一种基于点对构造与星等差的近红外星图匹配识别算法
2015-10-29 02:13:49肖楚琬郭少军李德栋
电子设计工程 2015年9期
肖楚琬,郭少军,李德栋
(海军航空工程学院山东烟台264001)
一种基于点对构造与星等差的近红外星图匹配识别算法
肖楚琬,郭少军,李德栋
(海军航空工程学院山东烟台264001)
传统的三角形星图识别算法冗余匹配多,对噪声鲁棒性差,为此,为了提升获取恒星质心位置精度,提出了一种基于恒星星等差和点对距离的恒星星图匹配方法,完成了星空图像中恒星的识别与匹配。实验结果表明,获得的恒星质心位置具有较高的精度,在实际拍摄近红外星空图像恒星目标的匹配与识别过程中具有较好的应用前景。
恒星星等;恒星点对;恒星识别;高精度
恒星图像导航的关键技术是恒星匹配与识别问题[1],一个传感器平台获得恒星近红外图像后需要对恒星进行识别并和先验获得的天球恒星信息进行匹配,从而获得识别恒星的赤经赤纬坐标,进一步地,利用坐标信息和天文坐标转换模型实现传感器平台的经纬度坐标定位,结合恒星指向信息既可完成导航任务。本文既针对近红外天文导航对恒星识别与匹配的算法时效性要求,提出了利用恒星星等差和点对距离相结合的恒星匹配识别算法对近红外拍摄恒星进行匹配与识别[2],主要实验结果如第3节所示,获得了不错的效果。
空间目标成像过程由目标、相机光学系统、成像探测器等组成,影响目标成像的因素有很多:空间目标反射光谱辐照度,光学系统的入瞳面积,焦距,光谱透过率,积分时间,探测波段和光谱相应等等。星空恒星成像是由星敏感器进行拍摄的,由于各种不利条件的影响,利用传统的三角形星图识别算法冗余匹配多,对噪声鲁棒性差,为了获得更好更快的星图识别能力,本文提出了基于基于恒星星等差和点对距离的恒星星图匹配方法,完成了星空图像中恒星的识别与匹配。
对于所拍摄的图像,利用定心算法测量每一个目标在图像中的位置和星等[3]。因为亮星能够提供更加准确的信息,因此把测得的所有星按照亮度降序排列,选择前颗星作为一个列表,记做I。它表示这些星来自图像。而已有的星表能够提供关于星的准确信息,所以从某一个星表中提取亮度高于一定星等的星的基本信息(赤经,赤纬和星等)构成另一个列表,记为R。它表示源于参考星表。期望在列表I中的目标点对在参考星列表I中都能找到对应的匹配星点,然而,实际情况中可能在列表R中没有列表I中的某些点对,两个列表之间只有一部分重叠。增大列表R可以增大匹配概率,代价就是更长的点对构造时间,和以往的方法不同的是增加列表大小不显著增加点对匹配时间。
1 恒星点对构造
恒星点对的构造是建立在恒星质心检测精度的基础上的,提高了质心检测的精度就极大程度地提高了点对构造的精度,相应就降低了无匹配率。恒星质心检测的算法有很多种,包括:修正矩法,中值法,寻导法,高斯拟合质心算法等等,其中高斯拟合算法精度最高,但是耗时较多,本文利用改进修正矩法进行质心计算,精度能达到亚像素级。
1.1恒星质心计算
矩方法也被称为重心法,它具有星像重心等于边缘分布的一阶矩的特点,该方法需要先进行天光背景的改正,基本方程如下:

可以用较外边的边缘分布端点的平均值作为背景水准B,通过高斯拟合背景[6]估计也可以作为背景水准B的值,并且精确度更高。但是无论怎样,这种方法的精度还是无法和高斯拟合法的精度相比,原因是对背景的水准估计精度不高,因为位置偏离星像重心各点在求解过程中是以它的距离为权进行的。
为了克服以上缺点,Stone提出了修正方案,使该方法对天空背景的依赖大为减少,第二章中提到的背景估计和图像分割和这个方案有相似处,但是用途不同。这种方案在原来图像中减去一个高于背景的门限水平的灰度值,这样就有效地消减掉了背景的影响,其方案可以由下面的公式表达:

其中,T=B+3σ,σ为背景方差,B是估计的背景水准,通过高斯函数对星空图像低灰度区域局部直方图进行拟合能得到较为精确地背景水准。
利用(2)是能消除背景的影响,但同时可以看出,利用下式会具有更好的效果[7]:

根据3σ原则,对数据采用这一门限修正后,基本上消除了99.7%的天空背景记数,这时,对于二维图像可以用二维矩方法重心公式来确定近红外星图中星像重心:

其中,g(x,y)为图像坐标(x,y)上的灰度值。
从整个过程来看,可以发现为了减少天空背景对质心检测的影响,首先对天空背景进行了修正,再通过设定一个阈值T来消除背景的大多数记录数据T,而T对成高斯分布的恒星像点没有太大的影响。最后可以把星空图像表示为:

1.2点对构造
为了减少可能发生误配,需要严格的形状定义来保证在几乎常数时间里产生一个成功的匹配。首先从星像列表I中取出用户定义的n颗亮星构造定义好的形状,构造过程中通常把亮星中第一颗亮星A作为坐标的中心,而其它的星B、C、D,…按照相对于A点的坐标构成,并计算他们的角距离和位置角。匹配过程中可能需要构造多个由n颗星定义的形状特征集来进行匹配,一旦匹配成功就停止构造,然后计算底片常数。定义位置角的参考方向朝北,顺时针旋转为角度增加的方向,如图1所示。
定义角距离为:

其中dAD是所拍摄图像中的两颗星A与D之间的距离,以像素为单位;F为焦距;dad是星表中A与D对应的两颗星之间的距离,以弧度为单位。这里假定在列表中的位置信息已经从天球投影到了成像的图像平面[4]。
从列表R中取出前n颗亮星构造点对,一共可以构造的点对数量为:

构造的点对列表中包含了星点的坐标,角距离,位置角等相关信息以供图像中点对进行搜索匹配。为了加快搜索的速度,先按照角距离对构造的点对列表进行排序,位置角也同样被排序,其本身与角距离一一对应。这种方法之需要构造一个点对列表,而且所构造的点对数目远远小于传统的三角形方法所构造的三角形数目。更具有实时性,但是在精度方面比三角形法较差。

图1 预先定义的形状Fig.1Predefined shape
2 利用灰度求星等差
前一部分已经介绍了星等的基础知识,假设有两颗星A和B的星等分别是mA,mB,EA,EB分别表示两颗星的照度,这样就可以用以下的关系式来表达两个星等之间的关系:

在近红外摄像系统口径和积分时间不变的情况下,目标图像的灰度与照度成线性关系。利用这个线性关系。由图像的灰度I(目标所有成像像元的灰度和)可以计算出卫星的星等,有灰度表示的星等计算式如下:

式中,IA,IB分别是星A和星B的像元灰度和。
这种方法对图像有一定的要求,首先图像的成像灰度和亮照度必须是线性的关系,且图像灰度不饱和;其次是背景处理,星空背景灰度必须扣除。在满足这两个条件的情况下星等之间的差值精度计算可高达0.2个星等,因此该方法在对星空成像时是一个可以采用的方法,因为全天时近红外阵面对星空成像时由于恒星距离远,星空的特征使其亮照度并不能使成像阵面饱和,是可以利用这个方法进行计算得到一个新的不变量,即星等差[5]。
同样当n个候选点识别后,这个点就用来作为求解底片常数的点,如果底片常数正确就认为匹配成功。否则就认为这几个点的匹配是误匹配,可以用函数来循环找出正确匹配的点,剔除错误的匹配点。
3 目标识别匹配仿真
本文对拍摄到的一张已做好预处理和目标检测的近红外星空图像进行匹配仿真试验。首先计算原图中目标区域的灰度和,计算目标星等,然后通过构造点对创建另一目标特征量,通过两个目标特征量双重匹配。

图2星图Fig.2The star image
图2是经过预处理后的近红外星图,图3是质心计算后进行标记的恒星图像。文章取获得的恒星中面积大小排名前十的恒星作为导航恒星,而实际应用中只需要三颗即可完成导航,但是为了导航精度,一般采用大于三颗来实现误差的优化。表1中给出了各个导航恒星在近红外星图中的坐标位置,精度达到亚像素级。表中恒星目标坐标为与图3中标号一一对应的坐标数值。
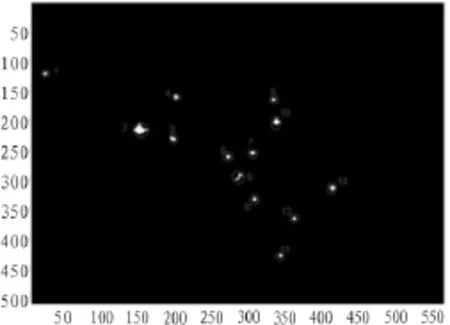
图3 计算标记后的图像Fig.3Labeled targets

表1 恒星目标坐标Tab.1The coordinate of star objects
对于表1中数据采用美国2MASS工程获得的近红外星标作为匹配参考依据,由于数据庞大这里不做例举。首先,利用拍摄平台的指向信息限定星表数据选择区域,从而大量减少数据量;其次,对表1数据和选取星表数据进行模式特征量构造;然后先对待匹配识别恒星进行点对距离模式匹配,减少一部分错误匹配;最后,对匹配的恒星对之间的星等差进行匹配,并验证目标是否在近红外星空望远镜的FOV之内,从而得到精确的匹配与恒星识别,结果如表2所示。
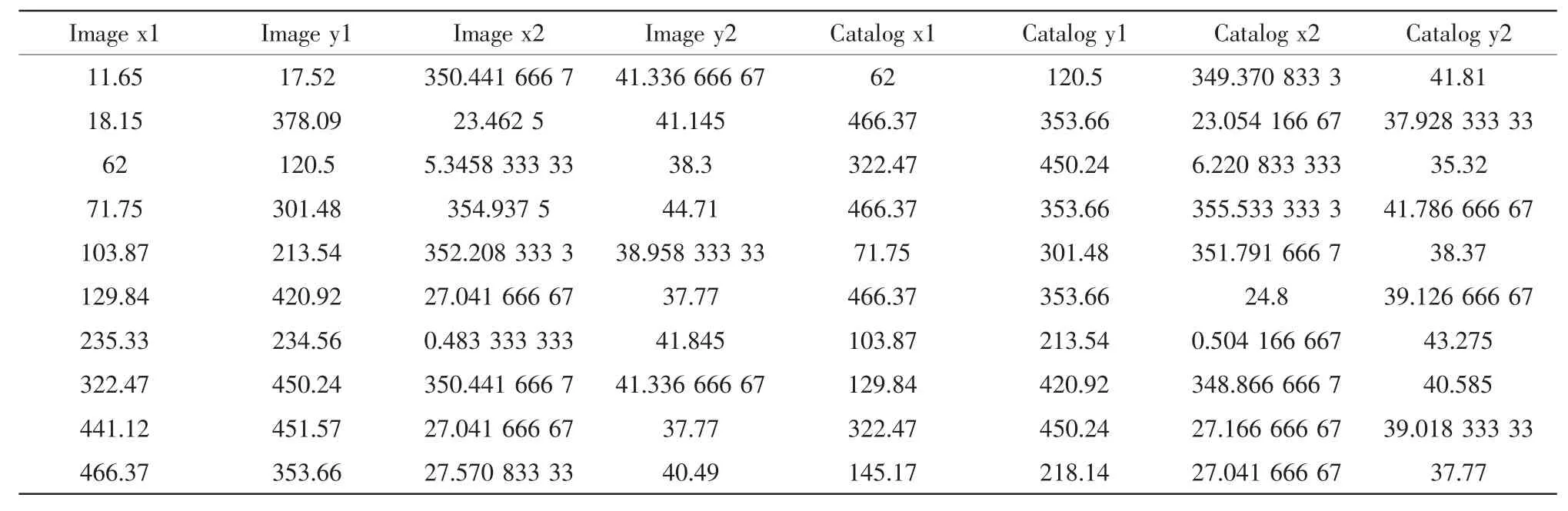
表2 恒星识别结果Tab.2The stars identification results
4 结论
本文对近红外星空图像中恒星的匹配与识别采用美国2MASS工程的全天球恒星数据作为参考,通过利用星传感器的指向信息缩小参考数据的范围,从而减少了计算所需的数据量;恒星点对的匹配与识别是建立在恒星对之上的,文章针对成对恒星匹配的情况,应用了恒星对之间存在星等差的事实,以星等差作为一个匹配模式特征,在完成恒星对基于点对距离匹配的基础上,进一步利用星等差实现恒星之间的参考文献:
精匹配与识别。在后续的实验中发现,该方法具有较好的精度和一定的实用性,具有一定的应用前景。
[1]Pal A,Bakos G A.Astrometry in wide-field survey[J].PASP,2006(118):1474-1483
[2]Tabur V.fast algorithem for matching CCD images to a stellar catalogue[J].PASA,2007(24):189-198.
[3]Edberg S J.International Halley Watch Amateur Observers’Manual for Science Comet Studies[M].Jwt Propulsion Lab,California Inst.Of Technology,1993.
[4]REN Jun-jie.the fast star as the comparison of matching algorithm[D].Guangzhou:Jinan University,2010.
[5]2DAYTIME Stellar imager for attitude determination[P].US 2006/0085130 AI APR.20.2006.
[6]孔兵,王昭,谭玉山.激光光斑的高斯拟合[J].激光技术,2002,26(4):277-278. KONG Bing,WANG Zhao,TAN Yushan.G aussian fitting technique of laser spot[J].Laser Technology,2002,26(4):277-278.
[7]冒蔚,季凯凯,李彬华,等.CCD天体测量学[M].云南:云南科技出版社,2003.
A near-infraed starry image stars identifying method based on star magnitude differ and star point pairs
XIAO Chu-wan,GUO Shao-jun,LI De-dong
(Naval Aeronautical and Astronautical University,Yantai 264001,China)
The star identification is a key technology of near infrared starry-sky image navigation.We can calculate the position of the imaging platform after the identification of at least three stars.The traditional star identification algorithm has a higher redundancy and a poor robustness to noise,so,for more accurate results of identification,in this paper,we designed a method of star matching and identifying based on the two characteristics of magnitude differ and star point pairs.It can bring high accurate of the.
star magnitude;star point pairs;star identification;high accurate
TN219
A
1674-6236(2015)09-0101-03
2014-07-21稿件编号:201407163
肖楚琬(1985—),男,湖南邵阳人,硕士,工程师。研究方向:图像处理、识别,计算机测控。
猜你喜欢
小学生学习指导(高年级)(2024年4期)2024-05-07 03:28:46
汽车实用技术(2022年14期)2022-07-30 06:24:26
数学物理学报(2022年1期)2022-03-16 06:15:00
北京航空航天大学学报(2021年4期)2021-11-24 01:13:12
小学生学习指导(中年级)(2021年4期)2021-04-27 10:14:56
课堂内外(初中版)(2020年5期)2020-06-19 08:11:11
现代装饰(2019年7期)2019-07-25 07:42:20
航天器工程(2014年5期)2014-03-11 16:35:53
华东师范大学学报(自然科学版)(2014年3期)2014-03-11 16:18:15
测绘科学与工程(2013年2期)2013-03-11 15:07:29