飞思卡尔智能车竞赛赛道新规则解析
2015-01-29 02:57:22卜旭芳陈晓芳安文倩
电子设计工程 2015年9期
贾 超,卜旭芳,陈晓芳,安文倩,李 昆
(燕京理工学院 河北 廊坊 065201)
为了加强大学生实践、创新能力和团队精神的培养,教育部高等自动化专业教学指导委员会主办全国大学生“飞思卡尔”智能汽车竞赛。在该竞赛中,比赛队伍分为光电组、摄像头组和电磁组,每支参赛队伍要制作一个能够自主识别路径的智能车,在专门的跑道上自动识别道路行驶,以完成时间最短者为优胜。本文以第九届全国大学生“飞思卡尔”智能车竞赛为背景,对比分析了本届与第八届比赛规则的不同之处,并给出了新规则的处理方法及注意事项,希望对参加比赛的同学有所帮助。
1 赛道新规则
1.1 赛道宽度
光电组和摄像头平衡组的赛道两边有黑色的边线作为导引线,要求赛道宽度不小于45 cm,赛道与赛道中心线之间的距离不小于60 cm。对于电磁组则没有赛道宽度的限制,但是为了保证车模能够完成赛道一圈的运行,要求车模必须经过赛道上所有要求通过的路段标志。
1.2 曲线弯道
赛道中具有多段曲线弯道,这些弯道可以形成圆形环路,圆形拐弯,S型赛道等。赛道的中心线的曲率半径大于50 cm。如图1所示。
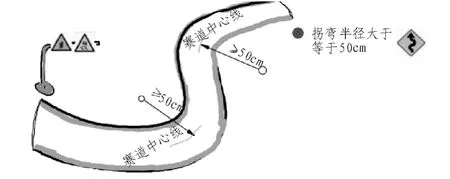
图1 曲线赛道Fig.1 Curve track
1.3 强制掉头路口
光电组和摄像头平衡组赛道具有掉头路口。车模允许在此区域掉头,或者改变车模的方向。车模可以在比赛开始时手动设置或者比赛过程中自动识别从一条道路驶入,从另外一条道路使出。掉头区域长度为1.5 m。其中铺有斑马线,线宽和间距都是10 cm。斑马区的第一条黑线距离两条内侧交汇点50 cm。交汇的两条道路可以是直线,也可以是曲线。斑马区的中心线处于交会角的角平分线上。如图2所示。
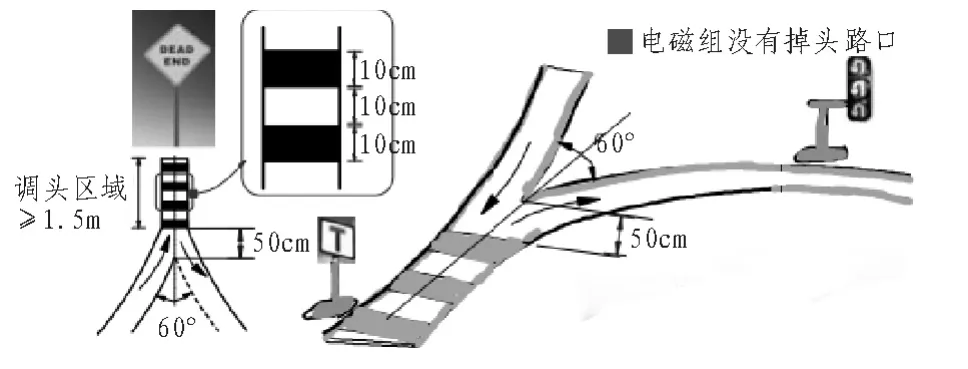
图2 强制掉头路口Fig.2 Forced to turn round crossing
1.4 赛道障碍
路障由两块砖头叠放封装后放置在赛道的一侧。路障内侧与赛道中心线距离为8 cm。标准砖头的尺寸为:240 mm*115 mm*53 cm,如图 3所示。

图3 障碍赛道Fig.3 Barrier track
1.5 不对称坡道
本届的坡道可以是不对称坡道,坡度不超过30°,坡道的过渡弧长大于10 cm。坡道的长度、高度没有限制。一般情况下总长度会在1.5 m左右。如图4所示。

图4 不对称坡道Fig.4 Asymmetric ramp
1.6 电磁直角弯道
电磁组赛道具有直角弯道,直角弯道的角度大于90°[1]。如图5所示。

图5 直角弯道Fig.5 90°curve
2 循迹原理
光电组和摄像头平衡组的赛道导引线是分布在赛道两侧的黑色边界线,通过导引线引导车模完成比赛,但要求光电组车模在运行过程中必须保证有3个车轮同时在赛道的边界线内,光电组用光电传感器或者指定型号的线性CCD传感器检测路面信息。大部分参赛队伍采用线性CCD传感器,其原理为:该传感器的AO口依次输出各像素点的模拟量的电压值信号。通过模数转换模块将模拟量转换成数字量,然后将128个像素点分成两半,一边64个像素点。确定合适的阈值后,将采集到的电压信号进行二值化处理。分别记录左、右两边64个像素点由白变黑的点,对左、右由白变黑的坐标,求算数平均值,与CCD的中心点坐标比较,算出车模偏移量,从而做出相应的调整,引导车模大致循迹行驶[2]。
摄像头平衡组要求车模在运行过程中必须保证车模的两个车轮同时在赛道的边界线内,通过摄像头采集道路图像(一维或者二维)。将采集到的图像利用阈值法或者边界法进行分割处理,图像经过分割二值化后,将每一行的黑白跳变点按从右到左的顺序记录下来,保存到两个二维数组里(分别表示上升沿、下降沿)。通过遍历上升沿和下降沿可以完成赛道边沿的提取。提取的道路的信息主要包括:赛道变化的幅度,赛道两侧边沿点位置、通过校正计算出来的赛道中心位置,中心点规划面积,从而可以进行赛道类型的判别[3-5]。
对于电磁组,导引线为一条铺设在赛道上的直径为0.1-1.0 mm漆包线,其中通有20 kHz,100 mA的交变电流。频率范围(20k±1k),电流范围(100±20 mA)。由于导引线会发出的20 kHZ的交变电磁波,根据磁感线的闭合性和方向性,通过两个线圈的磁通量的变化方向具有一致性,即产生的感应电动势方向相同,所以,比较两个线圈中产生的感应电动势即可判断出赛车的相对于赛道中线的位置,进而做出调整,引导车模大致循迹行驶[4-6]。
3 新规则的处理方法及注意事项
3.1 赛道宽度
本届比赛对于电磁组赛道的宽度不做要求,但是要求必须经过路段标志,这些赛道标识都画在赛道表面并与电磁导引线中心对齐。对于参赛队伍来说这部分可能是一个“取巧”的重要部分,没有赛道限制只要经过路段标志即可,是否可以通过第一轮的试车阶段记忆路段标志位置,通过大量的数据分析,按照两点之间直线最短的原则找出一条最佳路径。或者在实际组装赛车时,选择多个电感并且电感以不同的角度摆放来增加车模的前瞻,从而提高比赛成绩。
3.2 曲线弯道
弯道是车模提升速度节省比赛时间的关键,处理不好会限制车模的速度。弯道的半径越小,对车模的速度限制越大,因此对车模的控制能力也要求越高。在弯道行驶时,切弯路径的选择会影响车模的运行时间,在调试车模时,各个组别要注意通过优化算法来摆脱弯道对车模的束缚,提高车速来完成比赛。
3.3 强制掉头路口
本届光电组和摄像头平衡组的赛道具有掉头路口,要求车模在此区域掉头或者改变车模的方向,掉头区域长度为1.5米,铺有斑马线,这就要求光电组和摄像头平衡组有足够大的前瞻,能够较早的检测到斑马线,及时刹车减速掉头,从另一条道路使出。光电组可以采用两个线性CCD(一前一后),当前线性CCD采集到斑马线并到达转弯路口时,立即启动使用后线性CCD[7-8],动力轮在前,转向轮在后,从而使车模掉头。对于摄像头平衡组来说也可以仿照光电组的形式来应对强制掉头路口。此外,因为摄像头平衡组今年两款车模都是双电机的情况,应对强制掉头路段也可以采用差速控制来完成,这就要求车模能够准确的检测出转向方向和转向角度,这样可以事先免去车模返行的各种参数的改变,能够大大减小程序的复杂程度。
3.4 赛道障碍
光电组和摄像头平衡组组可以根据路障的黑色,电磁组可以利用超声波传感器,提前检测出路障及距离路障的距离,并能够及时避障减速,当车模顺利通过路障后,在进行加速行驶。这些都要求车模有足够大的前瞻。而且在检测路障时一点要保证检测准确性,因为砖头路障对于车模的伤害可以说是致命性的,尤其是电磁组,其电感支架很脆弱,所以路障处理要在开始调试时就要格外注意。
3.5 不对称坡道
光电组在过坡道时注意黑线丢失或者车速过快而导致车模行驶不稳,很容易冲出赛道,这就需要车模能够极早的检测出坡道并能够及时刹车减速,同时还要及时检测出赛车到达坡顶以及坡道后的赛道情况,如果车模因速度过快而出现腾空现象,这就要注意车模的稳定平衡性,能够使车模腾空落地后不会偏离赛道。
摄像头平衡组需要利用摄像头及时检测出坡道信息,及时减速,使车有后仰的姿势,防止发生前扑现象。还要注意,就是坡度的加陡,加凸,在车模制作时,车模整体的重力分配是一个很大的考验,稍有不慎,容易造成翻车。因此在硬件的组装上,应注意这个问题。
而对于电磁组,上、下坡道会遇到电感的电压值突变,在上坡时稍微减速防止车速过快而冲出赛道,下坡时利用车模的前瞻检测下坡后赛道的情况,如果坡道后直接接一个弯道,则需要控制车模的速度在安全范围内,防止车模冲出坡道后的赛道。同时还要注意前瞻的位置,以免出现前瞻撞到坡道的现象,在组装车模时要注意车模前瞻的角度和长度,长度过长会出现车体抖动的现象。
对于上述所说的减速,注意速度不要减少的过大,速度过慢会使车模不能完全冲到坡顶,可能在上坡过程中就会停止前进甚至会滑下坡道。此外,还要注意调整车模底盘的高度,以免车模在爬坡时底盘与地面摩擦而损坏车模。
3.6 电磁直角弯道
本届电磁组赛道具有直角弯道,直角弯道的角度大于90°。直角弯道摆放的漆包线其磁感线分布相互垂直,所以直角弯处横向摆放电感几乎没有电压信号,这就需要采用合理的电感摆放方式来应对。利用前瞻提前检测出直角弯道并能够及时刹车减速实现安全过弯。
4 结束语
通过对赛道新规则的分析,各个组别可以对不同的赛道采用不同的控制方法,使车模能够极早做出决策,安全通过每种赛道,以最快的速度到达终点。在具体调试车模时,处理各种赛道还要根据具体的车模来选择不同的方式。
[1]第九届全国大学生“飞思卡尔”杯智能车竞赛——竞速比赛规则与赛场纪律。[EB/OL].[2012-10].http://www.smartcar.au.tsinghua.edu.cn/.
[2]张春辉,田建超,樊迪.第八届武汉科技大学光电组首安二队技术报告[R],2013.
[3]卓晴,黄开胜,邵贝贝.学做智能车:挑战“飞思卡尔”杯[M].北京:北京航空航天大学出版社,2007.
[4]候代坡,孔琳琳,王硕,等.电磁导航式智能车控制系统研究[J].机械与电子,2013(2):78-79.HOU Dai-po,KONG Lin-lin,WANG Shuo,et al.Structure study on electromagnetic navigation intelligent vehicle detection and control system[J].Machinery&Electronics,2013(2):78-79.
[5]刘明,王洪军,李永科.基于智能车中摄像头的图像采集的研究[J].电子设计工程,2012(17):158-160.LIU Ming,WANG Hong-jun,LI Yong-ke.Research of image collection of CCD based on smart car[J].Electronic Design Engineering,2012(17):158-160.
[6]山峰,刘刚,郭文俊.第八届北京科技大学电磁一队技术报告[R].2013.
[7]薛旭成,赵运隆.高速多通道CCD预放电路设计[J].现代电子技术,2013(15):160-162.XUE Xu-cheng,ZHAO Yun-long.Design of preamplification circuit for high-speed multi-channel CCD[J].Modern Electronics Technique,2013(15):160-162.
[8]邓刚,韩恒利,钟四成.背照式CCD图像传感器减薄技术研究[J].电子科技,2014(2):68-70.DENG Gang,HAN Heng-li,ZHONG Si-cheng.Backside-illuminated Charge-coupled Devices (CCDS) thinning technology[J].Electronic Science and Technology,2014(2)P68-70.
猜你喜欢
汽车实用技术(2022年15期)2022-08-19 02:29:52
露天采矿技术(2022年1期)2022-02-20 03:48:08
玩具世界(2020年6期)2020-12-06 05:55:22
再生资源与循环经济(2019年10期)2019-11-23 09:04:02
新高考(英语进阶)(2018年1期)2018-04-18 13:59:52
环球时报(2018-01-04)2018-01-04 05:11:26
经营者·汽车商业评论(2016年5期)2017-11-30 16:18:38
河北科技大学学报(2015年6期)2015-03-11 16:16:45
参花(上)(2014年5期)2014-12-12 02:41:57
客车技术与研究(2014年1期)2014-03-20 14:34:51