
地铁输电接触轨动态检测系统设计与研究
2015-01-27 05:04:45
自动化与仪表 2015年11期
(天津中德职业技术学院 电气与能源学院,天津 300350)
目前,地铁是缓解城市交通压力、减少噪音与空气污染、实现绿色出行方式的主要手段。地铁运行安全事关重大,因此地铁生产和运营单位对地铁运行及相关设施的检测越来越重视。地铁输电接触轨作为地铁运行中的供电通道是保证地铁运行的关键部件。
下接触式地铁输电接触轨(简称“第三轨”)最大截面积约0.01 m2、单根长度约15 m,90~120 m为1个铆段,每个铆段两端接触轨与支架固定联结形成2个铆结,每个铆段的正中间是1个膨胀接头,其他位置是间隔约5 m的活动头支架。由于输电接触轨长径比较大,受自身结构、变形、外力干扰等因素影响,在地铁长期运行中会出现严重变形,阻碍集电靴的正常运行,从而造成严重事故。为此,对输电接触轨变形状态的检测成为地铁运营公司每天必行的检测内容。
目前,对地铁输电接触轨的检测主要有2种方式,一种是每天在地铁停止运行后的有限时间内(约4 h)对输电接触轨进行人工检测[1],主要检测参数是输电接触轨支架是否变形以及受流面直线度,检测手段主要是依靠人的视觉;另一种是地铁停运后利用地铁综合检测车检测走行轨的同时对输电接触轨进行检测,其主要检测相邻走行轨内侧与接触轨受流面水平和垂直方向的距离,实时读取检测数据,但检测数据不记录、不存储,无法实现离线分析和预测。第一种人工检测方法完全凭人工感觉,除非有明显异常才能比较有把握的确定[2],效率低、精度差,占用劳动力较多、检测速慢,检测速度最多为3 km/h[3];第二种综合检测车检测方法,通过检测输电接触轨受流面中心到走行轨的水平距离以及受流面到走行轨顶面的垂直距离来反映输电接触轨的状态[4],但事实证明当该参数出现问题时,其根本原因还是输电接触轨支架变形所至。
本项目的关键创新点是找到了输电接触轨变形的首要因素,并有针对性地进行检测,该检测功能可独立使用,也可植入地铁综合检测车。本文对支架形态检测原理、方法及实现技术关键点进行论述。
1 总体方案设计
大量现场案例反映,导致输电接触轨故障的最关键因素是其支架卡死,输电接触轨纵向调整的自由度受限,随着输电接触轨的伸缩变形首先显现的是支架变形,支架变形到一定程度方体现在输电接触轨受流面中心到走行轨的水平距离以及受流面到走行轨顶面的垂直距离产生变化。支架变形的最初表现是支架左右倾斜,继而导致支架损坏,因此若能在支架变形初期尽早发现问题,对输电接触轨维护具有非常重要的意义。
本检测系统的基本设计思路是利用一台搭载检测传感器的检测车对接触轨支架的状态和受流面垂直面内直线度进行自动检测和故障预测,具体可检测和显示支架垂直度和受流面垂直面内直线度、超差值、故障位置等参数,并可实时记录所有检测点历史数据,可实现离线查询和预测分析。检测车采用电驱动,可在检测车行进过程中实现动态检测,检测臂可伸缩,适合常用地铁走行轨,走行速度可调,最高可达到15 km/h。下接触式地铁输电接触轨形态检测装置示意图如图1所示,主要包括检测装置、驱动系统、电源系统、编码器传动机构、检测臂、行走传动机构和车身本体等部分。
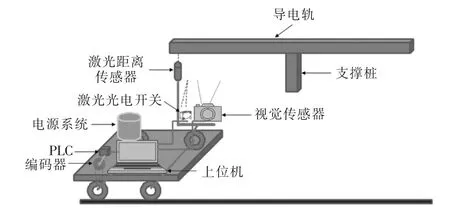
图1 下接触式地铁输电接触轨形态检测装置Fig.1 Shape detecting device for under contact subway transmission rail
检测装置包括编码器、激光光电传感器、视觉传感器、激光测距传感器、上位机及检测软件等。当检测车以某一速度沿地铁走行轨移动时,光电触发传感器遇支架侧壁发出触发信号直接触发视觉传感器采集支架垂直度形态的图形数据,通过以太网传至上位机,并存入历史数据库;与此同时,激光测距传感器每隔500 mm读取一组接触轨受流面垂直面内直线度数据,检测数据通过A/D模块传至可编程序控制器;编码器通过同步齿形带与行走机构前轴连接,用来记录行走机构的位移,编码器信号通过高速输入口传至可编程序控制器。可编程序控制器装在控制箱内,通过RS232接口与上位机相连,将可编程序控制器的数据传至上位机实时数据库,实时数据库的数据在上位机内可存入历史数据库。检测系统原理框图如图2所示。
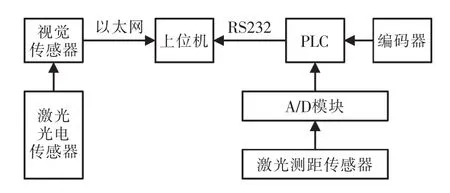
图2 地铁导电轨检测系统硬件框图Fig.2 Structure diagram of subway transmission rail detection system
行走机构沿走行轨运动时,编码器记录行走机构的行走位移;激光测距传感器实时读取距离接触轨受流面的距离,获取接触轨形态数据,即直线度数据,上传至上位机实时数据库,上位机判断直线度超差则给出报警提示,并通过编码器计算位移,记录下超差的位置,这一过程能检测接触轨连接处是否有 “错位”;激光光电开关在限定距离内感知“支撑桩”位置,碰到“支撑桩”侧壁后发出触发信号,该信号直接触发视觉传感器实时采集“支撑桩”图形信息,与标准模型数据比较,判断是否异常,出现异常则报警提示,并通过编码器计算位移,记录“异常”位置;同时视觉传感器采集的实时数据通过以太网通信方式向上位机提供;上述实时数据均存入历史数据库,以进行离线分析,离线分析可在上位机中查询任意区域和某一时刻接触轨受流面的直线度以及任意“支撑桩”在某一时刻的图像数据,以进行历史状态比较和趋势分析,实现状态预测诊断和维护。
2 基于视觉传感器的输电接触轨支架状态检测和数据处理
本检测装置的关键技术是输电接触轨支架的识别、读取和数据处理,选择合适的视觉传感器及检测方法决定了检测装置的性能。
2.1 视觉传感器的选择与图像识别方法
本检测系统搭载的检测车设计最高运行速度15 km/h,以两支架最近距离4 m计算(一般为5 m),检测车以15 km/h速度通过两支架间的时间约为1 s,这样需每秒钟完成1个支架的检测、运算、处理和存储。经试验比较,对输电接触轨支架的识别选用OMRON智能视觉传感器FZ-SLC15,配置高性能控制器FZ4-H 115型。视觉传感器识别速度小于0.25 s,快门速度最大可达1/30000 s,图像读取时间12.5 ms,垂直度图像检索处理时间小于10 ms,数据存储时间小于30 ms,满足检测时间周期的要求。
智能视觉传感器在外部激光光电开关的触发下,进行图像采集,从输入图像中搜索出与要查找的标记模型最相似的部分,并高速检测相关值(相似度)和位置。该搜索的方法即为将测量物的特征部分登录为图像模型,然后在输入图像中搜索与模型最相似的部分,并检测其位置。可输出表示相似程度的相关值、测量对象的位置及倾斜度。
本项目中智能视觉传感器执行测量的处理项目的设定方法采用“形状搜索+”,使用重视轮廓信息的模型,即使存在照明的阴影、工件本身形状的个体差异、姿态变化、干扰重叠、遮掩等环境变化因素,也可稳定、高速、高精度地检测出。视觉传感器“形状搜索+”的设定流程如图3所示。
模型登录将测量图像的特征部分作为模型登录。模型参数可根据需要变更,以适应不稳定的测量结果或提高处理速度。
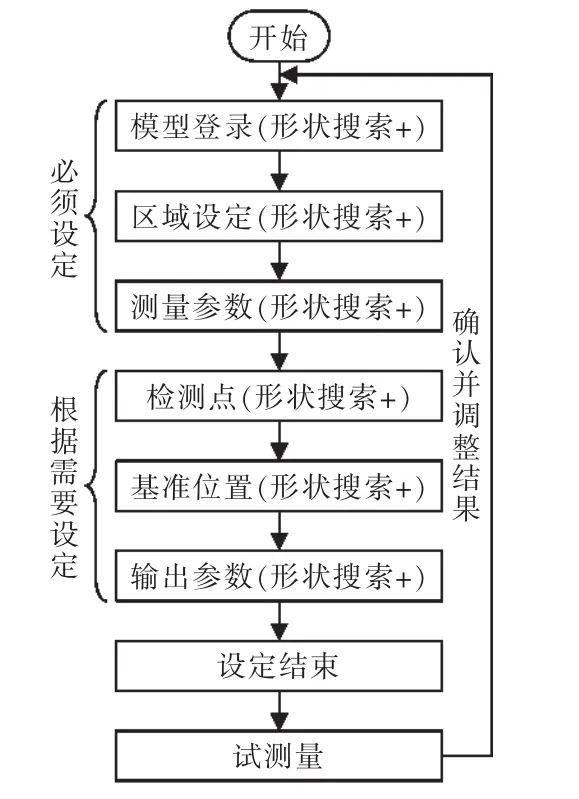
图3 视觉传感器“形状搜索+”的设定流程Fig.3 Setting flow chart for shape search function of vision sensor
区域设定设定要测量的范围,通过限制测量区域,可在短时间内进行正确测量。
检测点指定在测量时想将模型的哪个部分作为坐标检测出。通常将已登录模型的中心位置登录为检测点坐标。
基准位置通常将已登录区域的中心位置登录为基准位置。
测量参数设定测量结果的判定条件。指定相关值、分类方法和标签编号。
输出参数选择输出参数,设定如何处理坐标。
2.2 “输电接触轨”支架图像采集控制
2.2.1 不抖动拍摄“支架”设置
本检测系统为视觉传感器快速移动,被摄物体不动,因此拍摄时不抖动一方面要从机械结构解决,另一方面从传感器功能解决。这里通过缩小快门速度,在HDR模式下将亮度值降低,由于地铁环境比较灰暗,需要启动亮度补偿模式。
HRD模式亮度与快门速度调整结果如图4所示,亮度补偿模式开始的时序图如图5所示。
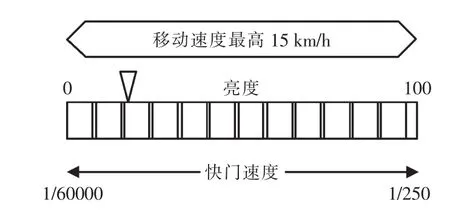
图4 HRD模式亮度与快门速度调整结果Fig.4 Adjustment result of brightness and shutter-speed in the HRD mode
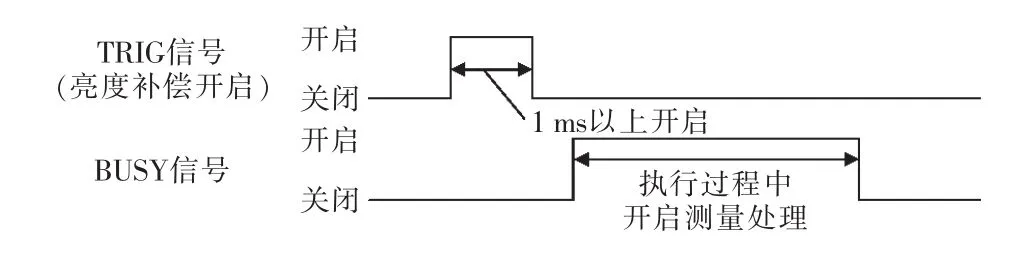
图5 亮度补偿模式开始的时序图Fig.5 Timing chart for the beginning of brightness compensation mode
2.2.2 触发器输入和拍摄时间
为在正确时间和位置对支架进行拍摄,需在支架到达视觉传感器正前方位置的瞬间进行拍摄。这里选择的视觉传感器具有触发延迟功能,可在接受触发信号(TRIG)后延时拍摄,但因检测车运行速度不确定,系统需计算车体运动速度与延时时间的关系,需占用系统CPU较多,且运算速度在触发位置和拍摄位置距离较近时可能无法满足需求,故采用机械可调式结构来完成触发和拍摄之间的协调,具体方案是将支架识别传感器与视觉传感器并排安装,距离可调,当支架识别传感器识别到支架有效信号时直接触发视觉传感器对支架进行拍摄。
2.3 图像存储、传输和处理
普通视觉传感器的主体内存容量较小,一般仅能存储最近的几十张照片,所以通常只保存判断结果为NG的图像,无法满足保存所有图像的需求。本系统所采用的视觉传感器配有多个USB接口,可以外接USB存储器,极大地扩展了图像的存储容量,存储速度仅为33 ms左右,因而可以将测量过程中的所有图像进行保存;另外视觉传感器通过用指令的无协议方式,通过Ethernet使用UDP通信协议与上位机进行通信,将当前时间、当前的图像显示状态、图像数存入上位机实时和历史数据库。保存的全部图像可用于对历史数据进行趋势分析,再根据接触轨支架的垂直度变化趋势,对接触轨的形变进行提前预判。此外,该图像传感器还配有RGB模拟视频输出接口,可以实时地将所拍摄的图像信息显示在电脑屏幕上,可以即时地对NG图像的信息进行分析。如图6所示为试验中实时采集的地铁输电接触轨支架的图像数据。
3 结语
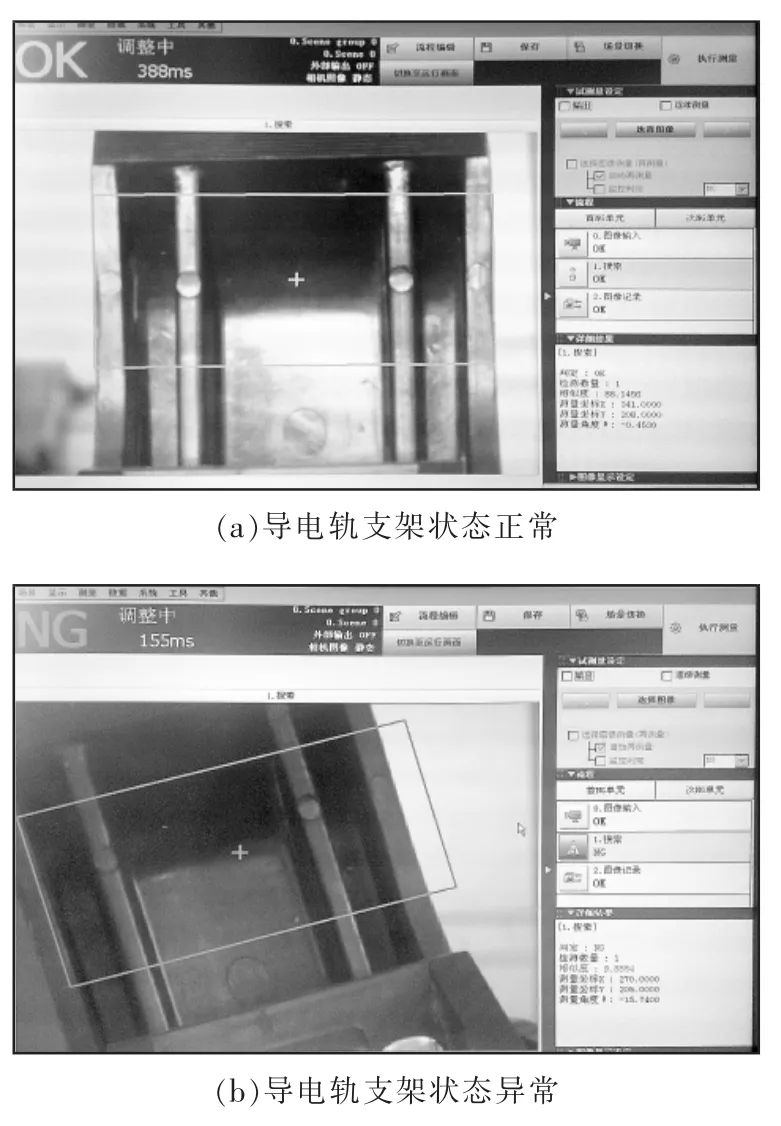
图6 试验中实时采集的地铁输电接触轨支架的图像Fig.6 Image data of subway transmission rail bracket in the test
本装置的研究提供了一种用于检测下接触式地铁输电轨受流面直线度及输电轨“支撑桩”形态的自动检测手段,主要针对接触轨变形导致“支撑桩”异常以及接触轨结合处错位进行检测,用来替代人工行走和肉眼检测,提高检测效率和检测精度。在检测车上通过视觉传感器、激光位移传感器实现输电接触轨快捷有效的动态监测,同时记录地铁走行轨和输电接触轨之间的位置检测、输电接触轨的支架状态数据,实现在线和离线故障诊断。检测数据存入历史数据库,可离线调用和分析,可查询任意区域和某一时刻接触轨受流面的直线度以及任意 “支撑桩”在某一时刻的图像数据,以进行历史状态比较和趋势分析,实现状态预测诊断和维护,目前已经过实验室和地铁导电轨工厂试验,可以提高地铁维护维修的管理水平和工作效率。
[1] 龚文涛.钢铝复合接触轨在广州地铁四号线的应用[J].都市快轨交通,2007,20(3):82-85.
[2] 李真花.钢轨断面高精度动态监测系统设计[D].北京:北京交通大学,2008.
[3] 宋君义,王显忠,宋成成,等.接触轨检测轨道手推车:CN104029694 [P],2014.
[4] 李立明.基于图像处理的轨距检测算法研究[D].上海:上海工程技术大学,2012.
猜你喜欢
计量学报(2022年7期)2022-08-23 09:23:24
汽车实用技术(2022年14期)2022-07-30 06:10:12
保健医苑(2022年5期)2022-06-10 07:46:12
大众标准化(2022年10期)2022-02-06 12:25:03
小哥白尼(趣味科学)(2021年8期)2021-11-20 06:08:04
铁道建筑(2020年8期)2020-09-04 06:08:42
模具制造(2019年3期)2019-06-06 02:10:54
减速顶与调速技术(2018年1期)2018-11-13 01:09:30
制造技术与机床(2017年6期)2018-01-19 02:41:19
重型机械(2016年1期)2016-03-01 03:42:06
