
增加船载雷达位置环船摇隔离度方法研究
2015-01-28 08:13:48陈小刚李志坚
电子设计工程 2015年17期
陈小刚,李志坚,季 辉
(中国卫星海上测控部 江苏 江阴 214431)
随着航天事业逐渐向深空进发,我国测量船已加装了国内首套船载X频段雷达。目前安装的船载X频段雷达的主要特点为作用距离远,但波束非常窄,只有0.2°左右。如何保证在船摇扰动情况下,X频段雷达能顺利捕获目标,成为一个需要解决的现实问题。
目前船载雷达中,等待点捕获方法是目标捕获重要手段之一。在等待点捕获过程中,雷达一般工作在位置环的大地手控工作方式,即以大地系为闭环坐标系的一种位置增量控制方式。然而传统的大地手控工作方式船摇隔离度不高,已很难满足X频段雷达目标捕获需求。为了提高设备在等待点捕获目标的概率,需对大地手控进行改进设计。针对以上问题,本文介绍了在大地手控工作方式中加入反馈陀螺和前馈陀螺来提高船摇隔离度的新方法,并从实用角度进行分析验证。闭环,通过位置环PID调节向速度环输出速度指令,控制天线向预期大地角度转动。
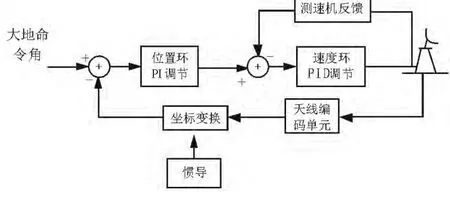
图1 大地手控方式原理图Fig.1 The schematic of themanualmodel of the earth coordinate
1 传统大地手控工作方式介绍
1.1 传统大地手控工作原理
传统船载雷达大地手控工作方式是以大地系为基准坐标系的位置闭环工作方式,其原理如下图1所示。天线编码单元实时检测天线甲板角度,甲板角通过惯导船摇数据进行坐标变换,变换成大地角以后与输入的大地命令角进行位置
1.2 传统大地手控船摇隔离度分析
由于传统大地手控位置环是通过对测角元件测量的甲板角进行坐标变换,然后再与大地命令角进行闭环控制实现,也就是说此种闭环为位置环闭环。这种情况下,船摇信息一般由惯导设备测量并通过网络传输至控制系统。利用船摇角进行坐标变换时,惯导本身的误差及信息传输时带来的时延及位置环闭环自身带来的系统滞后等问会导致在船摇隔离时系统残差比较大,根据以往设备情况,现有大地手控位置环船摇隔离度约为20 db,船摇隔离残差较大,窄波束天线捕获时,目标捕获比较困难。
2 位置环船摇隔离新方法
2.1 反馈陀螺法
为增加系统抗扰动性,考虑在位置环闭环后端加入反馈陀螺进行陀螺环闭环调节。如图2所示。
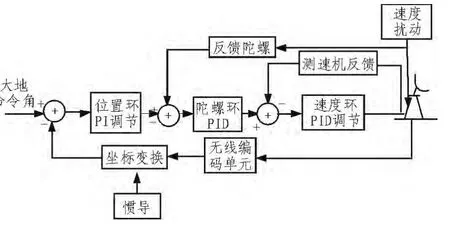
图2 反馈陀螺法原理图Fig.2 The schematic of themethod with feedback gyro
本系统使用反馈陀螺是安装在雷达上分别敏感方位、俯仰运动速率的两个单自由度光纤速率陀螺,它们的测量值分别为方位和俯仰方向上天线运动速度与船摇扰动速度之和。将测得的速度信息负反馈到回路中,通过闭环实现船摇隔离。其结构框图如图3所示。
其中:N:电机至天线的传动比;θi:命令角;θ0:天线实际大地角;f:船摇扰动速度;θ1:天线输出角;θ2:船摇隔离残差。
系统的总隔离度为:L=Lw+LT
此种船摇隔离度是陀螺环船摇隔离度与位置环船摇隔离度之和,因而比单纯位置环的隔离度要高。
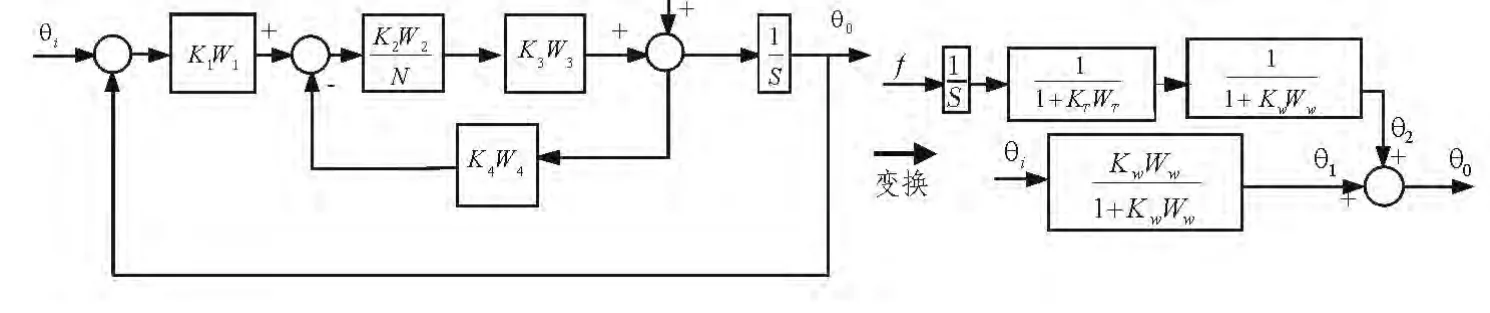
图3 反馈陀螺的位置环框图Fig.3 The transfer function of themethod with feedback gyro
2.2 前馈陀螺法
由于反馈陀螺法中,反馈陀螺的船摇隔离度为LT=20log,隔离度LT的大小取决于KTWT的大小,KTWT越大,则隔离度越大。然而KTWT不能做的很高,且船摇残差θ2是必定存在,且船摇较大时,船摇残差也较大。
因此,在船摇扰动较大情况下,本文介绍了另一种船摇隔离方法:前馈陀螺法,其原理图如图4所示。
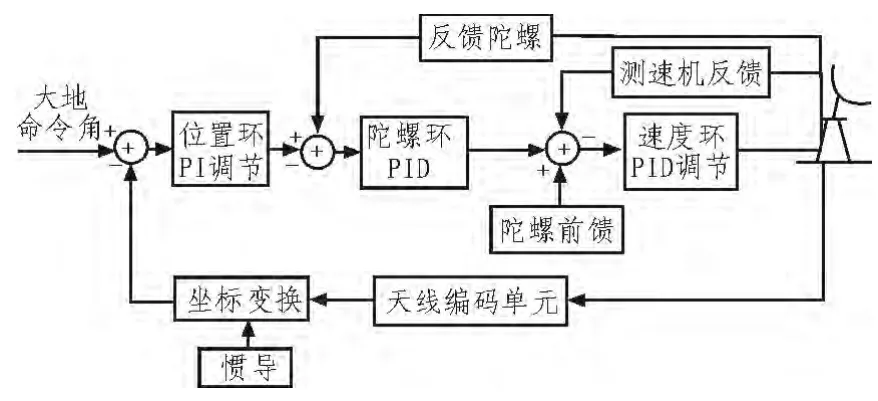
图4 前馈陀螺法原理图Fig.4 The schematic of themethod with feedforward gyro
前馈陀螺与反馈陀螺一致,也是单自由度光纤速率陀螺。与反馈陀螺安装位置不同,可以实现只测量船摇速度在天线方位轴、俯仰轴上分量,其安装示意图如图5所示。
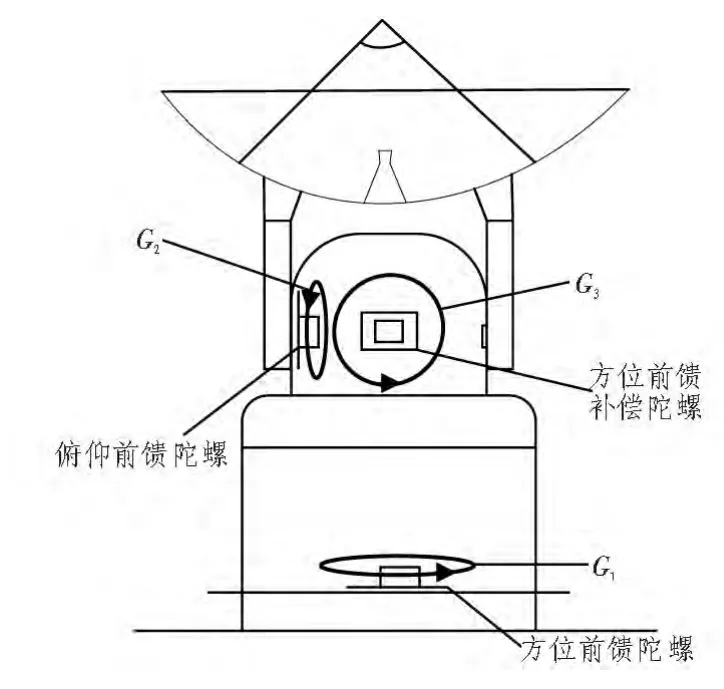
图5 前馈陀螺安装示意图Fig.5 Themounted position of feedforward gyro
图中G1、G2、G3分别表示各个前馈陀螺感应空间的船摇分量。其中G1为方位前馈陀螺感应船首摇对天线方位的影响;G2、G3分别为俯仰前馈陀螺、方位前馈补偿陀螺,主要用于测量在天线转动过程中,横摇、纵摇在天线方位、俯仰方向上的分量。其中G2为船摇在俯仰方向上的分量,G3为横摇、纵摇在天线方位上分量的俯仰角余切分量。设横摇、纵摇在方位上的分量为f′AZ,当前天线俯仰角为 θ,则f′AZ=G3*Tanθ,假设船摇在天线方位、俯仰方向上的分量分别为fAZ、fEL,则:
fAZ=G1+f′AZ,为船摇在天线方位方向上的分量;
fEL=G2,为船摇在天线俯仰方向上的分量。
前馈陀螺应用原理主要是将前馈陀螺敏感船摇在方位、俯仰分量以一定的比例加入伺服驱动速度环的输入端,使天线向减小船摇影响的方向转动,起到隔离船摇扰动的作用。其原理框图如图6所示。
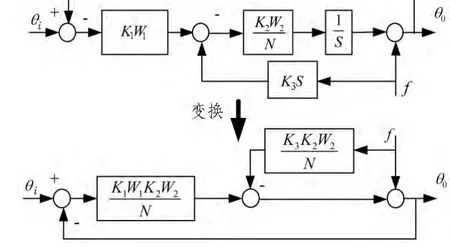
图6 前馈陀螺原理框图Fig.6 The transfer function of themethod with feedforward gyro
图中:K3:前馈陀螺增益补偿至速度环,设前馈补偿隔离残差为 Δf,则
上图表明,船摇f,经过由此可知,理论上船摇扰动f可以完全消除,实际应用中这当然是无法实现的,但是通过合理的调整补偿系数能够较好地消除系统船摇扰动残差。
2.3 试验验证
根据以上理论分析,结合自身天线结构状态及设备参数,对大地方式下设备的船摇隔离度进行了理论评估,评估值如表1所示。

表1 船摇隔离度评估结果Tab.1 The assessment resu lt of the ability of isolating ship shake
通过对船舶生摇,使得船摇角度达到一定条件(方位、俯仰方向船摇大于10°)进行船摇隔离度测试,测试结果如表2所示。
从表格数据可以看出,无论使用反馈陀螺法,还是前馈陀螺法,系统的船摇隔离度都有所提高,而且在船摇较大时同时使用反馈和前馈能够很大程度的提升系统船摇隔离性能。
3 结束语
通过试验分析,验证了本文提出的大地手控方式叠加陀螺提高船摇隔离度方法的可行性。以上提出的船摇隔离度方法能够较好解决窄波束天线在捕获目标时船摇带来的扰动问题。在船摇不大时,单独使用反馈陀螺法就能够拥有较好的效果。在船摇较大时,在环路中叠加陀螺前馈补偿,能够较好的隔离船摇。由于前馈陀螺补偿法为开环输入,容易给系统引进噪声干扰,船摇较小时不建议单独使用,在反馈陀螺故障而船摇较大时,可以应急单独使用。
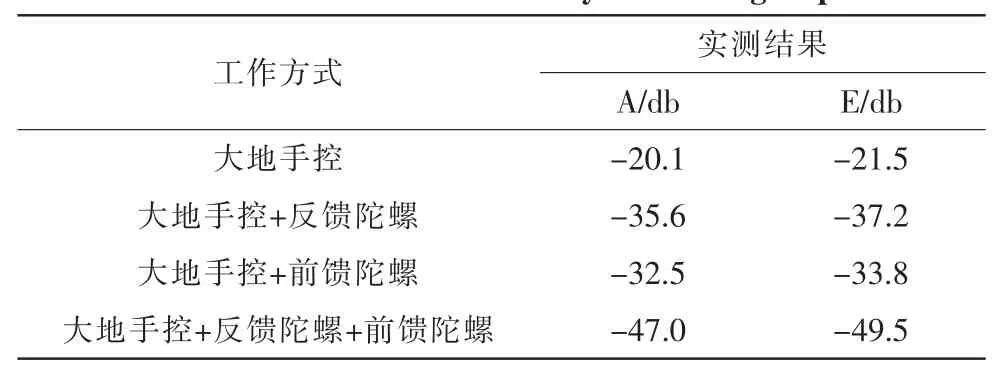
表2 船摇隔离度测试结果Tab.2 The test result of the ability of isolating ship shake
[1]吴伟仁.嫦娥二号工程X频段测控技术[J].中国科学:技术科学,2013,43(1):20-27.WU Wei-ren.Chang’e 2 project X spectrum measurement and control technology[J].Scientia Sinica Technologica,2013,43(1):20-27.
[2]何荣贤,蒋军.大型船载卫通伺服随动系统船摇隔离度[J].陕西工学院学院学报,2005(2):8-10.HE Rong-xian,JIANG-Jun.Marine vibrating isolation of the largemarine satellite communication servo system[J].Journal of Shanxi Institute of Technology,2005(2):8-10.
[3]李志坚,周朝猛,刘咏,等.隔离船摇补偿新方法[J].科学技术与工程,2009(19):5736-5738.LI Zhi-jian,ZHOU Chao-meng,LIU Yong,et al.The new technique of isolation and compensation for ship rock[J].Science Technology and Engineering,2009(19):5736-5738.
[4]陆培国,寿少峻.舰载光电系统高精度跟踪控制技术[J].应用光学,2006(6):476-483.LU Pei-guo,SHOU Shao-jun.High accuracy tracking technology and its application in ship-borne electro-optical system[J].Journal of Applied Optics,2006(6):476-483.
[5]蔡建军,周朝猛,王栋良.船载雷达综合测量精度估算方法及其应用初探[J].飞行器测控,2007(4):19-23。CAI Jian-jun,ZHOU Chao-meng,WANG Dong-liang.Estimation of the compositemeasurement accuracy of ship-borne radars[J].Journal of Spacecraft TT&C Technology,2007(4):19-23.
[6]李连升.现代雷达伺服系统[M].北京:国防工业出版社,2013.
猜你喜欢
九江学院学报(自然科学版)(2022年2期)2022-07-02 02:33:22
幼儿园(2021年12期)2021-11-06 05:10:20
小学生学习指导(低年级)(2019年10期)2019-10-16 08:12:34
数字通信世界(2019年8期)2019-09-03 03:14:22
学生天地(2019年6期)2019-03-07 01:10:46
军事文摘(2018年24期)2018-12-26 00:58:18
快乐语文(2018年36期)2018-03-12 00:56:02
无线电工程(2018年11期)2018-02-13 10:02:32
中国修辞(2016年0期)2016-03-20 05:54:32
幼儿100(2016年28期)2016-02-28 21:26:17
