
一种地球紫外中心快速提取方法
2015-01-25 01:31:16张翰墨杨文博吕春光
宇航学报 2015年12期
张翰墨,卢 山,杨文博,吕春光
(1.上海市空间智能控制技术重点实验室,上海201109;2.上海航天控制技术研究所,上海201109;3.南京大学国际地球系统科学研究所,南京210023)
0 引言
航天器的自主导航技术已经成为各国研究的热点,其抗干扰性和高可靠性是研究的目标。地球紫外辐射特性具有可全天时观测的特征,在地球边缘处的“亮环”不受地貌和大气的影响,可观测到较稳定且明显的临边特征,这使得紫外敏感器具有提供高稳定性导航信息的优势。通常,紫外敏感器通过对地球成像并对地心矢量估计来提供卫星的导航信息[1-3]。紫外敏感器的研制和导航应用研究始于20世纪90年代,随着对星体紫外辐射特性研究的深入与积累,导航应用研究也从中低轨发展为高轨或者深空探测的巡航段任务[4]。国内研究的紫外敏感器应用于我国的探月工程,该应用首先对月球的紫外敏感器成像,然后估计月心矢量从而实现导航。该应用中采用其8个环形不连续子视场拼接得到的大视场成像敏感器对月球成像并整合得到月球的边缘信息,利用月球圆盘和黑暗太空背景之间的亮度反差估计得到200 km轨道高度的月心矢量及导航信息[2]。在此类大视场紫外敏感器基础上,学者们开展了诸如坐标系误差[5]、姿态角影响[6]等相关的算法以补偿导航精度。
面向高轨任务的地球紫外敏感器研究方向中,公开的研究成果集中在导航算法上。研究结果表明导航误差的主要影响来自于地心方向的测量误差,而不是地心距的测量误差[4],并且考虑到轨道高度,如何从地球紫外特征图像中准确估计地心方向是紫外导航敏感器研究领域的重点。目前行星形心的估计方法主要分为重心法[7]和拟合法[8-9]。重心法的有效性取决于目标能量分布的均匀性、目标边缘的完整性,以及边缘特征提取的准确性。考虑到地球紫外辐射特征的不均匀性,拟合法更适用于地球中心的提取。拟合法主要利用的是提取行星边缘的特征,而梯度算子可以有效增强图像的边缘信息,更稳定地描述局部图像[10]。边缘提取算法需要同时考虑计算机计算能力和内存空间对其有效性的限制。本文以对地球完整一次成像的高轨敏感器为基础,提出了一种基于梯度统计特征的边缘提取算子,在有效检测出地球紫外临边"亮环"边缘后通过最小二乘拟合算法解出地平圆盘中心,实验表明本文提出的算法能够得到亚像素级精度的地心位置。
1 地球紫外图像特征
地球的紫外辐射能量值具有稳定性,其能量值主要与大气臭氧分子浓度的垂直分布和吸收特性相关。
考虑到地球大气层分子随着海拔高度越来越少,而紫外谱段的能量主要被臭氧吸收,在280 nm~300 nm紫外波段范围内(见图1),大气层40 km以下,大气透过能量可近似忽略,而到海拔高度55 km时,大气透过率可达到90%以上。此谱段的紫外辐射能量在地球表面55 km以上衰减非常小,因此可观测到较明显的地球临边特征;并且地球临边辐射能量由于不受到地球表面和大气对流层、大气平流层的影响,具有较高的稳定性,是用于确定地心位置的有利依据。
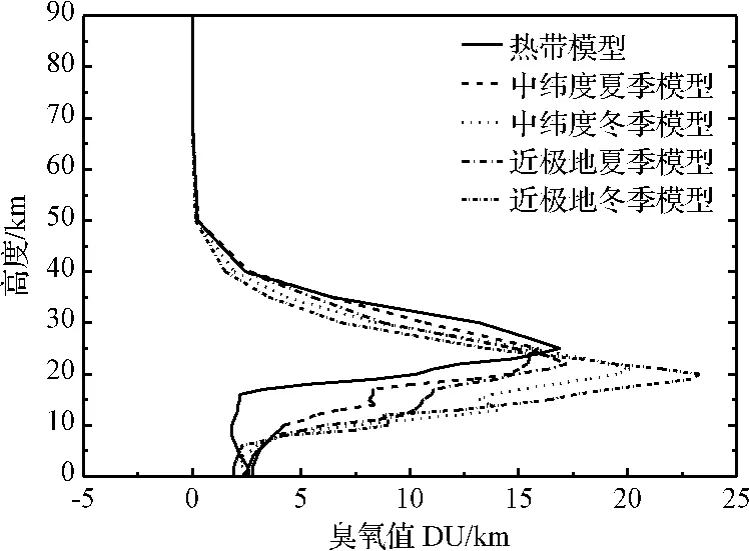
图1 大气模型中臭氧值随高度变化曲线Fig.1 Oxygen change curves with increasing altitudes in atmospheric model
由于目前国际上没有公开的在轨的高轨紫外图像数据,研究大多采用软件模拟生成高轨的紫外图像。综合考虑轨道高度、观测时间、观测点得到的模拟数据中,地球的紫外辐射能量在地球临边呈现出“亮环”的现象。虽然由于同一天中观测时间的不同,导致辐射亮度分布各异,能量较大的区域均分布在地球边缘。
2 地球边缘提取
由于受到轨道特性、大气海拔高度、观测时间等影响,地球紫外辐射特征在逐采样点间的特性各异,并且地球边缘“亮环”在图像表达上呈现非均匀性,故采用梯度特征可以更鲁棒地描述地球“亮环”特征。
2.1梯度图计算
传统的边缘提取算法主要包括微分检测算子和变换域检测算子。其中微分检测算子利用的是图像边缘的空间信息,基于边缘点邻域内灰度信息在一阶导数或者二阶导数处的过零点特性实现边缘提取,原理清晰且计算简便。另一类变换域检测算子主要是利用图像边缘结构信息,计算量较大,且往往需要投票机制,占用较多的资源。结合星上计算机的存储空间特性,微分检测算子更加具有实用性。
选择采用计算简单且有效检测的Sobel算子。通过X方向和Y方向的模板(见图2)计算得到,具有低内存要求的特点。

式中:G(x,y)表示图像坐标为(x,y)的像素的梯度值,GX(x,y)表示该点X方向梯度分量,GY(x,y)表示该点Y方向梯度分量。
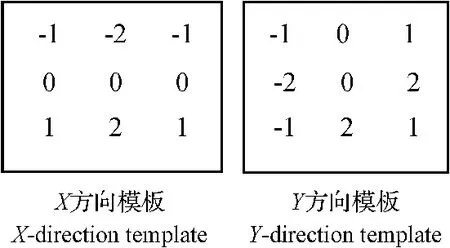
图2 Sobel算子模板Fig.2 Sobel operator templates
2.2梯度统计量计算
考虑到视场的因素,星空背景会使得边缘提取中包含非地球边缘点,进而影响地平圆盘中心方向提取精度。因此需要采用有效的滤波算法以降低误边缘点的数量。
然而考虑到自主导航的实时性和星载计算机有限运算空间特性,传统的滤波算法在取得较好去噪效果的同时,牺牲了计算效率或者内存空间。
本文提出一种基于梯度统计的边缘提取算子,在计算所得梯度图的基础上,通过计算局部二值模式(Local Binary Pattern,LBP)特征统计量来达到有效的滤波效果,实现边缘提取。并且由于算法的简单清晰,具有实时性和低开销的优点,易于星载计算机的移植。
1)LBP算子
LBP特征由Ojala等提出[11],能有效描述局部图像纹理的结构信息。采用LBP特征构建的直方图来进行匹配,在人脸识别、图像分类等领域具有广泛的应用。
LBP计算公式为:

八邻域LBP的基本模式有36个[12],更大的邻域计算半径R和更多的模板采样数P包含更多的模板算子(见图3)。
虽然地平圆盘的紫外临边“亮环”特征结构较为明显,然而成像过程中CCD离散采样和噪声的影响,使得紫外辐射“亮环”梯度图中表现出不均匀锯齿状的“毛刺”(见图4(b))。在边缘图上明显可见的“凸”型边缘点会降低中心点的提取精度。

图3 LBP计算模板示意图Fig.3 Binary LBP template
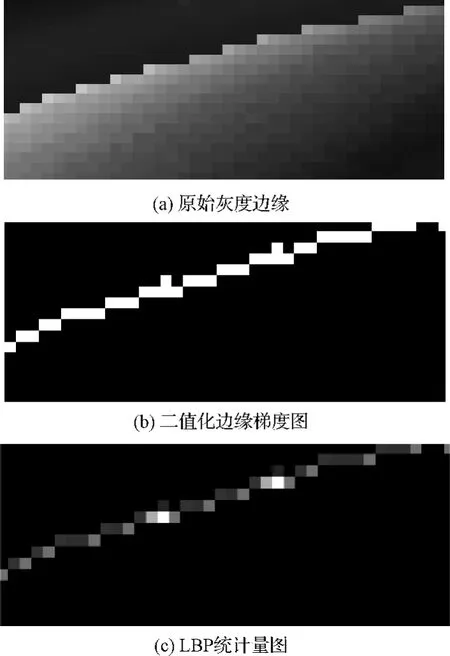
图4 边缘“毛刺”Fig.4 Blur on edges
由于视角等因素,部分星空会进入视场,使得梯度图(见图5)中会出现噪声点,如图5(b)中出现在地球大气层边缘的星点会直接影响地心提取精度。

图5 部分原始Sobel算子边缘梯度图Fig.5 Partial gradient map calculated by Sobel operators
2)改进的LBP统计量
本文结合边缘点邻域中像素点梯度方向的一致性和LBP算子的旋转不变性,改进的LBP统计量描述了地平圆盘边界点的局部对称结构,可以有效滤除“凸”型边缘点和离散噪声点。选取LBP模板中的对称结构来描述地平圆盘边界点。
分析2013年秋分零点的地球紫外辐射特性,以0.5 km间距采样,计算得到大气层90 km高的辐射量分布曲线(见图6)。可以观察到辐射量在15 km高度左右达到最大后急速下降,故梯度方向在边缘处方向非突变,而存在一个渐变的过程。

图6 2013年秋分零点某点辐射量曲线Fig.6 Atmosphere UV energy curve at AM 0 20130922
选取8个梯度方向作为梯度方向(见图7),计算每个邻域内在此8个方向所代表区域内的梯度方向值,在LBP描述上利用X方向和Y方向的连续结构的特点,实现边缘点提取。典型边缘点统计量包括:10000000,01000000等八个单方向特征量,以及10001000等连续性4个特征量。选择5×5的邻域尺寸进行计算以达到滤波的效果。

图7 LBP邻域八方向模型Fig.7 Binary LBP template in 8 directions
2.3地平圆盘中心拟合
由于本文讨论的是面向高轨的自主导航,在建立地平圆盘中心拟合模型时采用不考虑地球扁率的椭圆模型。当敏感器工作姿态角为零时,成像的方程为一个正圆,而通常情况下敏感器工作下,需要通过三个姿态角俯仰角,滚转角,偏航角将敏感器坐标系转换到轨道坐标系,此时的成像为一个椭圆。目前研究多采用圆模型和椭圆模型进行拟合[13],本文采用椭圆模型。
定义误差函数ES:

式中:
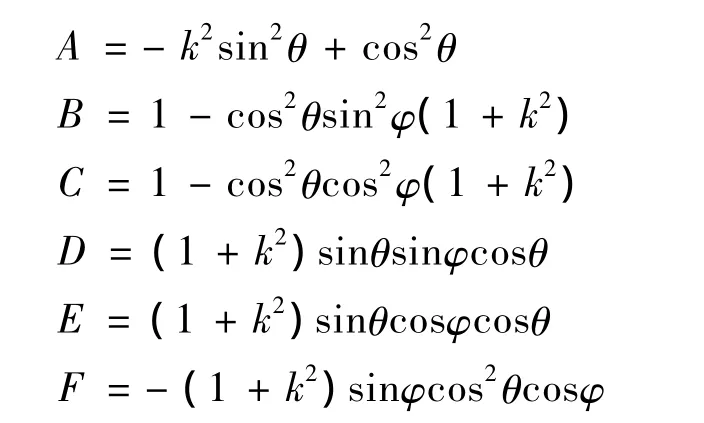
n为提取边缘点的数量,z为实际焦距,k为视角半径。
基于梯度统计算子提取的边缘点坐标(xi,yi),通过最小化误差函数ES,估算出地平圆盘的中心位置
式中:f为紫外敏感器焦距。
3 实验结果
采用MOTRAN软件对春分、夏至、秋分、冬至四天的地球紫外辐射特性进行模拟。生成的图像按照本文提出的方法进行处理。
实验比较了Sobel算子提取结果、SURF算子提取结果和本文提出改进算法的边缘点提取及圆心拟合结果。图8(a)(c)(e)为较典型的紫外图像,包括秋分傍晚、夏至凌晨、春分中午的伪彩色模拟数据。图8(b)(d)(f)是对应地球紫外图像的地心提取结果,其中“×”表示提取得到的边缘点,“·”表示通过拟合模型得到的椭圆结果。
模拟图像大小为1046×746像素,模拟地球中心点位置为(522.5,372.5)。模拟观测时间为春分、夏至、秋分、冬至这四节气中每天的4个典型时间作为实验图像,考虑到紫外敏感器成像过程中的噪声等因素的影响,对提取特征点数据采用随机噪声干扰,表1给出16幅模拟图像在随机噪声干扰下的中心坐标拟合结果。实验结果表明地心提取精度误差均在1个像素内,并且处理时间在20 ms内,满足自主导航实时性的需求。本文算法仅需遍历图像像素点一遍,简单快捷,内存存储的开销仅为一幅图像的大小,适合星上计算机移植。
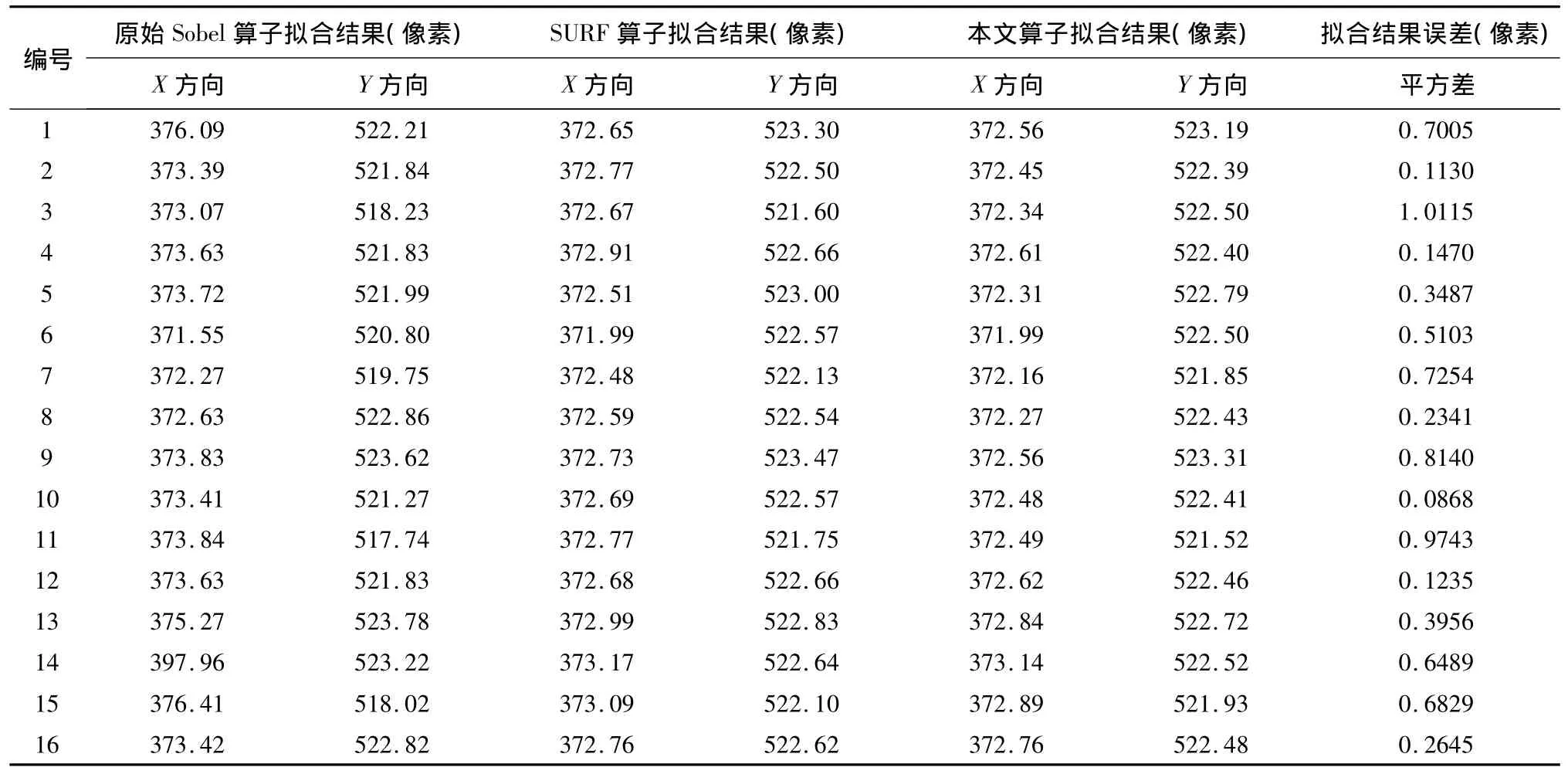
表1 紫外图像地平圆盘中心提取精度Table 1 Earth’s center detection results on ultraviolet image
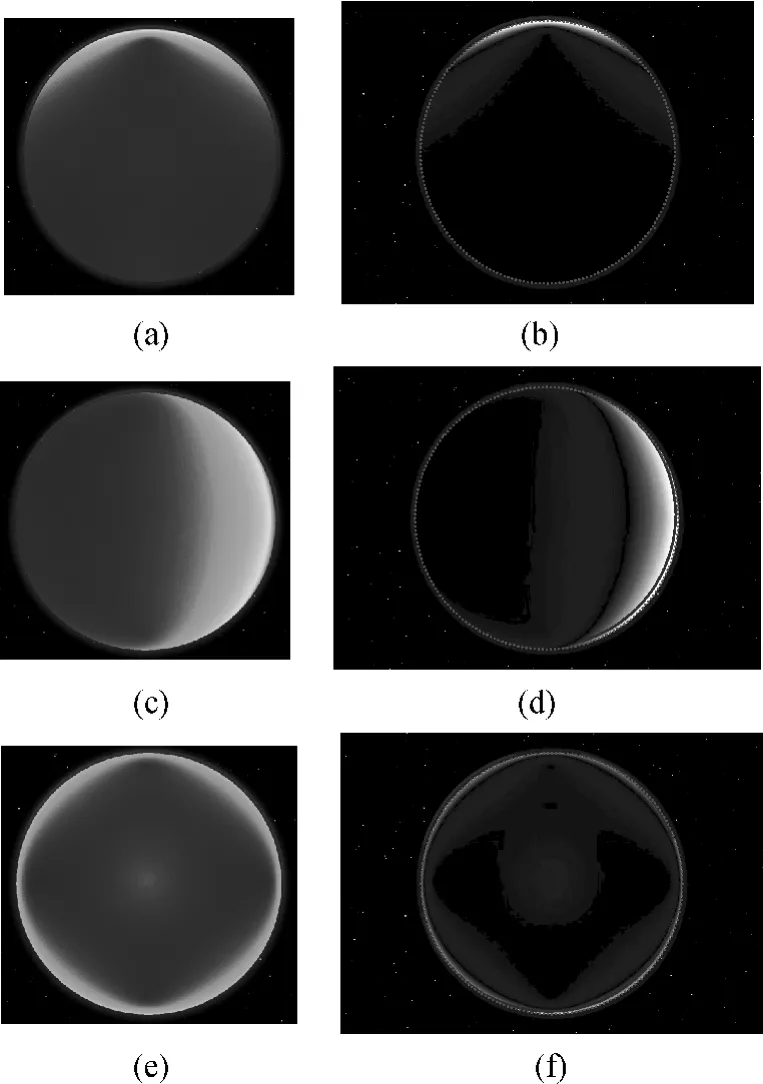
图8 紫外模拟数据及地球球心提取结果Fig.8 Simulated ultraviolet images and the earth extraction result
4 结论
本文实现了面向高轨自主导航的紫外特征地平圆盘中心提取。该方法采用基于梯度统计特征提取地球边缘紫外辐射“亮环”,并通过最小二乘拟合估计椭圆模型参数,进而求解得到地心位置。实验表明,本文提出的方法可以实现亚像素级精度的地心提取,快速、低内存开销,具有较强的鲁棒性。
[1] 王裙,熊凯,张斌,等.一种基于紫外姿态敏感器和星间相对测量的星座组合导航方法[J].航天控制,2013,31(5):83-89.[Wang Qun,Xiong Kai,Zhang Bin,et al.An integrated navigation method for the constellation based on ultraviolet sensor and inter-satellite relative measurements[J].Aerospace Control,2013,31(5):83-89.]
[2] 宋琛,张蓬蓬,张剑波,等.基于紫外敏感器的卫星自主导航[J].计算机仿真,2010,27(11):14-17.[Song Chen,Zhang Peng-peng,Zhang Jian-bo,et al.Satellite autonomous navigation based on ultraviolet sensors[J].Computer Simulation,2010,27(11):14-17.]
[3] 孙俊,张世杰,李葆华.利用地球紫外和恒星可见光的卫星自主导航[J].光学精密工程,2013,21(5):1192-1198.[Sun Jun,Zhang Shi-jie,Li Bao-hua.Autonomous navigation based on star light and ultraviolet Earth sensors[J].Optics and Precision Engineering,2013,21(5):1192-1198.]
[4] 乔国栋,李铁寿,王大轶.基于紫外敏感器的地月转移轨道慢旋探测器自主导航算法[J].宇航学报,2009,30(2):492-496. [Qiao Guo-dong,Li Tei-shou,Wang Da-yi.Autonomous navigation algorithm for slow-spin probe in earthlunar transfer orbit based on ultraviolet sensors[J].Journal of Astronautics,2009,30(2):492-496.]
[5] 魏春岭,张斌,张春青.一种姿态机动辅助下的天文导航系统偏差自校准方法[J].宇航学报,2010,31(1):93-97.[Wei Chun-ling,Zhang Bin,Zhang Chun-qing.An attitude maneuvering aided self-calibration algorithm for celestial autonomous navigation system[J].Journal of Astronautics,2010,31(1):93-97.]
[6] 李茂登,荆武兴,黄翔宇.考虑月球扁率修正的月球卫星自主导航[J].宇航学报,2012,33(7):896-902.[Li Maodeng,Jing Wu-xing,Huang Xiang-yu.Autonomous navigation for Lunar satellite with Lunar oblateness correction[J].Journal of Astronautics,2012,33(7):896-902.]
[7] 杨鹏,谢立,刘济林,等.基于Zernike矩的高精度太阳图像质心提取算法[J].宇航学报,2011,32(9):1963-1970.[Yang Peng,Xie Li,Liu Ji-lin,et al.Zernike moment based high-accuracy Sun image centroid algorithm[J].Journal of Astronautics,2011,32(9):1963-1970.]
[8] 陈阔,冯华君,徐之海,等.亚像素精度的行星中心定位算法[J].光学精密工程,2013,21(7):1181-1190.[Chen Kuo,Feng Hua-jun,Xu Zhi-hai,et al.Sub-pixel location algorithm for planetary center measurement[J].Optics and Precision Engineering,2013,21(7):1181-1190.]
[9] 张莹瑾,秦世引,胡晓惠.航天器自主交会对接的高精度目标定位方法[J].宇航学报,2014,35(12):1430-1436.[Zhang Ying-jin,Qin Shi-yin,Hu Xiao-hui.A high accuracy target positioning method for autonomous rendezvous and docking between spacecrafts[J].Journal of Astronautics,2014,35(12):1430-1436.]
[10]Ahmed F.Gradient directional pattern:a robust feature descriptor for facial expression recognition[J].Electronics Letters,2012,48(19):1203-1204.
[11]Ojala T,Valkealahti K,Oja E,et al.Texture discrimination with multidimensional distributions of signed gray level differences[J].Pattern Recognition,2001,34(3):727-739.
[12]Grubler A C.Multiresolution Gray-scale and rotation invariant texture classification with local binary patterns[J].IEEE Transactions on PAMI,2001,24(7):971–987.
[13] 刘军,韩潮.基于圆球与椭球的地球敏感器地心矢量算法分析[J].航天控制,2008,26(2):86-91.[Liu Jun,Han Chao.Arithmetic analysis of geocentric vector based on Earth sensor for spheral model and oblate model[J].Aerospace Control,2008,26(2):86-91.]
猜你喜欢
数学物理学报(2021年6期)2021-12-21 06:24:38
数学物理学报(2021年2期)2021-06-09 08:54:26
石材(2020年6期)2020-08-24 08:27:00
应用数学(2020年2期)2020-06-24 06:02:50
应用数学(2020年2期)2020-06-24 06:02:44
数学年刊A辑(中文版)(2018年2期)2019-01-08 01:59:54
数学年刊A辑(中文版)(2018年2期)2019-01-08 01:59:52
数学物理学报(2017年1期)2017-06-05 09:12:28
红蜻蜓·低年级(2017年3期)2017-03-30 16:32:23
数学物理学报(2016年3期)2016-12-01 05:36:27
