未来潜在PNT技术综述
2015-02-01 01:17张风国欧明刘钝甄卫民
全球定位系统 2015年6期
张风国,欧明,刘钝,甄卫民
(中国电波传播研究所,青岛 266107)
未来潜在PNT技术综述
张风国,欧明,刘钝,甄卫民
(中国电波传播研究所,青岛 266107)
摘要:定位导航授时(PNT)技术已经融入众多领域,涉及军用、民用、商用、科研等各个方面。任何一种导航技术都不是“万能”的,无法满足所有的应用需求,为此,各国对PNT技术非常重视,不断加大投入,各种新导航技术也是层出不穷,它们正处于概念状态或深入研究进程中。本文简要概括了包括X射线脉冲星导航、地磁导航、重力导航、蓝绿激光导航、全源导航、微型PNT技术、微纳卫星技术、量子导航等在内多种具有研究和应用价值的导航技术,分析了不同导航方式的基本原理、优缺点和适用范围,以此进行合理选择实现的组合导航,可满足不同应用场景下的可用性、自主性、隐蔽性、抗干扰性的导航需求,为我国未来的PNT技术发展和PNT体系规划建设提供参考。
关键词:导航;定位;授时;体系结构;PNT
0引言
近几十年来,卫星导航不断发展,应用广泛,也因此形成了对卫星导航技术的强烈依赖性,而卫星导航本身存在一些固有的缺点,如:卫星导航信号弱,易受干扰,英国灯塔局的实验表明,1.5 W的干扰机可以干扰30 km范围内的接收机;卫星导航信号无法穿透建筑物或水体,在室内、峡谷、水下、地下等环境中均无法使用。惯导的致命缺点是误差随时间积累,高精度的惯导器件往往体积较大,价格昂贵,即使采用GNSS+INS的组合导航模式,仍无法满足电磁干扰、物理遮蔽等复杂情况下的导航定位授时需求。为此,需要从国家层面的高度,统筹规划国家PNT体系,以指导未来各种PNT技术的发展,构建科学合理的PNT体系,满足军民商等方面的PNT服务需求。本文广泛调研了多种具有发展潜力的导航新技术,它们各具优势,通过不断发展、不同组合或融合可为各种应用场景提供满足需求的导航定位授时方案。
1PNT新技术研究
本文梳理了X射线脉冲星导航、地磁导航、重力导航、Locata技术、全源导航、芯片原子钟、量子导航等在的内多种正在研究或将来可用的新型导航技术,对民用和军用导航领域均有重大意义。
1.1X射线脉冲星导航
脉冲星是一种快速自转并具有超高密度、超高温度、超强辐射、强磁场的中子星,其质量与太阳相当,但半径仅10 km左右,核心密度达到1×1012kg/cm3.可在无线电、可见光、红外线、紫外线、X射线等频段内观测到脉冲星辐射的灯塔式扫射现象。脉冲星自转周期稳定,自转周期范围一般为1.6 ms~11s,周期变化率(p/p)的典型值为10-15,某些毫秒脉冲星的自转周期变化率可达10-19至10-21,被誉为“自然界最精确的频率基准”[1]。
X射线脉冲星导航系统是自主式系统,不需要地面控制设备,不受人工或自然形成的电磁场的干扰,用户接收机被动接收信号,隐蔽性好,定向、定位精度高,定位误差与时间无关。它不但可以为中远程导弹的近地轨道飞行提供精确的位置、速度、姿态和时间等丰富的导航信息,也可以为地球轨道航天器及深空探测器提供精确的导航信息和时空基准。此外,X射线脉冲星导航定位系统可对现有的GNSS等系统进行补充和备份,可避免敌方的干扰和摧毁,具有进行二次打击的战略意义[2]。
联系人: 张风国 E-mail:zhfg1985@163.com
目前观测到的脉冲星大约有2 000多颗,其中适宜于空间导航定位的X射线脉冲星约有十几颗。DARPA的最终目标是建立一个能够提供定轨精度为10 m(3σ)、定时精度为1 ns(1σ)、姿态测量精度为3弧秒(arcsec,1σ)的脉冲星导航网络,以满足未来航天任务从近地轨道、深空至星际空间飞行的全程高精度自主导航和运行管理需求。
X射线脉冲星导航技术研究处于发展阶段,国外研究工作正在全面进行中,国内也取得了显著成绩,在脉冲星观测、脉冲星辐射机制、脉冲星TOA测量理论模型和算法等方面已取得了许多研究成果,其中涉及的关键技术也正在研究当中,此外,我国正在建设的500 m口径球面射电望远镜(FAST)预计在2016年投入使用,将大大提高我国巡天观测脉冲星的能力。
1.2地磁导航
由于地磁场为矢量场在地球近地空间内任意一点的地磁矢量都不同于其他地点的矢量,且与该地点的经纬度存在一一对应的关系,因此,理论上只要确定该点的地磁场矢量即可实现全球定位。地磁场可以为航空、航天、航海提供天然的坐标系,地磁导航具有无源、无辐射、全天时、全天候、全地域、能耗低、抗干扰能力强的优良特征,可为潜艇、舰船、飞机、导弹等提供位置和方位等信息。
地磁导航可分为地磁滤波导航和地磁匹配导航,目前研究较多的是地磁匹配导航,其原理是通过地磁传感器测得的实时地磁数据与存储在计算机中的地磁基准图进行匹配来定位,地磁匹配导航的过程就是一个用地磁场信息进行导航的过程。
地磁匹配导航的关键技术包括导航区域高精度地磁数据库的建立、载体磁力仪的精确实时测量和快速有效可靠地磁匹配算法。目前,常用的地球磁场模型主要有WMM2010模型和IGRF11模型[6],两者均为每五年更新一次,都描述了主磁场部分,没有描述地壳磁场和变化磁场,为此,需要建立高精度的地磁模型[3-4];如图1所示。载体/平台本身可能会对磁力仪的测量结果产生影响,需要采取相应的抵消措施;地磁匹配算法属于数字地图匹配技术是地磁导航的核心技术,可以借鉴地形、图像匹配导航算法[5]。
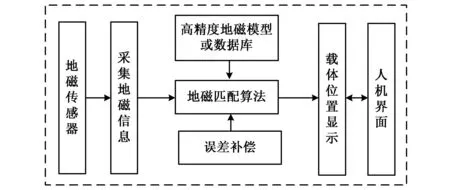
图1 地磁匹配原理图
2003年,美国开发出地面和空中定位精度优于30 m、水下定位精度优于500 m的纯地磁导航系统并计划用于提高飞航导弹和巡航鱼雷的命中率;俄罗斯在此方面的研究也颇为深入,已经将地磁等高线制导系统应用于SS-19导弹中;芬兰Oulu大学研发团队开发的移动地图应用InDooRatlas,可通过识别不同地点的地磁,帮助用户进行室内导航,可在没有无线信号的区域使用。
1.3重力场导航
地球本身的重力梯度具有从一个地方到另一个地方连续变化的特点,且地球重力梯度场有三维的形态,如图2所示。因此,地球重力梯度场为导航系统摆脱对外部信号的依赖提供了可能,基于重力梯度导航技术是一种无源、完全自主的导航方式,工作安全、隐蔽[7-8]。基于重力梯度的导航系统导航精度相当高:一方面,重力梯度或重力高次导数反映场源体的细节,具有比重力本身更高的分辨率,且同一地理位置有多个方向的梯度分量可供综合利用,有力地保证了导航的精确度和可靠性;另一方面,导航误差不随时间积累。
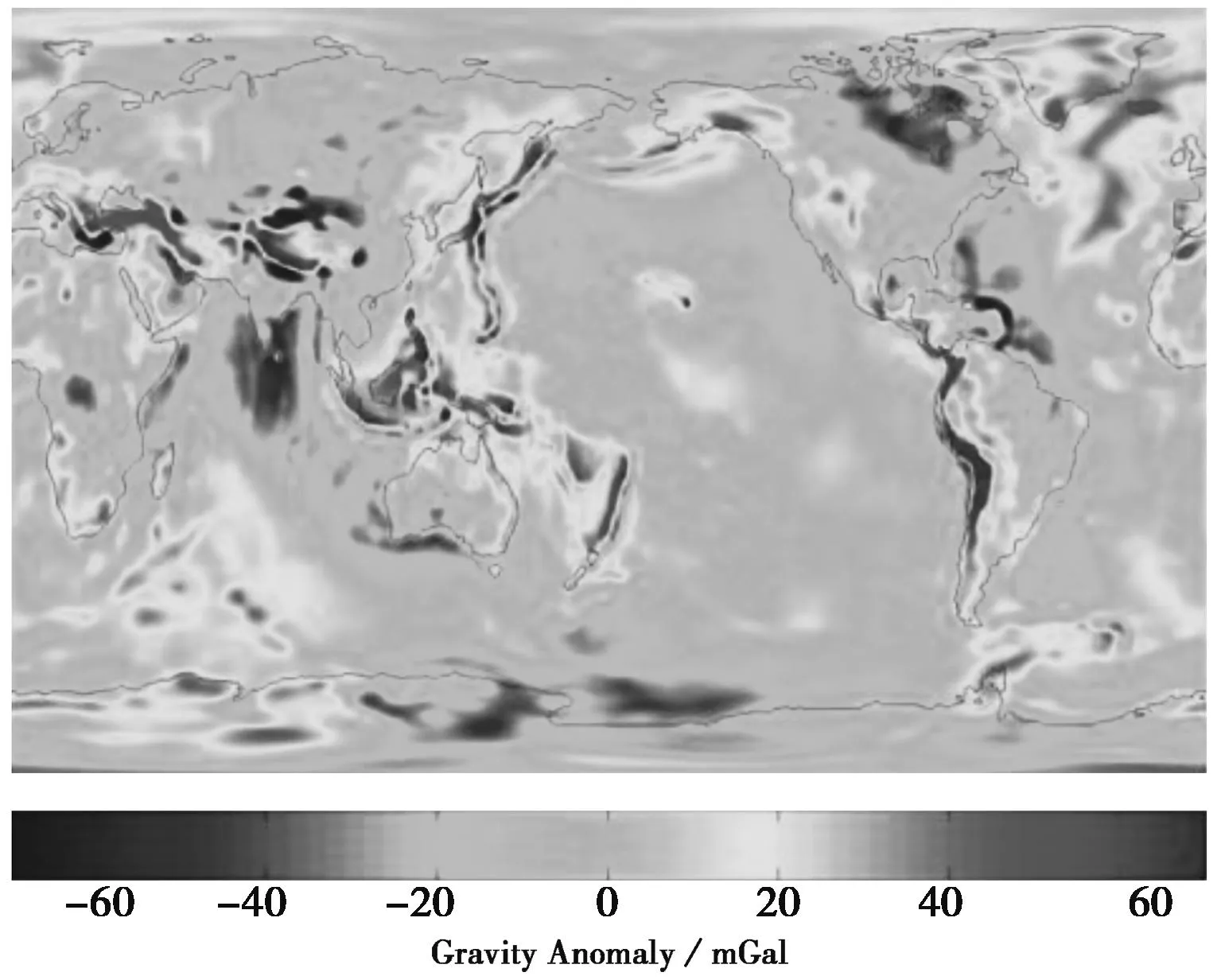
图2 全球重力分布
高分辨率的重力梯度基准图库、高精度的重力梯度测量工具,以及高效的重力梯度图形匹配技术/算法是水下重力梯度导航系统的三大关键技术。利用海洋自身环境的重力辅助惯性导航系统能够克服传统惯性导航外部标校的弱点和缺陷,有效地改善潜艇水下导航定位精度,保证潜艇水下长时间远距离的隐蔽航行。
据报道,贝尔宇航公司研制的重力仪/重力梯度仪惯导系统可满足战略核潜艇、攻击型核潜艇和水下无人运载体的要求,其中重力梯度仪(GGI)是关键元件,整个系统可装在直径为21英寸的潜水器中,1小时的CEP位置精度可达30 m,8小时的CEP位置精度为62 m.此外,为满足核潜艇长期隐蔽航行的要求,美国研制的新一代潜艇导航系统——重力导航辅助的组合导航系统,包括惯性导航仪模块、重力敏感器模块、精密导航仪模块、地形测量等。
1.4偏振光辅助导航
偏振光导航是利用传播介质对太阳光散射作用所形成的天空光是部分偏振的,该偏振信息包含了太阳、地球及用户的位置信息,可用于导航[9,10]。
根据应用场景不同,偏振光导航可分为大气偏振光导航和水下偏振光导航。大气偏振光导航是一种基于天空光的偏振特性,通过在两个或多个方向上测量天空光的偏振方向,利用惯性导航系统提供的舰船姿态和航向信息实现的自动单天体天文定位系统;水下偏振光导航可通过测量海洋散射光的光振动方向实现导航,该种导航方式的使用限制是要选取合理的工作深度和工作时间[11]。
偏振光导航系统不需要地球物理场数据的支持,同时具有天文导航可靠性好的优点,在辅助惯性导航方面将具有广泛应用前景,而定位准确度则是影响偏振光天文导航方式发展的关键。偏振光导航只能描述移动平台在二维平面上的运动,没有对高度的感知能力,通常需要依赖于其他的导航方法实现组合导航。
决定偏振光导航准确度的因素主要有传感器的灵敏度和探测方向天空光的偏振敏感性,当偏振光探测传感器准确度达到角分级时,舰船定位误差理论上优于1海里,可应用于辅助舰船惯性导航。
1.5ELORAN导航
在2008年发布的新的联邦无线电导航规划中,美国对罗兰C的政策声明是:保持罗兰C系统的短期运行并将罗兰C经过改造转变成现代化的罗兰C系统,即ELORAN[12],为此在规划中单独设立专题进行阐述。由于资金等问题,美国于2010年宣布停止使用LORAN C系统,但弹性导航与定时(RNT)基金会在美国已经启动,以争取实现对美国原先的罗兰-C系统基础设施的重新利用。韩国为了抵制朝鲜对其实施的GPS干扰,决定发展eLORAN系统,在韩国境内部署5个罗兰发射站和43个差分站,2016年具备初始运行能力,2018年具备全面运行能力[14]。英国和爱尔兰的灯塔总局(GLAs)也在积极研究布设eLORAN系统。
ELORAN作为陆基系统它采用独立的体制,可作为GPS的备份系统在GPS失效时将为用户保持PNT服务,它比传统罗兰C拥有更高的精度、可靠性和连续性同时保持了现有的罗兰C的所有功能可以为通信系统用户和其他重要的基础部门提供高精度的时间频率基准参考,这些对传统罗兰C的提高是通过对台站设备的升级、在空间传播信号中加入数据信道以及在接收机端的多台链数字信号处理来实现的。它可以满足飞行领域非精密进近和在航海领域港口进近的要求[13]。
相关文献给出的一些评估试验表明,ELORAN在信号精度、信号有效性、信号可靠性和工作连续性上都达到了在美国作为GPS备份系统的要求。目前美国的LORAN系统可作为主要或备份的时间频率源用于精确授时,提供授时精度为100 ns(和UTC(USNO)比较)、稳定度为10~11数量级的时间频率基准。
1.6Locata技术
Locata技术是一种新地基无线电测距技术,在相对开放的室外环境(如露天矿场、建筑场所、港口等)中,实物如图3所示,LocataNet可提供实时的厘米级的单点动态定位而不用差分基站,在物理障碍环境(如深山峡谷、茂密森林、室内和市区等)中可提供连续信号覆盖,高精度定位能力。

图3 LocataLite实物
LocataLite并不是传统意义上的伪卫星,它工作在ISM频段(2.4~2.4835 GHz),采用类似于GPS的直接序列扩频技术,多个Locata地基收发器LocataLite组成LocataNet,能发射很强的时间同步测距信号覆盖某个区域,可实现不依赖GPS和INS的高精度定位结果,不但可以单独使用,也可与GNSS和INS组合使用[15]。通常发射功率小于1 W,信号强度的典型值一般为-60~-105 dBm.Locata创建的网络采用Time-Loc的专利技术进行时间同步,而不使用原子钟。据称当前的Locata网络时间精度为2 ns. 图4示出了美国白沙导弹靶场的Locata试验网布设。飞行测试结果表明,Locata技术的水平定位精度约为6 cm,垂直精度约为15 cm[24],美国于2014年发布了《Locata信号接口控制文档》,详细介绍了信号结构以及与GPS的异同[16]。

图4 美国白沙导弹靶场的Locata试验网布设
1.7芯片原子钟
芯片原子钟(CASC)也可称为微型原子钟,具有体积小、重量轻、功耗低、稳定度高等特点,如图5所示,微型原子钟在通信、交通、电力、金融、军事国防、航空、航天以及基准物理量的测量等领域有着广泛的应用前景和应用需求。微型原子钟可以改善大量装置的特性,其广泛应用将会产生深远的甚至革命性的影响,将会带来良好的社会效益和经济效益。

图5 芯片原子钟SA.45s
芯片原子钟的发展为高安全超高频通信和抗干扰GPS接收器提供了超微型、超低功耗的时间和频率基准,大大提高超高频通信和导航相关系统和平台的机动性和稳定性。CSAC可以促进小型惯导系统在船舶、飞机、潜艇等运输器上的应用。微型原子钟可大大缩短军用GNSS设备解码时间,精确计时可以帮助作战部队快速重捕导航卫星信号,微型原子钟同样适用于手持低功耗通讯设备和个人导航仪。
目前,Symmetricom开发的一款微型原子钟SA.45 s,体积小于17 cm3,功耗小于120 mW,秒稳优于1.5×10-10,月稳优于3×10-10.DARPA的研究人员将设计开发体积仅有1cm3,功耗小于30 mW的原子钟[17]。
微型原子钟和其它先进的计时技术还可以集成到GPS导航卫星上,从而研制“纳米GPS卫星”,极大提高导航卫星星座的生存能力。
1.8微型PNT技术
微电子机械系统(MEMS)结合了机械可动结构和大规模、低成本微电子加工的优点, 在微小尺度上实现了与外界电、热、光、声、磁、流信号的相互作用。MEMS器件体积小、重量轻、耗能低、惯性小、谐振频率高、响应时间短;机械电器性能优良;批量生产可大大降低生产成本;集成化程度高[18-19]。MEMS技术在航空、航天、军事、汽车、生物医学、环境监控等人们所接触到的几乎所有领域中都有着十分广阔的应用前景。在军事领域,可应用于单兵携带、战场实时监测、武器安全、弹道修正、超低功率无线通讯信号处理、高密度低功耗的数据存储器件、敌我识别系统等方面。
DARPA在2010年启动微PNT系统研究项目,利用现有的MEMS技术研究微型化的PNT设备。DAPAR把MEMS技术确认为美国急需发展的新兴技术并资助了大量微PNT系统研究工作,目的在于开发高稳定度和高精度的芯片陀螺、芯片原子钟以及完整集成的定时和惯性测量单元。DARPA已开发了一种可集成在一个芯片上的微PNT的原型设备,该设备包括三个陀螺仪、三个加速度计和一个高精度时钟,与现有的传感器相比,尺寸小、重量低、性能优良。
1.9微纳卫星导航
微纳卫星通常指质量小于100 kg, 具有实际使用功能的卫星。它是基于微电子技术、MEMS 技术、微光电技术等技术发展起来的,体现了航天器微小化的发展趋势。根据卫星质量,10~100 kg的卫星称为微型卫星,1~10 kg的卫星称为纳米卫星,0.1~1 kg的称为皮卫星,0.1 kg以下的称为飞卫星。一枚小型火箭一次就可以发射数百颗这样的微纳卫星。
微纳卫星具有功能密度与技术性能高、投资与运营成本低、灵活性和机动性强、系统建设周期短(可以采用标准化设计、批量化生产)、风险小、可靠性强等优点,引起各国军方高度重视。星上处理技术,微型计算机及软件,微机械构件与组件,可变形可压缩天线及展开机构等技术是未来微纳卫星的发展方向。
在战时,如果现有的导航卫星遭到破坏,可一次发射多颗卫星进行组网,为战场提供临时的PNT服务信息,降低了导航卫星被敌方摧毁所带来的风险,减轻了陆基导航备份系统的压力,一次发射几十甚至上百颗微纳导航卫星,可以极大提高生存能力,使得敌方很难摧毁,即使少数卫星被摧毁或发射故障,其它卫星仍可正常提供PNT信息服务。
1.10随机信号导航
GPS是通过跟踪卫星发射的信号实现导航,用人造随机信号(SoOP)导航原理相同,不同点在于SoOP导航所跟踪的信号不是那些以导航为目的所发射的信号,而是为其他特定目的发射的信号,如调幅和调频无线电、卫星无线电、电视、手机发射网、无线电脑网,以及其他多种卫星信号[23]。
SoOP导航相对GPS导航有若干优势。SoOP大量存在,种类多,可以保证导航用户定位需要;SoOP的接收信号强度经常远大于于GPS信号;采用SoOP导航的用户不必考虑设备部署或运行费用,但不同信号之间存在同步问题,用户接收机无法预知所接收信号的结构,且多路径或反射信号可能会导致SoOP导航发生错误。
为了减轻或解决定时问题,在典型的SoOP导航模式中,通常包括一个坐标位置已知的基地台,允许用户装置提取SoOP中的某些特征,用于数字音频/视频广播和许多无线网络装置的正交频率分配多路传输,是一种最具潜力的SoOP信号结构,这些信号可能含有冗余信息,用户获得导航数据可不必使用基地台。
1.11全源导航
全源导航(ASPN)系统以惯性导航为基础,可使用GPS、机会信号、影像、光线测定和测距、磁场、重力、时钟、磁罗盘、气压计以及雷达等各种传感器信息,以实现导航定位功能[24],如图6所示。全源导航算法运用所有可用信息,能根据承载平台的动态变化而计算出精确的结果,当某些传感器不可用时,导航系统仍能正常定位。用户不仅可以在开阔地区进行导航定位,还可以在水下、地下、丛林、峡谷、室内等遮挡或封闭环境中定位,满足GPS受阻环境下的精确导航需要。

图6 全源导航系统示意
为研发“即插即用”式导航系统,需要开展大量的科研工作,研究出一套基本整合算法和整合搭配结构(包括所有硬软件),能连接并结合来自多个物理传感器的输入数据。全源导航的发展目标是对不同的环境最优化配置不同的传感器并能自由切换,具备“即插即用”式导航系统的特征,在体积、重量、功率等方面降到可接受的范围,算法尽量简化。
对军事用户而言,“全源导航”技术将解决强对抗战场环境下的精确定位、导航与授时问题,提供更加稳健的定位、导航与授时能力,能够在未来强对抗的战场环境下拥有高精度定位、导航与授时能力的重要优势。
1.12蓝绿激光通信导航
目前,对潜通信的主要手段有甚低频(VLF)通信和超低频通信(ELF)。甚低频的平均海水穿透力约为10~15 m,数据率约为75 bit/s,潜艇需上浮至危险深度或潜望深度以4节左右的航速航行,且要保持一定的航向才能有效接收信号,因而失去了隐蔽性;超低频电波穿透海水的深度可达80~120 m,兼顾不间断通信和隐蔽性的要求,但超低频通信数据率低,通常不到1 bit/s,只能发送极重要而又简单的信息作为振铃之用。
波长为450~530 nm的蓝绿激光在海水中的衰减最小,最大穿透深度可大于600 m.潜艇完全不用上浮至危险深度或浮出水面,且可以在工作深度或更深的海水中用自身壳体上的光学天线接收报文,不影响潜艇的机动性和隐蔽性[20-21]。
激光对潜通信导航按激光器载体可分为星载激光通信系统和机载激光通信系统星载系统可覆盖全球范围,比较适合对战略导弹核潜艇的通信,机载系统则对战术潜艇更为有效现在正在解决的问题是其自动瞄准、捕获和跟踪(APT)技术。蓝绿激光对潜通信的数据率高,传输容量大,可传输数据、语音和图像信号。另外,它还具有波束宽度窄、方向性好、设备轻小、抗截获、抗干扰、抗毁能力强及不受电磁和核辐射的影响等优点。星载激光对潜通信系统同样可用于潜艇导航,具有隐蔽性和抗干扰抗欺骗的优点,并且可以导航通信一体化。
1.13量子导航
量子定位系统(QPS)在定位精度以及信息安全等方面的绝对优势无疑将会引起一场卫星导航和定位领域的技术革命。量子力学理论所能允许的情况下,其精度的提高程度取决于在这种定位体制下每个量子脉冲中所能包含光子数目的多少。当在每个脉冲中大量采用具有量子特性的光子时,脉冲时延的测量精度会大大提高,可比GPS的定位精度高2-4个数量级。基于量子特性的卫星定位系统可以通过设计量子加密协议防止敌方破解使用,这归功于量子加密具有很高的安全性[22],QPS技术还提供了一个检测窃听者的可能。
英国科学家将在未来三到五年的时间内开始研发“量子罗盘”这项新导航技术,量子罗盘的敏感性可感知地球磁场和重力场的变化,从而换算出精确的位置信息,它对核潜艇有着至关重要的作用,可以摆脱对卫星导航系统的依赖,精确定位潜艇的位置,并为发射导弹服务。
1.14中微子导航
中微子是一种质量极小、不带电的中性基本微粒,它能以接近光速直线传播,不参与重力、电磁力以及质子和中子结合的强相互作用与其它组成物质的基本粒子之间互相作用力很弱,在传播过程中能量损耗甚微,可很容易地穿透海水、钢铁以至整个地球,不需要卫星和中继站,传播距离远且方向性好,保密性强,不受电磁波的干扰。中微子可用于潜艇通信导航,可彻底解决通信过程中的信号衰减和遮挡问题,也可彻底解决水下长航时精确导航的隐蔽性问题,具有突出的战略优势,此外,中微子还可应用于深空定位导航。
与电磁波产生原理不同,中微子需要利用高能加速器来产生,当质子流的能量被加速到4千亿电子伏时,从加速器中引射出来轰击铅靶,从而获得大量带电介子和K介子,然后衰变为中微子。在接收端,由于中微子不带电,因此不能用电子器件来接收,而需要采用一种“间接”的探测技术来完成这一工作。
80年代,前苏联和美国进行了中微子通信的试验,获得了成功。1986年,美国还与原苏联合作进行了中微子穿透地球的试验。2012年3月,大亚湾中微子实验国际合作组宣布,实验发现了一种新的中微子振荡,并测量到其振荡几率。目前,中国、美国、加拿大、德国、日本等正在不断研究和改进中微子的产生和探测技术及相关理论模型等。
2结束语
上述多种导航方法各具优势,可用于不同环境下的导航定位授时需求,可为我国的PNT体系发展方向具有参考价值。卫星导航和普通惯性导航技术非常成熟,本文未进行分析。综上所述可得出如下结论:
1) X射线脉冲星导航具有抗干扰性、抗毁性和隐蔽性,可为航天器提供自主导航定位信息和精度极高的时间信息;
2) 地磁导航、重力导航和偏振光导航均属于自主导航,不需要发射信号,具备隐蔽性,可为地下、水下等环境中的用户提供导航定位服务信息,误差不随时间积累;地磁导航容易受干扰,重力导航具备抗干扰性,两者的导航原理基本相似,都需要制备高精度匹配图、研制高灵敏度传感器、研究快速高效的匹配算法,偏振光导航不需要匹配图,通常只能实现二维定位;
3) ELORAN属于远程地基低频无线电定位系统,具有较强的抗干扰能力和较高的定位精度,具备GNSS系统的战略备份能力;
4) Locata技术是类似于伪卫星的局域高精度实时定位系统,具备室内定位能力和较强的抗干扰能力,设备轻便,功耗低,可为PNT用户提供高精度的时间和位置信息;
5) 芯片原子钟和微纳卫星都可归纳到微型PNT技术范畴内。芯片原子钟体积小,功耗低,具有很强的守时功能;微纳导航卫星可作为紧急情况下的GNSS系统备份;微型惯导和时钟技术可满足特定用户对PNT信息的需求;
6) 全源导航基本包含随机信号导航的信号源,其主体思想就是采用“即插即用”的方法,开发合理的算法,“利用一切可用的信号用于导航”;
7) 量子技术目前处于试验研究阶段,中微子技术难度很大,尚处于起步状态,一旦获得成功,将彻底解决信号遮挡问题。利用蓝绿激光可解决水下潜艇等潜航器的通信和定位问题。
参考文献
[1] 史世平,徐青.X射线脉冲星导航定位原理及应用[J]. 测绘科学与工程,2007,27(2)5-7.
[2] 毛悦.X 射线脉冲星导航算法研究[D].郑州:解放军信息工程大学,2009.
[3] 杨云涛,石志勇,关贞珍,等.地磁场在导航定位系统中的应用[J].中国惯性技术学报,2007,15(6):686-692.
[4] 郭才发,胡正东,张士峰,等.地磁导航综述[J].宇航学报,2009,30(4):1314-1319,1389.
[5] 孙宁芹.地磁匹配导航应用于巡航导弹的关键技术分析[J].飞航导弹,2011(10):66-70.
[6] 彭富清.地磁模型与地磁导航[J].海洋测绘,2006,26(2):73-75.
[7] 李德禹.水下重力梯度导航关键技术研究[D].武汉:华中科技大学,2009.
[8] 刘凤鸣.重力梯度辅助导航定位技术研究[D].哈尔滨:哈尔滨工程大学,2010.
[9] 江云秋,高晓颖,蒋彭龙.基于偏振光的导航技术研究[J]. 现代防御技术,2011,39(3):67-70.
[10]祝燕华.天空偏振光辅助的组合导航方法[J].中国惯性技术学报,2012,20(6):674-677.
[11]王光辉,刘晓亮,万峻,等.水下偏振光导航[J].舰船科学技术,2011,33(7):78-82.
[12]汪捷,严建华,李川章.国际eLORAN发展现状与我国罗兰C现代化的技术分析[J].海洋测绘,2009, 29(3):79-82.
[13]International Loran Association.Enhanced loran (eLoran) definition document [R].2007.
[14]SEO J, KIM M. ELoran in Korea- Current status and future plans[C]//Poceedings of the Europen Navigation Conference, Vienna, 2013:23-27.
[15]Locata Signal Interface Control Document[R].2014.
[16]GAMBALE N. New technology for PNT resilience[R].2014.
[17]深圳儒科电子CSAC-SA.45s原子钟测试[EB/OL].[2012-10-19]. http://www.doc88.com/p-958217609900.html.
[18]李荣冰,刘建业,等. 基于MEMS技术的微型惯性导航系统的发展现状[J].中国惯性技术学报,2004,12(6):88-95.
[19]方震华,黄慧锋.微电子机械系统(MEMS)技术在军用设备中的应用现状[J].电子机械工程,2010,26(4):1-4.
[20]张礴,顾李冯.蓝绿激光在水下航行器导航中的应用展望[J].机械与电子2011(5):41-44.
[21]刘恒殊.应用激光进行控制与水下通信[J].光机电信息,2009,16(11):34-35.
[22]BAHDER T B. Quantum positioning system[C]//The 36th Annual Precise Time and Time Interval (PTTI) Meeting Naval Observatory Washington D C Washington 2004: 423-427.
[23]FISHER KENNETH A, RAQUET JOHN F. Precision position, navigation, and timing without the global positioning system[J]. Air & Space Power Journal,2011:24-33.
[24]李冀.国外提升卫星信号在拒止环境下导航定位能力的新技术[J].导航定位学报, 2013,1(2):55-59.
张风国(1985-),男,工程师,主要从事导航定位授时(PNT)研究和电离层闪烁效应研究方面的工作。
欧明(1984-),男,在读博士,主要从事电离层探测技术研究。
刘钝(1973-),男,高级工程师,主要研究方向为卫星导航应用技术,卫星导航系统环境影响效应评估及应对措施等。
甄卫民(1963-),男,研究员,主要从事空间环境、电磁环境和卫星导航领域研究。

Review of Potential Navigation Technology
ZHANG Fengguo,OU Ming,LIU Dun,ZHEN Weimin
(ChinaResearchInstituteofRadiowavePropagation,Qingdao266107,China)
Abstract:PNT technologies have been used widely in many kinds of applications, including military, commerce, civil, science and so on. Many countries have placed great emphasis on PNT technologies and plenty of new methods spring up in recent years, which are instatephase or in study and development. This paper reviews various valuable and useful methods of positioning and navigation, including X-ray navigation, geomagnetic navigation, gravity navigation, blue-green laser navigation, all-source navigation, micro-PNT, micro/nano-satellites navigation, quantum positioning system (QPS),and then analyzes their principles, advantages and disadvantage. The requirements of availability, autonomy, covert and anti-interference performance in different situations could be satisfied with reasonable combination of these PNT technologies. The analysis and conclusions can provide valuable references for the development of potential navigation technologies and national PNT architecture design.
Key words:Navigation; position; timing; architecture; PNT
作者简介
收稿日期:2015-04-27
中图分类号:P228.4
文献标志码:A
文章编号:1008-9268(2015)06-0027-08
doi:10.13442/j.gnss.1008-9268.2015.06.006
猜你喜欢
中学生数理化·七年级数学人教版(2022年6期)2022-06-05
导航定位与授时(2020年5期)2020-09-23
中国外汇(2019年20期)2019-11-25
电子制作(2019年10期)2019-06-17
海峡姐妹(2018年2期)2018-04-12
中国新技术新产品(2017年2期)2017-01-20
科技创新与品牌(2016年11期)2017-01-09
中国新技术新产品(2016年23期)2016-12-26
现代防御技术(2016年1期)2016-06-01
科技视界(2016年4期)2016-02-22