
基于降阶ESO的电动舵机非奇异终端滑模控制
2015-01-27 05:04:36
自动化与仪表 2015年11期
(北京理工大学 宇航学院,北京 100081)
线性比例电动舵机是导弹、无人机等飞行器的飞行控制系统中重要的组成部件,同时也是高精度位置跟踪伺服系统。电动舵机的负载会随着飞行条件的变化而变化,呈现出强时变的特性[1]。舵机系统内部摩擦和间隙是影响舵机系统静、动态性能的重要因素[2],其非线性特性将导致系统跟踪误差增大,严重制约了舵机控制系统性能的提高。因此,必须采用适当的补偿方法抑制系统内部参数时变和外部负载扰动的影响,以提高系统的跟踪性能。
通过2种途径可以提高电动舵机系统的抗干扰能力:一种是从反馈控制器的角度,设计非奇异终端滑模控制器,系统将在有限时间内稳定,特别是在平衡点具有更好的收敛性能且不抖振;另一种是从前馈主动补偿的角度,设计观测器将干扰直接观测出来,并进行前馈补偿。文献[3]采用自适应非奇异终端滑模实现对电动舵机的控制,收敛性能较好,但只能估计出有界的参数摄动;文献[4-5]采用扩张状态观测器ESO观测系统状态及外部干扰,获得了良好的跟踪性能,但未提高跟踪误差的收敛速度。
本文将降阶ESO前馈补偿和非奇异终端滑模控制相结合,应用在线性电动舵机的控制中。不仅提高了系统的抗扰动能力,并实现了电动舵机的角度稳定控制和跟踪误差的有限时间收敛,提高了系统的动态性能。
1 电动舵机的模型
由于弹上空间和冲击过载的限制,线性电动舵机采用如图1所示的传动机构。同时,电动舵机一般由直流无刷电机、传动机构、位置传感器、驱动器和控制器组成。
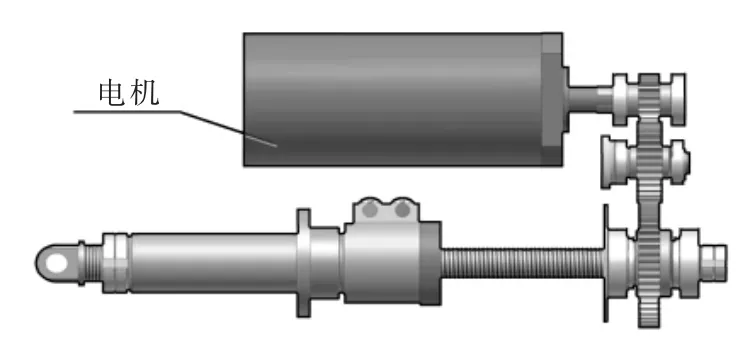
图1 电动舵机传动机构Fig.1 Structure diagram of EMA
电动舵机力矩平衡方程为

式中:J,f,KA分别为系统等效到舵机输出轴的转动惯量、系统总的阻尼系数、力矩系数;ML,Mfn分别为负载力矩、非线性摩擦力矩;Md为系统总的干扰力矩;δ为舵偏角。
系统负载力矩中包括弹性负载和常值负载:

系统中的非线性摩擦力矩Mfn可以采用Stribeck模型描述,在这里采用连续函数去逼近[6]:

式中:kf>0,当kf足够大时能以足够高的精度逼近Mfn。
对模型进行变换,令x1=δ,x2=δ˙,则由式(1)~式
(3)可得:
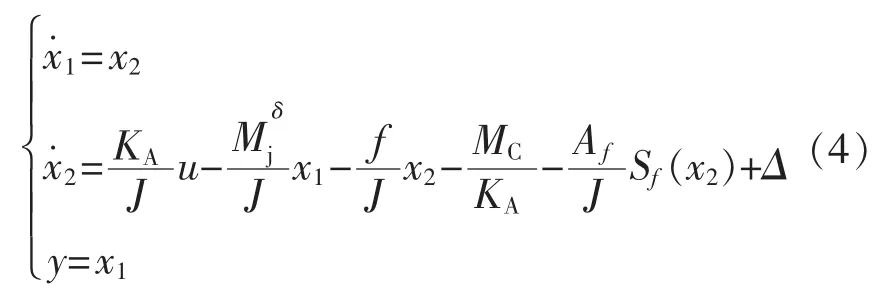
式中:Δ为系统干扰及未建模动态。
将式(4)转换为如下的标准形式:
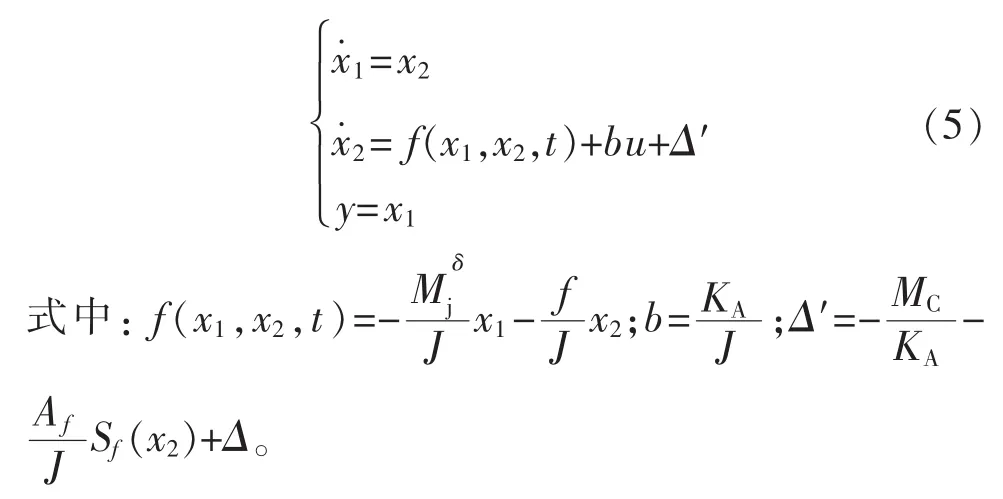
本文研究的问题为设计一个控制器,使得系统(4)的输出y对有界期望轨迹xd的跟踪误差有限时间收敛,并实现对外部干扰及未建模动态的实时估计。
2 复合控制器的设计
2.1 非奇异终端滑模控制器设计
定义系统的跟踪位置误差和速度误差分别为e1
设计如下的滑模面为

对式(5)求导可得:

根据如下滑模到达条件:

选取如下的趋近律:

式中:k>0,σ>0,0<η<1。该趋近律能够保证系统(4)的跟踪误差以有限时间收敛到滑模面s的邻域内。
由式(5)、(7)和(9)可以知控制律为

由式(10)可以看出:负载力矩、惯性扰动、摩擦阻尼和未建模动态所造成的扰动都可以在d(t)中得到体现。把扰动观测出来并加以补偿后,电动舵机系统就变为二阶积分串联系统。因此,如何快速估算出d(t)的值是控制器设计的关键。
2.2 降阶ESO的设计
根据文献[7]提出的线性扩张观测器LESO的思想,由于x1可以直接测量,可以采用如下形式的降阶ESO估计出式(5)中干扰及不确定项:

式中:β1为观测器的增益,可以采用带宽配置的方法选择观测器增益;b0为b的估计值。
上述观测器可以看作为基于模型的降阶ESO,当把系统模型f(x1,x2,t)和Δ′看作系统的总干扰时,降阶ESO的形式和文献[8]是一致的。
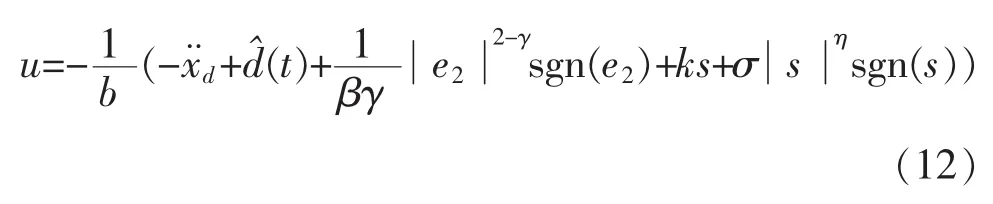
此时,将系统“总干扰”估计值代入控制量(10)中可得:
3 闭环系统稳定性分析
为了说明闭环系统的稳定性,首先给出如下的假设和定理。
假设1假设d(t)是有界的并存在一个常数M>0,则有:

定理1若假设1满足,且合理选取观测器增益β1,那么观测器误差e0指数收敛并有界,且收敛域为[8]

式中:we为观测器带宽。
接下来考虑在降阶ESO(11),滑模面(6)与控制律(12)作用下的闭环系统的收敛特性。
针对系统(5)构造如下的正定Lyapunov函数:

对式(15)按时间t求导可得:


式中:0<ζ0<1。同时,有限收敛时间可以表示为

综上所述,在观测器稳定的前提下,通过调节控制律(12)中的参数k,σ,可以保证系统的轨迹有限时间收敛于s=0的邻域p内,即状态量x1将在有限时间内跟踪上期望值x1d,但是存在稳态收敛误差。稳态收敛误差的收敛域与系统观测器的观测误差成正比。但是,观测器的带宽将增大,引入的观测噪声会降低观测器的估计能力,应合理的选取观测器及控制器参数。
4 仿真结果与分析
为了验证所提电动舵机复合控制方法的有效性,对2种控制方法:自适应非奇异终端滑模控制(CANTSMC)和基于降阶ESO的非奇异终端滑模控制(TSMC+RESO)在电动舵机系统的应用做仿真比较。仿真时电动舵机的参数为Nm/rad;Mc=4.12 Nm;f=9.12 Nm(rad/s)-1;KA=28.23 Nm/V,系统干扰可以表示为

期望的参考轨迹x1d=0.2sin(2πt)rad,仿真时电流限幅-20 A~20 A,采用ODE4仿真算法,仿真时长为10 s,仿真步长为0.001 s。控制器参数分别为
1)CANTSMC控制器参数为

2)TSMC+RESO控制器参数为

采用TSMC+RESO控制方法时电动舵机舵偏角跟踪曲线如图2所示。由图2可知,系统舵偏角输出具有良好的跟踪性能,同时具有良好的抗干扰能力。
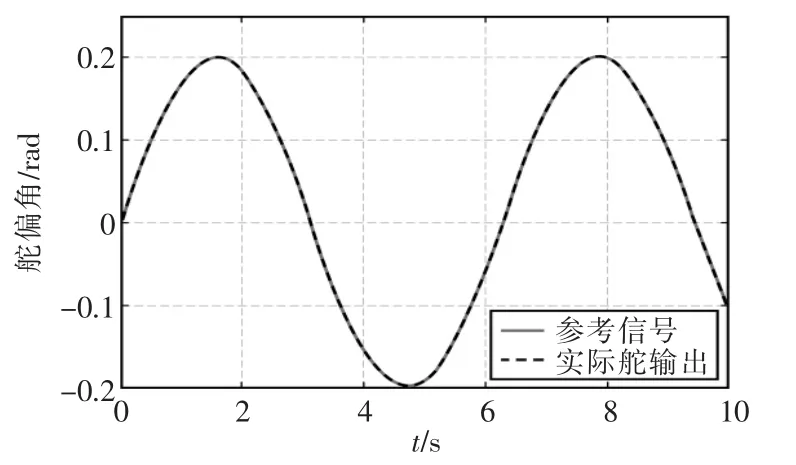
图2 舵偏角跟踪曲线Fig.2 Output x1follows desired trajectory yd
同时2种控制方法对比,舵偏角跟踪误差曲线如图3所示。由图3可知,本文提出的控制方法具有更小的跟踪误差,且误差收敛速度接近。但是,采用观测器估计系统不确定性,进一步降低了控制器设计的保守性,并减少了控制参数。在图4中,TSMC+RESO具有更小的控制量,同时消除了抖振。
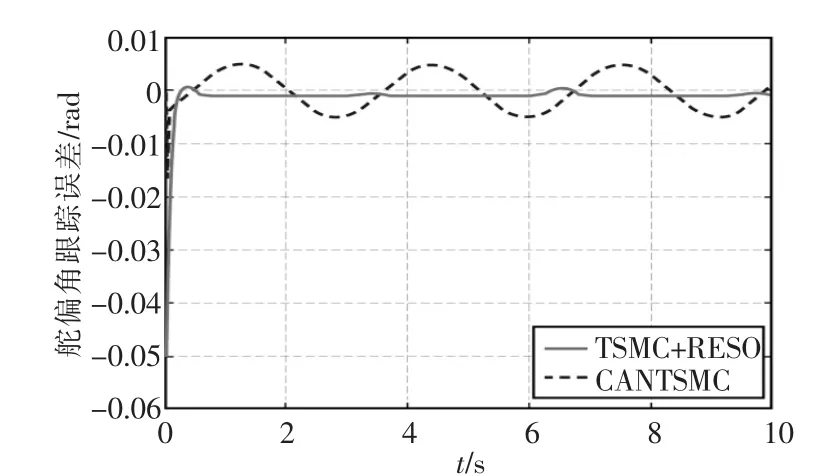
图3 系统跟踪误差曲线Fig.3 Tracking error of the system
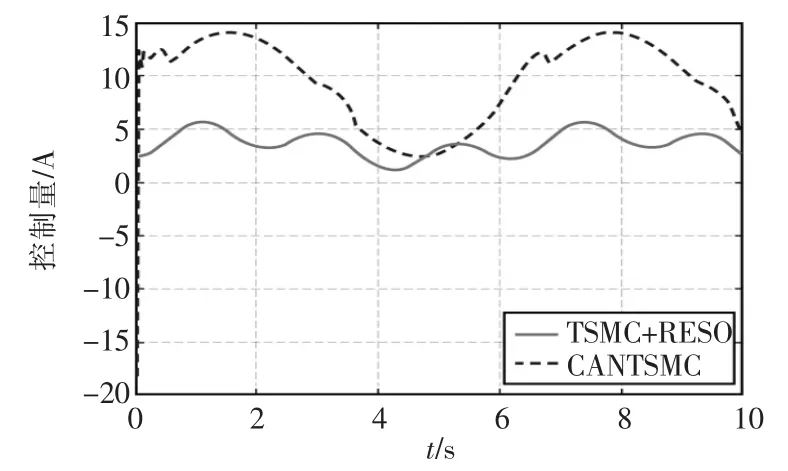
图4 系统输出控制量曲线Fig.4 Control effort of the system
根据文献[3]中的定义和方法,采用自适应方法估计系统参数的摄动,而本文采用观测器不仅估计了系统内部的参数摄动,同时也估计了系统的干扰以及未建模动态。下面考察观测器的估计能力,观测器增益β分别为10和20,观测器的观测误差曲线如图5所示。
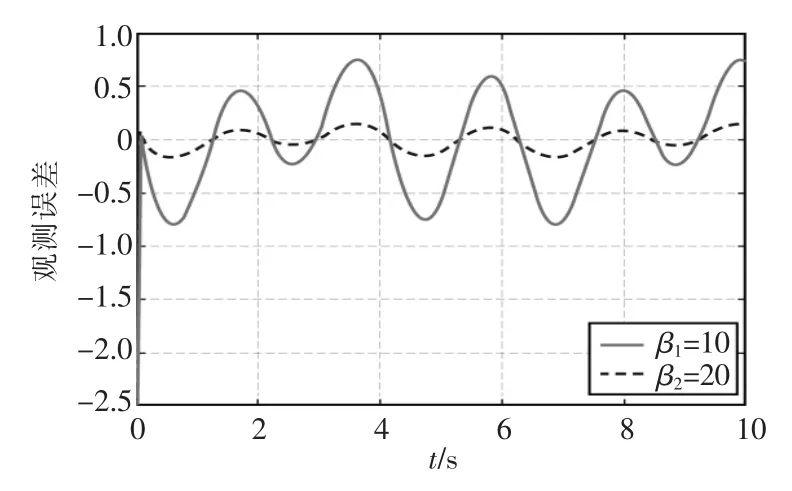
图5 观测器观测误差曲线Fig.5 Estimated error of the RESO
由图5可知,随着观测增益的增大,观测误差减小,与定理1中的结论是一致的。同时,观测器的增益不能任意增大,当观测器增益增大会引入观测器噪声,降低观测器的性能。
5 结语
本文针对线性电动舵机的精确跟踪问题,设计了基于降阶ESO的非奇异终端滑模控制方法。首先,降阶ESO用来估计系统“总干扰”,并将估计值主动补偿到输入端;其次,非奇异终端滑模控制保证系统跟踪误差有限时间收敛。此外,对闭环系统的稳定性进行了分析,给出了误差收敛域,为控制参数选取提供了理论参考。最后,通过对比仿真验证了该方法的有效性。
[1] 吴森堂,费玉华.飞行控制系统[M].北京:北京航空航天大学出版社,2005.
[2] 彭书华,李华德,苏中.非线性摩擦干扰下的电动舵机滑模变结构控制[J].信息与控制,2008,37(5):127-130.
[3] 李浩,窦丽华,苏中.电动舵机的复合自适应非奇异终端滑模控制[J].控制理论与应用,2011,28(8):75-79.
[4] 夏长亮,刘均华,俞卫,等.基于扩张状态观测器的永磁无刷直流电机滑模变结构控制[J].中国电机工程学报,2006,26(20):139-143.
[5] 熊官送,那学智,曹东海.自抗扰控制技术在电动舵系统中的应用[J].导航定位与授时,2014,1(3):42-46.
[6] H.Olsson,K.J.Astrom,et al.Friction models and friction compensation[J].European Journal of Control,1999,10(2):1243-1254.
[7] Gao Z Q.Scaling and bandwidth-parameterization based controller-tuning[C]//Proceedings of the 2003 American Control Conference,Denver,IEEE 2003:4989-4996.
[8] 薛文超.自抗扰控制的理论研究[D].北京:中国科学院数学与系统科学研究院,2012.
猜你喜欢
应用数学(2020年4期)2020-12-28 00:36:52
自动化学报(2019年6期)2019-07-23 01:18:36
电子制作(2018年1期)2018-04-04 01:48:14
制造业自动化(2017年2期)2017-03-20 14:26:08
铁道科学与工程学报(2015年5期)2015-12-24 12:12:08
深空探测学报(2015年3期)2015-12-07 11:15:06
电源技术(2015年11期)2015-08-22 08:50:58
空间控制技术与应用(2015年2期)2015-06-05 12:24:55
航空学报(2015年4期)2015-05-07 06:43:34
电测与仪表(2015年19期)2015-04-09 11:32:56
