶员疲劳程度与车道线状况,将驾驶安全等级分为安全、轻度危险、危险、非常危险四级,如表3所示。

表3 驾驶员疲劳度等级划分
另外,出现以下任何一种情况都视为非常危险:
(1) PSD红外测距仪发出对前方障碍物的报警信号。
(2) 驾驶员连续驾驶时间超过8小时。
(3) 车速超过150km/h。
2.2 疲劳预警决策方案
结合前面划分的疲劳等级,根据不同的情况对驾驶员及车辆做出不同的预警及控制动作,具体操作如表4所示。

表4 疲劳预警决策方案
表4中的语音及控制方案如下:
语音提醒1:“为了行车安全,请勿压线。”
语音提醒2:“您可能需要休息。”
语音提醒3:“请注意车道变更。”
语音提醒4:“为了您的安全,请专心开车。”
语音提醒5:“危险。”
语音提醒6:“为了您的安全,请休息后再行驶车辆。”
控制方案1:车辆以每秒5km/h的速度减速,直至速度减为20km/h。
控制方案2:车辆以每秒15km/h的速度减速,直至速度减为20km/h。
3 驾驶员疲劳度评估方法
3.1 面部状态检测
在表1中,已经将驾驶员面部疲劳程度分为I到IV,4个等级。这里将探讨如何判断驾驶员的疲劳等级。给出各变量的取值及含义如表5所示。

表5 面部图像变量表
实际检测时,首先检测眼睛状态[4],若检测到ey=1(检测到睁开的眼睛),则定义为“睁眼”状态。若检测到ey=0(未检测到睁开的眼睛),再去检测脸部状态[5]。此时,若fc=1(检测到正面人脸),则定义为“闭眼”状态。反之,若fc=0(未检测到正面人脸),则定义为“转头”状态。流程如图2所示。
3.2 疲劳度评估
评估驾驶员疲劳度时,引入PERCLOS概念[6]。PERCLOS是指眼睛闭合时间占一定时间(30秒)的百分率。实践证明驾驶员眼睛闭合的时间越长,疲劳程度就越严重。因此可以通过测量眼睛闭合时间的长短就能够确定疲劳驾驶的程度。
选取10人样本进行测试,测得正常情况下,人在30s内的PERCLOS值如表6所示。

图2 面部状态检测流程图

表6 PERCLOS值测试
将表6的PERCLOS值做一个平均值得到:

本系统检测面部图像的频率大概为50ms一次。以30秒为一个时间单位,统计30秒内检测到的“闭眼”次数,占总检测次数的百分比,作为PERCLOS值。每1秒统计一次前30秒的PERCLOS值。
同时,每1秒统计一次在这1秒钟内检测到“转头”次数占总检测次数的百分比。
根据以上计算结果,本系统选取疲劳阈值为36%,即当闭眼时间占总时间(30秒)超过35%(PERCLOS>35%)时,判定为驾驶员出现明显疲劳特征,即Ⅳ级疲劳。当30%<PERCLOS≤35%时,判定驾驶员出现轻微疲劳特征,即Ⅱ级疲劳。当PERCLOS≤30%时,判定驾驶员未出现疲劳特征,即Ⅰ级疲劳(不疲劳)。
若连续6秒检测到驾驶员“转头”次数占总检测次数的百分比超过90%,则判定驾驶员驾驶不专心,即Ⅲ级疲劳。指标对比如表7所示。

表7 疲劳度划分指标
3.3 自适应灵敏度设定
由于驾驶员行车速度以及行车时间不一定,疲劳判定的规则也不一定。为此,特别提出一个灵敏度的概念,使疲劳度判定规则更加准确有效,有利于系统做出正确决策。
灵敏度与车速和司机驾驶时间有关,主要作用于高速公路和非高速公路这两种行驶状态。这样可以保证车辆在行驶过程中得到充分的安全保障。灵敏度设定如表8所示。

表8 灵敏度设定
对于不同的灵敏度,判定驾驶员疲劳度的指标不同,表7所示指标为中灵敏度情况下的指标。对于其他灵敏度,需将指标PERLOCS的阈值及“转头”时间阈值(中灵敏度:6秒)乘以灵敏度系数。经过实际测试,将灵敏度系数设定如下:
将中灵敏度(灵敏度B)的系数Kb设为1,则:
低灵敏度系数Ka=1.18
高灵敏度系数Kc=0.95
4 车道线数学模型分析
该系统通过摄像头B监测前方道路画面,根据画面上不同的车道线状况,判定出驾驶员不同的驾驶状态。在前面,已经将车道线状况分为四种情况:车辆正常行驶、车辆压车道线(虚线)、车辆大角度偏离车道线、车辆压车道线(实线)。下面通过对检测画面中的车道线进行数学建模来讨论如何判别车辆当前的行驶状况[7]。
4.1 车辆压线
(1)步骤一:判断车辆将要压实线还是虚线
一般情况下,车道线画面中会出现实线和虚线两条线。判断车辆压线,首先要判断车辆压的是当前车道的哪一条线。
当有两条车道线同时出现时,需要通过以下方法判断车辆离左右两根车道线中的哪一根比较近。图3为车辆到右边线的距离示意图。图4和图5为车辆到左边线的距离示意图。
摄像头B监测得到的车道画面,经过一系列图像处理步骤,最终得到当前车道在图像坐标系中的直线模型对应的极坐标参数(ρ,θ)。
其中:
· ρ为计算机测得的原点到车道线的距离;
· A为图像中心点;
· X为图像中心点到车道线的距离;
· a为原点到中心点连线的长度;
· b为车道线与x轴的交点和中心点连线的长度;
· c为车道线与x轴的交点和原点的连线的长度。

图3 车辆到右边线距离示意图

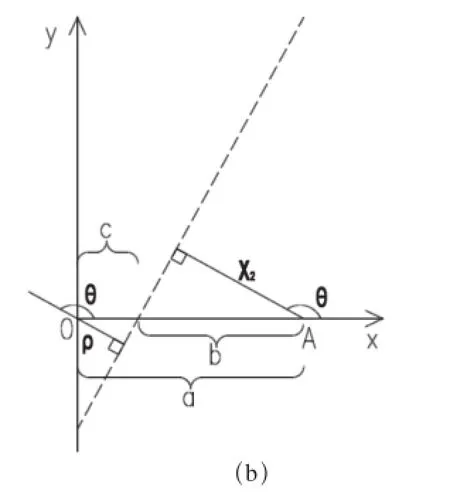
图4 车辆到左边线距离示意图1

图5 车辆到左边线距离示意图2
可以计算出X1和X2的值:

通过以上计算,比较X1与X2的大小:
当X1>X2时,车辆离右边线比较近;当X1 (2)步骤二:判定车辆是否压线 下面给出判定车辆压线的指标,图6为车辆压线示意图。 由图6得出如下公式: X= | cosθ|·m 最后,当计算出的X≤半车身长度时,判定车辆压线[8]。具体压实线还是虚线已在上一步得出。 图6 车辆压线示意图 4.2 车辆大角度偏离车道 摄像头B对左右两条车道线识别后,可以根据识别出的车道线参数求出这两条直线的内角夹角平分线。方法如下: 图7 摄像头B检测画面 图7为摄像头B所检测到的画面,计算角平分线的方法如下:若平面内两直线则11和12的夹角平分线1的方程为: 本系统提出的KEEP-COOL疲劳驾驶评估方法,是一种通过多传感信息融合技术实现的疲劳评估方法,通过摄像头非接触式地采集驾驶员面部特征、车道状况和车辆行驶参数等信息,自适应的控制决策系统,对驾驶员的疲劳驾驶行为做出准确快速的预警。 本系统采用非接触式的传感器采集方式、多传感信息融合决策,大大地提高了驾驶员的舒适性和智能车辆的主动安全性,使汽车的疲劳驾驶预警更加准确。 本系统能有效地减少因疲劳驾驶而产生的交通事故,在未来的交通安全保障方面起到很大的作用,可广泛应用于私家车、公共交通和长途客运的安全保障。 [1] 孙伟, 张为公, 等. 疲劳驾驶预警系统的研究发展[J]. 汽车电器, 2009, ( 1 ) : 4 - 8. [2] Cl′audio Rosito Jung, Christian Roberto Kelber. A Lane Departure Warning System Using Lateral Offset with Uncalibrated Camera [J]. IEEE Conference on Intelligent Transportation Systems. 2005: 102 - 107. [3] 游峰. 智能车辆自动换道与自动超车控制方法研究[D]. 吉林: 吉林大学, 2005. [4] 王会荣. 基于改进 Adaboost 算法的汽车疲劳驾驶预警系统设计[D]. 哈尔滨: 哈尔滨工业大学, 2012. [5] 张建明, 汪大庆. 基于Adaboost算法的多姿态人脸实时视频检测[J]. 计算机工程与设计. 2010, 31 ( 18 ) 4065. [6] S. Boveris. Driver fatigue monitoring technologies and future ideas [C]. Proc. AWAKE Road Safety Workshop 2004. [7] 裘伟. 高速公路车道偏离告警系统的研究[D]. 长沙: 国防科学技术大学, 2006. [8] 于兵, 张为公, 龚宗洋. 基于机器视觉的车道偏离报警系统[J]. 东南大学学报(自然科学版), 2009, 39 ( 5 ): 928 - 932. An Approach to Safety Assessment and Early Warning for Fatigue Driving This paper proposes a fatigue driving safety level assessment and early warning system named KEEP-COOL, which is based on multi-sensor information fusion. This system can be mainly divided into three components: Safety degree appraising and early warning decision scheme; Fatigue assessment method based on the driver's facial features; Traffic condition assessment of vehicles based on lane modeling. By combining on the results of analysis, the system is able to react differently with various safety levels. Multi-sensor information; Fatigue driving; Safety level; Early warning system; Facial features. 姜朝曦(1991-),男,黑龙江人,硕士,毕业于英国巴斯大学(University of Bath),现就职于中国海诚工程科技股份有限公司,主要研究方向为电力系统。 B 1003-0492(2015)04-0074-05 TP273 冯琼琳(1985-),女,江苏人,学士,毕业于上海交通大学,现就职于中国海诚工程科技股份有限公司,主要研究方向为机器视觉及图像处理。 钱宗亮(1983-),男,江苏人,学士,毕业于南京工业大学,现就职于中国海诚工程科技股份有限公司,主要研究方向为电气自动化设计。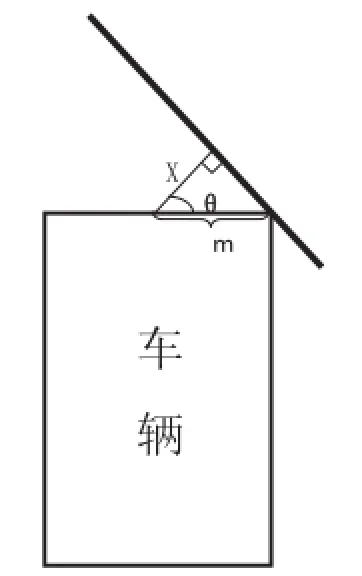


5 结语
猜你喜欢
现代电力(2022年2期)2022-05-23
卫星应用(2021年11期)2022-01-19
科学大众(2021年9期)2021-07-16
中国交通信息化(2020年11期)2021-01-14
装备制造技术(2020年3期)2020-12-25
数学小灵通(1-2年级)(2020年9期)2020-10-27
当代贵州(2019年41期)2019-12-13
制造技术与机床(2017年3期)2017-06-23
探测与控制学报(2015年4期)2015-12-15
中国交通信息化(2015年10期)2015-06-06
