
应用于航天器微振动信号检测的传感器
2015-01-27 06:36:51崔妮,关咏梅,郭涛
自动化与仪表 2015年9期
在日常生活、工业生产、航空航天、军事等各个领域,振动都是最重要的参数之一。多数航天器存在微振动扰动源,航天器结构上的微振动信号会对航天器的状态及性能产生很大影响,是制约高精度航天器高敏感度和有效载荷的瓶颈。随着我国航天技术的发展,对微振动信号的测试需求越来越迫切[1]。
现有传感器的输出信号多为电压型,易受干扰产生失真,在信号需要远距离传输或使用环境中电网干扰较大的场合,电压输出型传感器的使用受到了限制[2]。而电流输出型传感器可以避免这些问题,有效地提高信号抗干扰能力。因此,本文研制了一种电流输出型传感器,并设计了一个应用于微振动领域的微振动信号检测传感器的信号调理系统。本设计中的微振动传感器主要用于测量各种稳态或低频的低“g”值的振动传感领域,最小分辨率可达0.25 mg。
1 系统总体设计
微振动传感器由微机电系统MEMS工艺电容式加速度敏感元件、滤波电路、放大电路、输出饱和控制电路、及V/I转换电路等构成,其系统框图如图1所示。
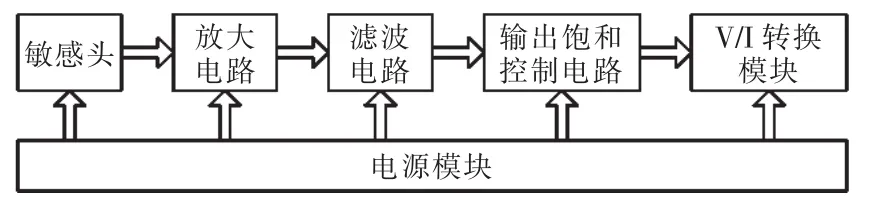
图1 微振动传感器系统结构Fig.1 Structure diagram of system of micro vibration sensor
当敏感元件感受到加速度信号时,将其转化为电压信号,经过放大、滤波后再经过V/I转换电路把电压信号转换为电流信号,最终输出电流信号。微振动传感器的测量范围可以通过选择电容式MEMS加速度敏感头的量程来解决,频率响应通过调节滤波电路的滤波电容来完成。传感器的输出异常时,输出饱和控制电路能保证其最终信号输出在技术指标规定的范围内。
1.1 传感器选型
传感器敏感元件的性能优劣会直接影响采集信号的准确性。微振动信号频率低、幅值小,采用普通的测量手段和仪器测试时,真实信号往往会混杂在噪声中,对进一步的数据处理和分析造成困难,甚至导致错误结论。通过对比和反复试验,最后选用了SILICON DESIGN公司研制生产的1221系列电容传感器1221L-010。此型号传感器体积小、噪声低、灵敏度为200 mV/g,是普通传感器的50~100倍,具有从直流开始的极低频率响应特性,能对超低频信号进行正确、准确的测量。而且电容式传感器的选取兼顾了对微振动信号低频性能的测试能力,频率响应为0~1000 Hz,频响范围可以达到零频。
1.2 信号调理模块部分电路设计
信号调理模块对传感器的输出信号进行处理,主要是低通滤波、信号放大、零位提升、输出饱和控制等。
1.2.1 滤波电路设计
航天器在飞行时不只是存在微振动信号,例如火箭和导弹在飞行过程中,由于发动机点火、机体分离、空气动力等因素,也会引起结构的振动,这些信号对待检测信号的判别造成相当大的困难。微振动传感器在工作时除了要识别需要检测的信号外,还必需能够剔除频率相对较高的振动和冲击信号。由于微振动信号相对其他干扰信号为低频特性,因此,滤波电路采取低通滤波方式对信号进行处理,剔除加速度信号中的高频干扰成分。如图2所示为低通滤波电路,频率响应为0~100 Hz,具有零频响应。
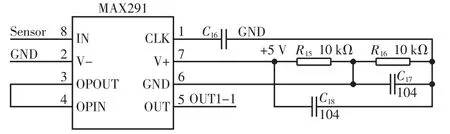
图2 低通滤波电路Fig.2 Low-pass filter circuit diagram
滤波芯片采用美信(MAXIM)公司的MAX29X系列开关电容滤波器MAX291,它为巴特沃兹(Butterworth)型滤波器,此种滤波器增益稳定、波动小,主要用于仪表测量等要求整个通频带内增益恒定的场合,符合电路设计的初衷。
MAX291既可用外部时钟也可用内部时钟作为控制截止频率的控制时钟。图2中的电路连接方式是采用外部时钟控制截止频率的方式。截止频率取决于时钟的频率,本系列电路只需外接一个电容器,内部时钟振荡电路就能开始工作,而无需再从外部引入时钟信号。Cosc用来调整截止频率,计算公式为
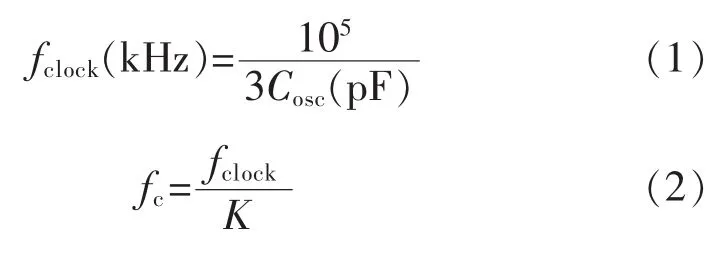
式中:fclock为时钟频率;fc为滤波器的截止频率;K为时钟频率和截止频率的比率,对于MAX291,K=100。微振动信号频率为0~100 Hz,经过计算与实际电路调试,确定Cosc的容值为3333 pF。
在TIRA传感器校准系统上对此信号调理电路进行振动扫频试验,电路输出信号与B&K的标准传感器8305的输出信号进行对比,得到如图3所示 TIRA传感器校准系统试验扫频曲线。由图3可以看出,信号经滤波后,在通频带内的带内不平度较小,符合设计要求。
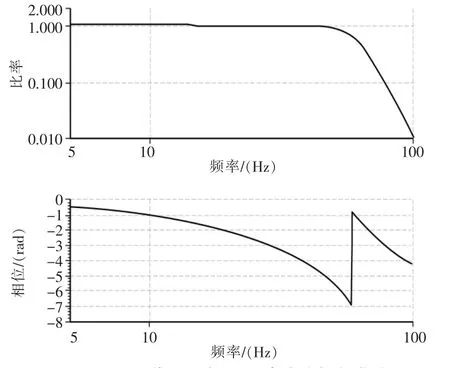
图3 TIRA传感器校准系统试验扫频曲线Fig.3 TIRA sensor calibration system test sweep curve
1.2.2 放大电路设计
1221加速度计敏感元件满量程输出范围是0.5 V~4.5 V,而下一级V/I转换电路的输入参考信号要求为0~5 V直流电压信号。所以,需要对原始的信号进行适当的调理,将敏感头输出的0.5 V~4.5 V电压信号变换为0~5 V的直流电压信号。
具体信号调理原理为首先需要将电压范围调到-2 V~2 V,然后放大1.25倍,再零位提升2.5 V,得到的电压变为0~5 V。
放大电路中的运放芯片采用的是德州仪器的仪表运放AD623。放大模块电路图如图4所示。
AD623的放大倍数计算公式为

将G=1.25代入,计算得RG=400 kΩ,实际调试选用510 kΩ的精度为1%的金属膜电阻。
仪表运放AD623既可以完成放大功能,又可以对电压进行零位提升。如图4所示,在AD623的输出基准端5引脚处外接2.5 V的基准电压VREF,这样输出电压就被调理到了0~5 V。
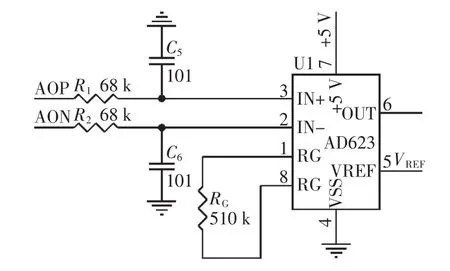
图4 放大电路及零位提升电路Fig.4 Amplifying circuit and zero voltage lift circuit
1.2.3 输出饱和控制电路
在微振动传感器调理电路的输出端使用BWB5V6(5.6 V)的稳压二极管进行箝位,当输出电压小于9 V时,输出箝位二极管BWB5V6可以箝位在5.6 V,当输出电压在15 V时,其箝位输出不大于6.2 V,可以满足异常情况下,传感器输出不大于6.2V的规定,防止输出电压过大损坏元件。输出饱和控制电路如图5所示。

图5 输出饱和控制电路Fig.5 Output limiter circuit
1.3 V/I转换模块
V/I转换模块选用德国Analog Microelectronics公司生产的电压-电流转换器AM442。它不仅能通过二线制方式将输入信号转换成标准的4~20 mA电流信号,而且也能通过三线制方式输出0/4~20 mA的电流信号。它的工作电压范围宽达6~35 V,工作温度范围为-40℃~+85℃[3]。
选用AM442的二线制方式。图6为二线方式输出应用电路图。在二线方式输出时,管脚1(VCC)和管脚2(RS-)相连。输出增益系数由外接电阻R15和R16来调节。对于二线输出方式,在输出电流范围为4~20 mA时,如果输入电压VIN的范围为0~5 V,6引脚不接,那么,外接元件的数值根据如下公式计算:
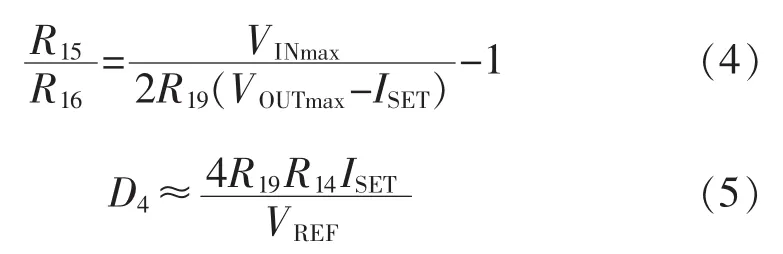
式中,偏置电流ISET是作为输出偏置电流,即输出最小电流。
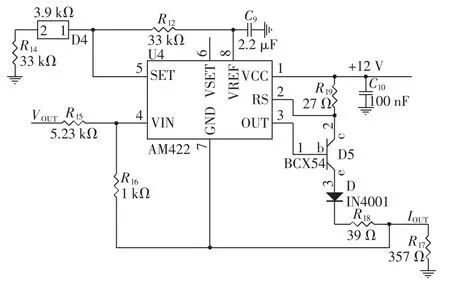
图6 V/I转换电路设计Fig.6 V/I converting circuit design
1.4 电源模块
系统中AM422需要在6~35 V电源供给下工作,其他的芯片包括敏感头1221,以及MAX291、AD623均可在5 V电源下工作,所以选用12 V为系统供电,用转换电压芯片LT1761-5.0得到5 V电压。查询主要器件耗电电流,2个LT1761-5.0并联,完全有能力为整个系统供电。供电模块前后级均使用钽电容配合贴片陶瓷电容进行滤波,使得电路板尺寸更小,电源抗噪声能力增加,系统寿命更持久。
2 测试结果
2.1 V/I转换电路标定
对V/I转换电路进行标定,表1是0~5 V电压转换为4~20 mA电流的实验值与理论值的对照表。
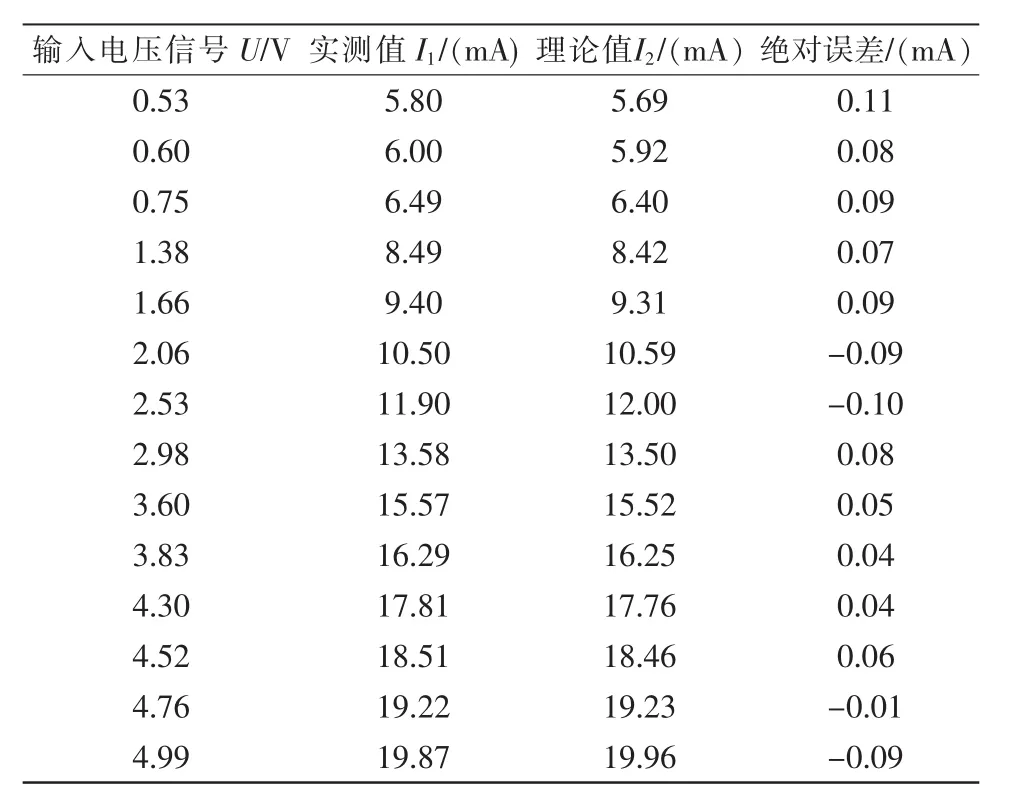
表1 实验值与理论值对照表Tab.1 Table of experimental and theoretical values
对表1数据进行origin拟图得到实测值与理论值曲线图,如图7所示。

图7中实测值与理论值非常接近,满足设计要求。
2.2 系统整体标定
系统整体标定设备采用LXJ-70型精密离心机,它能提供0.1 g~80 g的加速度信号,改变传感器的安装方向,可以完成正负加速度的标定工作[4]。
根据采集到的电流值计算加速度值,并计算实测值与理论值进行对比,进行精度计算,精度计算公式为
通过计算得到精度约为0.91%,说明电流输出型微振动传感器的信号调理系统能够准确测量超低频微振动信号,并且测试精度很高,未来可应用在各种测量稳态或低频的低“g”值的振动传感领域。
3 结语
新技术的不断出现为更好地监测航天器微振动环境,提高航天器有效载荷使用效率,改进航天器设计和合理安排微重力科学实验发挥了重大作用[5]。微振动传感器已经被应用在实际工程中并取得了很好的效果。电流输出型微振动传感器主要应用于各种测量稳态或低频的低“g”值的振动传感领域。如直升机和飞机试验、高铁技术(如转向架监测与振动)、汽车测试与碰撞试验、运输振动测试、结构监测(桥梁、房屋建筑健康监测)等。
[1]张振华,杨雷,庞世伟.高精度航天器微振动力学环境分析[J].航天器环境工程,2009,26(6):528-534.
[2]牛余朋,朱洪升,朱正斌.电流传感器应用技巧[J].电子制作,2011(5):72-75.
[3]沈国伟.电压电流转换接口AM442原理及应用[J].国外电子元器件,2003(8):50-53.
[4]鲍爱达,闫明明,徐晓辉,等.基于VFC的超低频振动信号采集系统设计[J].电子技术应用,2013,39(12):75-78.
[5]赵伟.航天器微振动环境分析与测量技术发展[J].航天器环境工程,2006,23(4):210-214.
猜你喜欢
国际太空(2022年7期)2022-08-16 09:52:50
今日农业(2021年19期)2021-11-27 00:45:49
数学小灵通·3-4年级(2021年9期)2021-10-12 05:47:46
基层中医药(2021年5期)2021-07-31 07:58:24
小学生学习指导(低年级)(2020年10期)2020-11-09 09:21:58
今日农业(2020年13期)2020-08-24 07:35:28
国际太空(2019年9期)2019-10-23 01:55:34
国际太空(2018年12期)2019-01-28 12:53:20
今日农业(2019年16期)2019-01-03 11:39:20
国际太空(2018年9期)2018-10-18 08:51:32
