利用北斗反射信号探测目标的初步实验
2015-01-22 09:34:54裴博宇严颂华王泉德陈能成
雷达科学与技术 2015年6期
裴博宇,严颂华,王泉德,陈能成
(1.武汉大学电子信息学院,湖北武汉430072;2.武汉大学测绘遥感信息工程国家重点实验室,湖北武汉430079)
0 引言
在卫星导航应用中,以GPS系统为信号源,利用GNSS卫星反射信号进行反射面参数探测的一种新型遥感手段——全球卫星导航反射技术(GNSSR)[1-2]。美国从1997年开始针对GPS反射信号进行研究和机载实验,并且获取了大量的研究成果[3-4]。这种技术主要应用于陆面、海洋参数的测量与反演,比如海面粗糙度与风速和风向[5]、海面风场[6]、土壤湿度[7]、雪深[8]等海洋与陆地环境的反演与监测。
利用GNSS-R技术探测目标也是研究热点之一,其属于一种无源雷达模式。1993年至1995年研究人员曾对GNSS信号的无源雷达开展过对空中飞机、导弹、飞船等目标的探测实验[9]。
目前,国外反射信号的研究者使用的导航星座多为GPS,GLONASS及Galileo系统[10-12],而北斗系统作为我国独立自主开发建设的全球导航定位系统,同GPS系统一样,能向军用和民用提供导航、定位和授时等服务,并拟于2020年提供全球无源服务[13]。
利用北斗卫星的反射信号作研究也已经得到了众多领域研究人员的高度重视。2011年至2013年间,德国地球科学研究中心葛茂荣对北斗导航卫星精密定轨理论和对流层延迟做了大量研究工作[14-15]。2014年,北京航空航天大学开展了对北斗卫星反射信号的研究和实验,并研发了一种基于北斗反射信号的海风海浪探测系统[16]。
目前,利用北斗导航卫星的反射信号作目标探测的研究,还有很多值得研究的地方。本文利用北斗的GEO(Geostationary Earth Orbit)卫星,探讨对反射信号开环处理的方案,实现对反射点位置的探测,来论证原理的可行性。在下面的部分中,本文将首先介绍目标探测的原理,然后设计了实验的硬件架构和软件架构,最后通过楼宇反射实验和长江大桥反射实验来验证该探测方案。实验结果证明了本方案的可行性和正确性。
1 探测原理
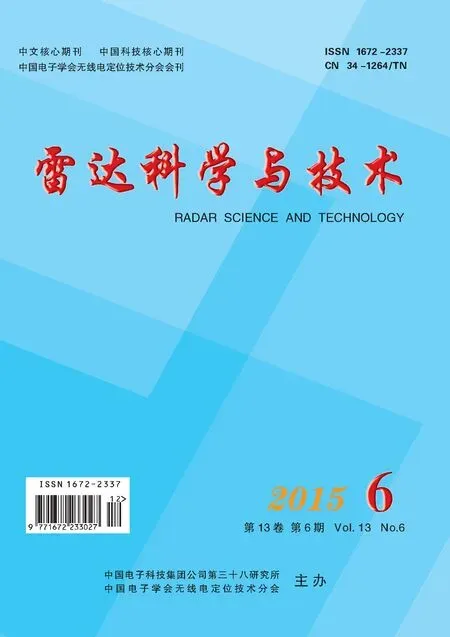
雷达探测的基本原理是测量收发电波的延时。但是本文采用的发射源是位于2万多公里高空的卫星,而接收机处于地面,是一种收发分置的双基地雷达系统,因此其探测的原理主要是利用反射信号和直达信号的时间延迟或者相位延迟来实现。图1中展示了利用北斗反射信号实现目标探测的示意图,其中,从发射卫星到达地面的电波信号可以认为是平面波,平行入射到地面。图中,楼宇的侧面垂直于地面,是本文设定的探测目标。一路直射信号经过楼宇在A点反射后,被反射天线在P点处接收,称作反射信号,而另外一路信号则被直达天线在P点处直接接收,称为直达信号,两路信号由信号采集器采集并分别处理。目标探测的工作就是找出反射信号的最强点并计算反射天线与楼宇的距离,即图中的d。
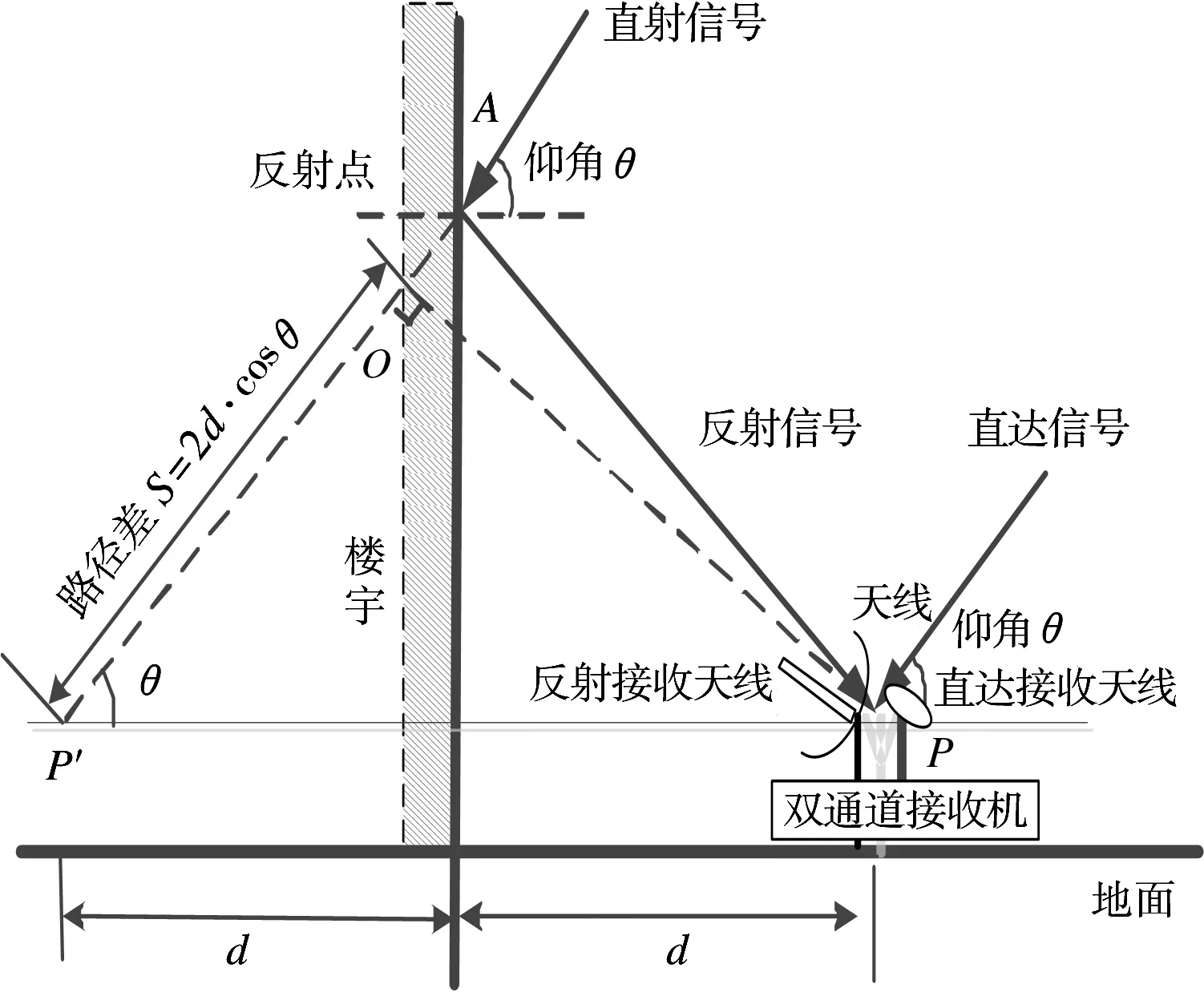
图1 目标探测示意图
图1中p′点是接收天线所在位置p点相对于楼宇的镜像。从图中可见,经过反射点的北斗反射信号相对于直达信号多行进一段距离,即图中所标注的OP′段,点O为两线段的垂足点。反射信号相对于直达信号有一个时间延迟τ,并且根据卫星、接收机和反射点的几何关系,可得到过反射点A的反射信号相对于直达信号的路径延迟S=2×d×cosθ,那么,d=S/(2×cosθ),其中d为接收机到反射面的垂直距离,θ为北斗导航卫星的倾角。
上面描述的路径延迟反映到接收机的信号处理回路中,就表现为反射信号相比直达信号的码相位延迟,可以在接收机中求得该码相位延迟。若导航信号的码周期为T,一个码周期的码片数为NT(对于北斗信号来说,一个码周期的码片数为2046),则对应于北斗信号的码片延迟满足τ0×T/NT=S/c。其中,τ0为反射信号相对于直达信号的码片延迟数(单位:个),c为电磁波传播速率。
由于反射信号和直射信号存在波程差,必然造成反射信号相对于直射信号的码延迟。两个通道的信号通过环路控制实现对码相位的跟踪,得到反射点处反射信号的延迟码片,并由此确定路径延迟δτ,进而求解出反射点的位置。假定接收到的直射信号为r i(t),本地产生的信号为u i(t),则直达信号的相关功率:

式中,τ为码延迟偏移量,当τ=τ1时,直达信号的相关功率达到最大值。
接收到的反射信号为r i(t-τ1-δτ),δτ表示为相对于镜面反射点总的延迟偏移量。反射信号的相关功率:

图2表示两路信号的相关功率以及码延迟τ1和δτ的相对关系。当τ=τ1+δτ时,反射信号的相关功率达到最大值。实验中,以直达信号为基准,即τ1=0,那么反射信号的相关功率值达到最大值时所对应的码片延迟量即为所求。

图2 直达信号与反射信号相关功率的相对关系
2 硬件系统架构
如前所述,采用北斗信号进行目标探测的关键在于计算直达信号和反射信号的延时,所涉及的硬件平台也必须与此相适应。图3显示了本文所采用的系统框图。
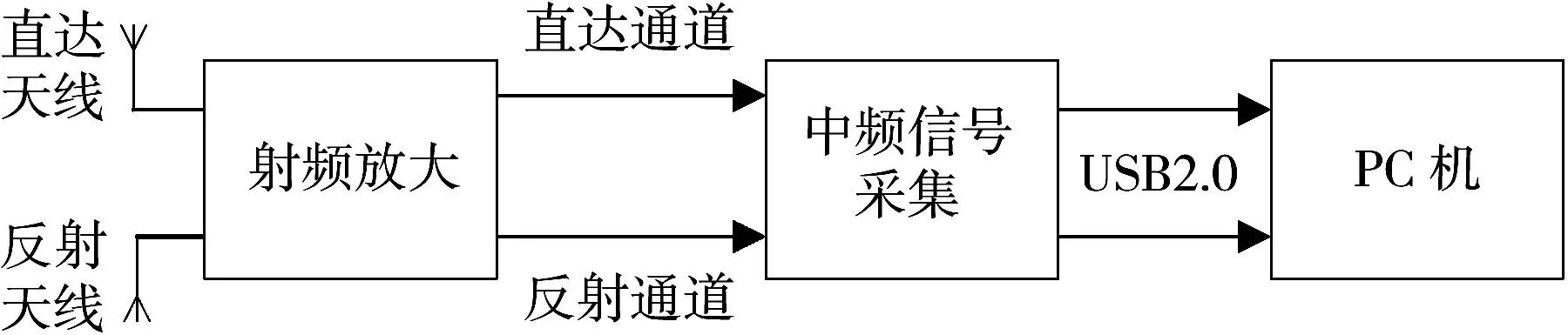
图3 硬件架构图
采集器采集经天线接收的两路信号,通过下变频得到中频信号,然后将经过模数转换后的数字信号通过USB2.0接口传输到PC机端,最后利用软件程序进行后处理。
下面对该方案中涉及的硬件进行详细描述。
1)天线部分
对于直达信号,由于该信号较强,所以采用普通的微带天线;对于反射信号,由于信号微弱,所以需要高增益天线。本文采用了定制的螺旋天线。
2)中频采集器
本方案所采用的信号采集器是由北斗星源公司研发的HG-SOFTGPS02双通道GNSS中频信号采集器。该采集器的射频端由两个同源的MAX2769集成芯片构成,支持GPS、BD2、Galileo信号的采集。
如图4所示,射频前端对信号进行滤波,后通过混频器将输入信号与本地振荡器信号进行混合,从而将信号下变频到较低的中频。再经过滤波来滤除其他频点的信号。最后将生成的模拟中频信号通过模/数转换器(ADC)转换成数字中频信号。MAX2769的采样频率设置为16.368 MHz、中频频率为3.996 MHz。输出的数字中频信号被设定为只有I路2位符号/幅度的数据格式。得到中频信号以后,通过USB2.0接口将数据传输到PC端,利用软件接收机进行后续处理。
图4 基于MAX2769射频前端电路简图
3 软件系统构架
当中频采样数据被USB接口送至计算机之后,即通过软件部分对信号进行处理,主要对接收机的直达信号和反射信号进行处理。系统的实现框图如图5所示。
图5中,首先通过直达通道对直达信号进行捕获和跟踪,产生较精确的伪码相位和载波相位,并用于反射通道对反射信号的解调。详细过程分述如下。
3.1 直达信号的处理
北斗系统B1频段信号由I、Q两个支路的“测距码+导航电文”正交调制在载波上构成。测距码也分I支路的普通测距码(C码)和Q支路精密测距码(P码)。B1频段信号表达式如下:

式中:上角标j表示卫星编号;AB1I,AB1Q表示B1I和B1Q信号振幅;CB1I,CB1Q表示B1I和B1Q信号测距码;DB1I,DB1Q表示调制在B1I和B1Q测距码上的数据码;f1表示B1信号载波频率;φB1I,φB1Q表示B1I和B1Q信号载波初相。本文主要研究B1频段信号I支路的信号。
直达信号的处理是为了给反射信号提供参考,即提供载波和伪码相位的基准。因此,该信号的处理与常用北斗接收机一样,也划分为捕获和跟踪两个阶段。但是,由于前述中频信号的采样率为16.368 MHz,因此,在跟踪时需要对其进行数据的抽取。
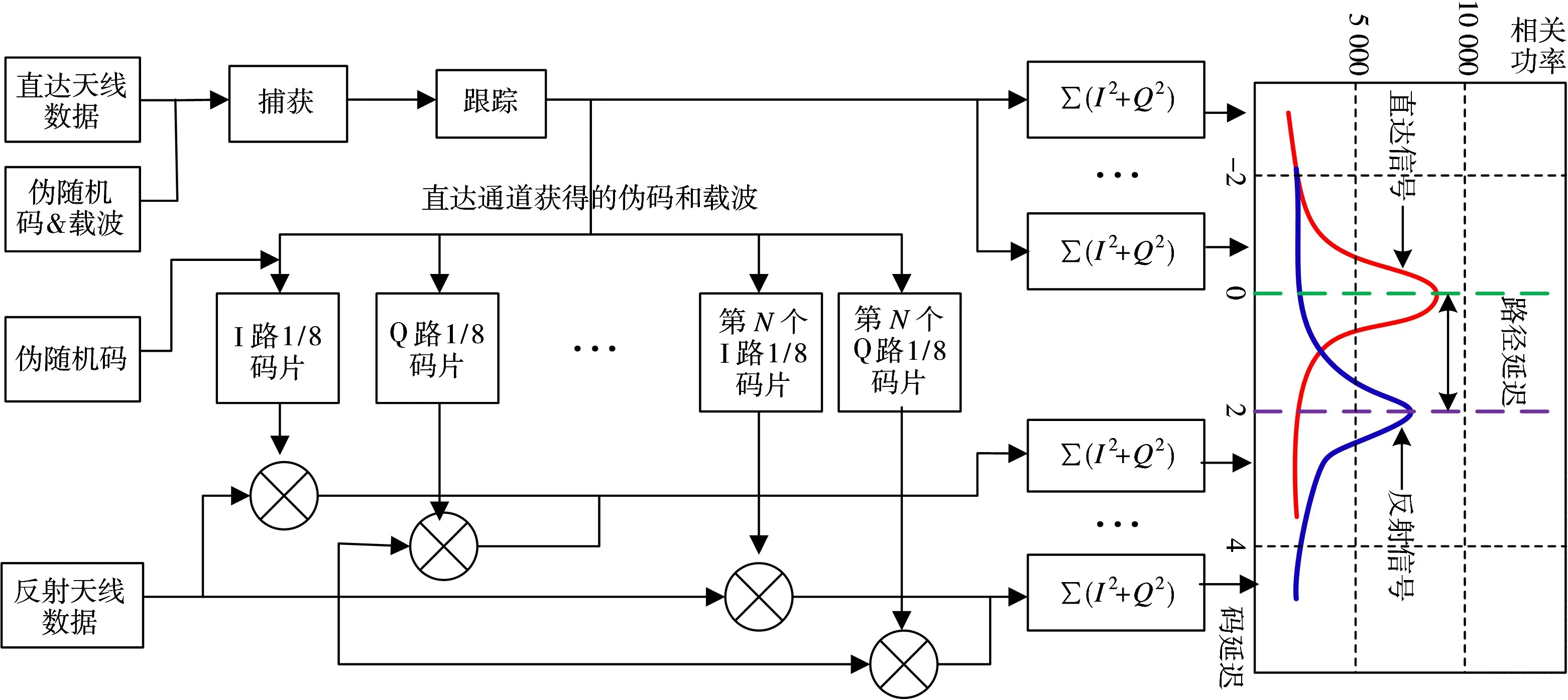
图5 系统框图
1)捕获
接收机接收到北斗卫星信号后,要对所有可见的卫星进行搜索。接收机首先以一定的频率步长和码延迟步长产生本地载波与本地C/A码,然后与接收信号作相关运算。当相关值超过设定的判决门限后,就认为信号存在,由本地的信号参数也就可以确定接收信号的多普勒频率和伪码延迟。在本方案设计的软件接收机中,使用并行码相位算法进行捕获。
2)跟踪
捕获完成后获得载波频率和码相位的粗略值。因此,需要通过跟踪进行细调,以便系统能用精确的码相位和载波频率解调出导航数据。跟踪过程中,首先将载波从输入信号中剔除,然后再与本地复制伪码相乘,输出即为导航数据。所以跟踪过程需要产生两种复制信号,一种为载波,一种为伪码。相应地,跟踪就分为载波跟踪和码跟踪[17]。
3.2 反射信号的处理
目标的信息包含在反射信号中,因此对反射信号的处理尤为重要。如前所述,反射信号强度微弱,所以不能进行跟踪处理。本文采取开环处理,即从直达信号通路中获得参考的码相位,使本地C/A码和直达信号的C/A码对齐。同时用直达信号载波对反射信号进行载波剥离。两通道信号的相位差示意图如图6所示。
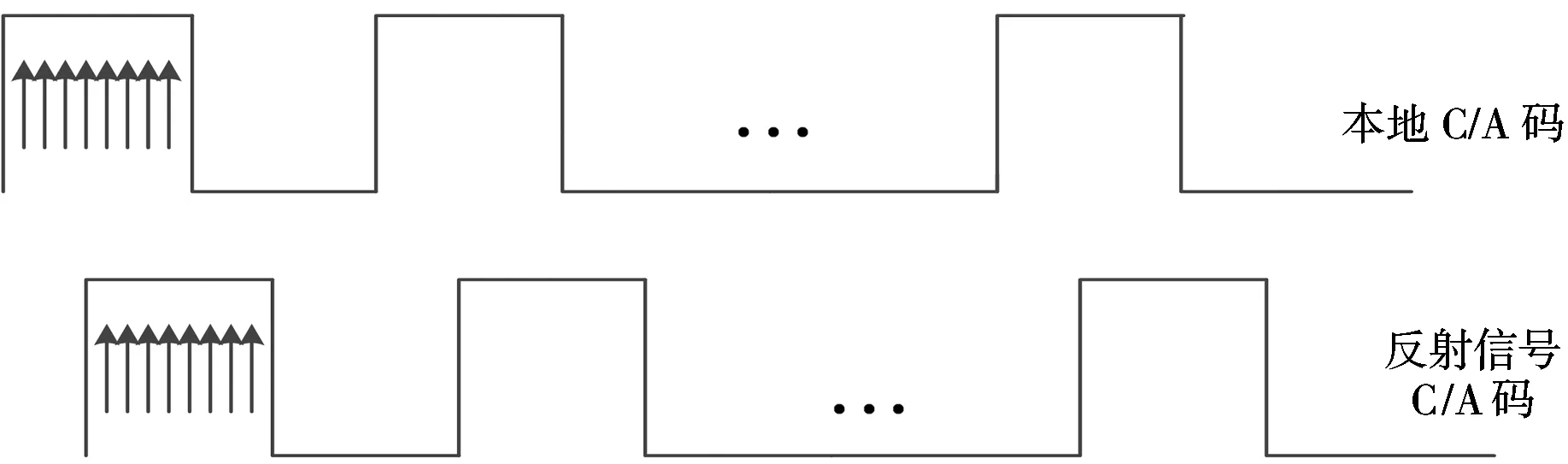
图6 直达信号与反射信号相位差
为了提高距离分辨率,本文通过采样频率的提高来处理。中频采样器的采样频率为码速率的8倍,为了充分利用每一个采样点,把本地C码的每个码片变为8个点(对应采样频率为16.368 MHz),再以0.125个码片为间隔,生成比直达信号C码超前一个码片以内,以及比直达信号滞后1个码片以内的C码序列。共17个本地C码序列。然后将这17个序列分别与从反射信号中剥离的C码进行相关运算,相关度最高的本地码序列,最接近反射信号的C码,该码和直达信号C码的相位差即为直达信号和反射信号的相位差。具体实现方法如图7所示。
4 探测方案设计与测试结果
4.1 楼宇反射实验
楼宇反射实验场地我们选择较为空旷的地方,如图8所示,天线处于楼宇的正南面。实验中,用激光测距仪记录接收机到大楼的水平距离D=46 m,采集实验数据,通过后续的数据处理来验证位置的准确性。
北斗测距码码长为2 046,码周期为1 ms。那么,一个码片周期所对应的距离约为
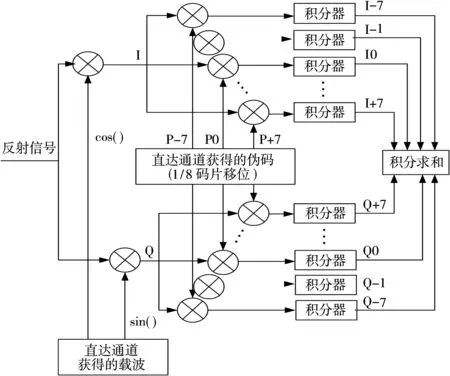
图7 反射信号处理框图
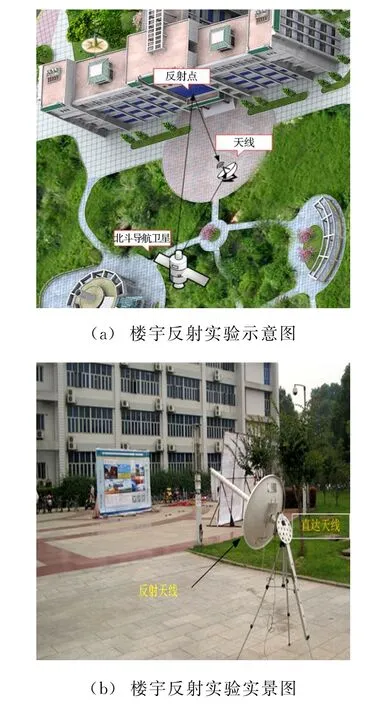
图8 楼宇反射实验图

单个码片所对应的距离约为d1/2 046=146.63 m。实验中中频采样器的采样频率为码速率的8倍,一个码片被采样为8个点,为了充分利用每一个采样点,把本地C码的每个码片变为8个点(对应采样频率为16.368 MHz),则测距精度为

图9(a)中,浅色直方图表示接收机捕获到其对应编号的卫星信号,深色直方图表示接收机没有捕获到的卫星信号。图9(b)是所捕获的卫星信号星座图。图中同心圆是等仰角线,从外侧到圆心分别代表仰角为0°,30°,60°和90°。分布图中1,2,3,4,5号卫星是北斗静止轨道卫星,相对于接收机是静止的,其他卫星是运动的,方位角和仰角是不固定的。本实验选择静止轨道卫星,当采样频率为16.368 MHz时,北斗C码测距精度为18.33 m。实验中主要分析仰角在30°到60°之间的卫星。根据捕获结果,选择对应卫星的仰角,并选取合适的通道进行跟踪和分析。
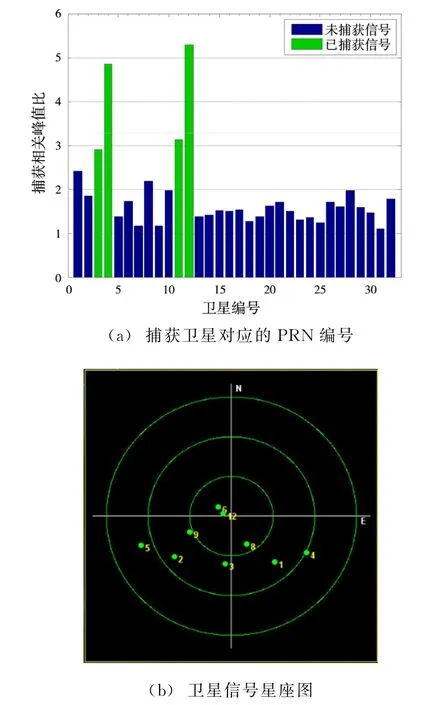
图9 目标在46 m时的捕获结果
由于大楼朝向正南面,由星座图可以看出3号星位于星座图的南方,仰角约为50°,适合作为分析对象。图10反映的是直达信号与反射信号相关功率,图中横坐标代表1/8码片数,纵坐标代表两路信号的相关功率。由图可知,直达信号大概在0时刻(码延迟为0)相关功率达到峰值,而反射信号大概在第3个1/8码片时刻相关功率达到峰值。我们以直达信号为基准,那么反射信号的码延迟为3个1/8码片。那么,实际路径延迟S′=3×d2=3×18.33=55 m。理论路径差S=2×d×cosθ=2×46×cos50°≈59 m。在误差允许范围内,实际路径差与理论路径差相吻合,证明了实验数据的正确性和方案的可行性。
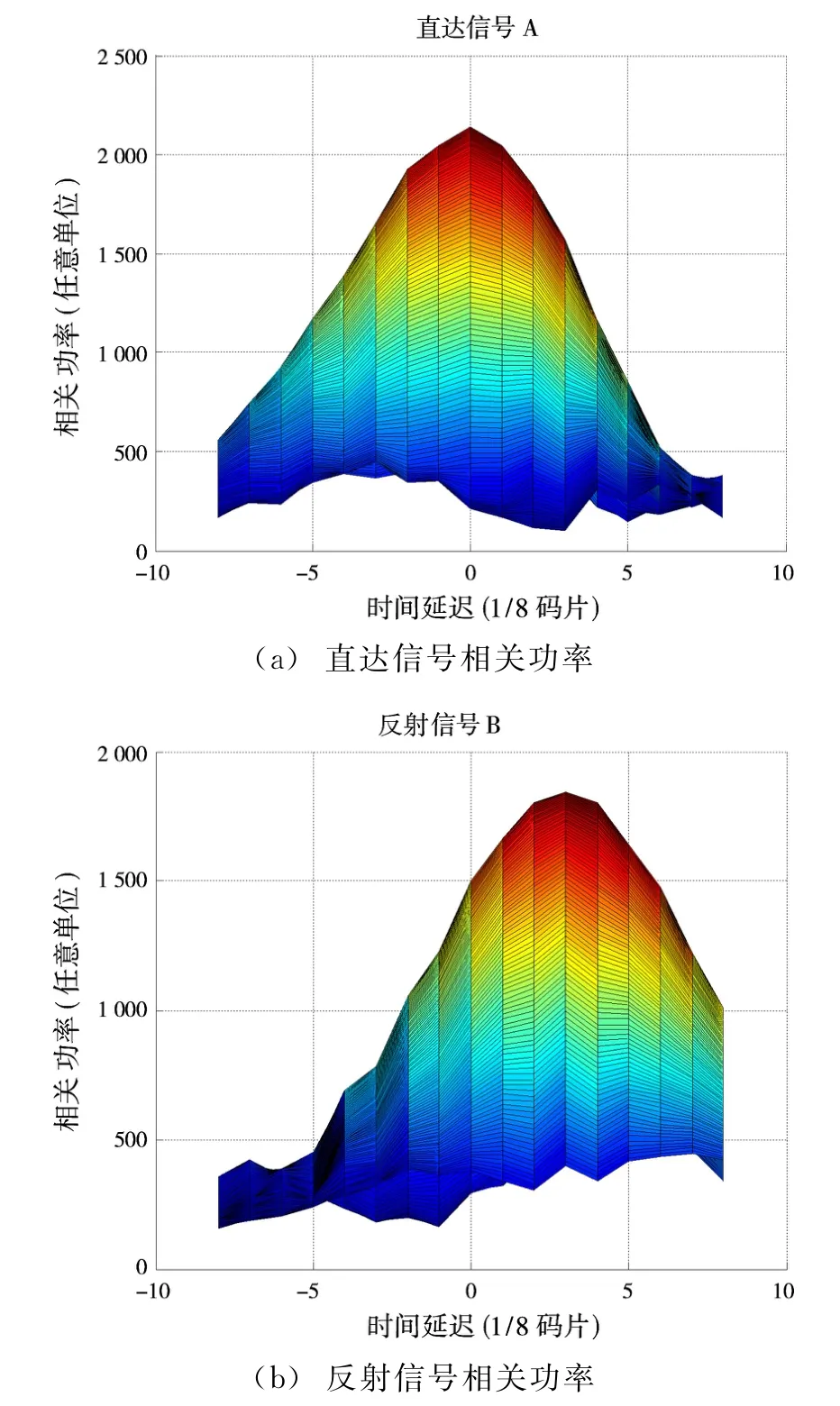
图10 直达信号与反射信号相关功率对比图
4.2 长江大桥反射实验
图11是长江大桥反射实验图,武汉长江大桥方位是从西北至东南走向,实验中,在长江大桥桥上架设天线并采集数据,天线朝南指向江面。图中两个天线分别接收直达信号和经过江面反射的信号,信号的采集和处理过程与楼宇反射实验相同,这里就不再赘述。首先用气压计在桥下测得高度25 m,在桥上测得高度73 m,那么接收机与反射面的垂直距离,也就是大桥与江面的垂直距离为H=73-25=48 m。反射信号相对于直达信号的路径延迟为S=2×H×sinθ。
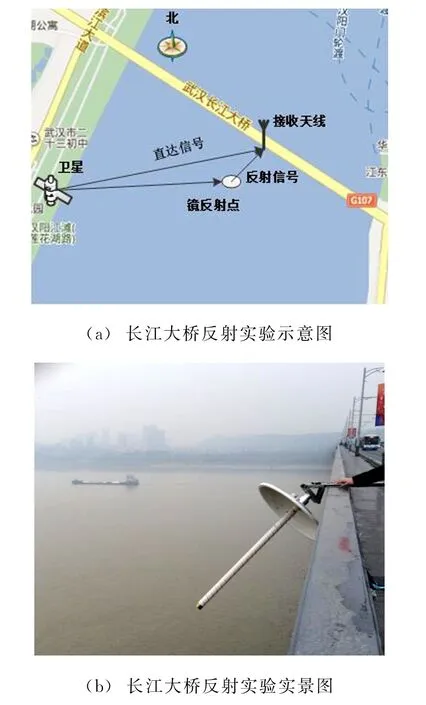
图11 长江大桥反射实验图
实验中,3号卫星依然适合作为分析对象。图12反映的是直达信号与反射信号相关功率,图中横坐标代表1/8码片数,纵坐标代表两路信号的相关功率。由图可知,直达信号大概在0时刻(码延迟为0)相关功率达到峰值,而反射信号大概在第4个1/8码片时刻相关功率达到峰值。以直达信号为基准,那么反射信号的码延迟为4个1/8码片。那么反射信号与直达信号的实际路径延迟为S′=4×d2=4×18.33=73.32 m。理论路径差S=2×H×sinθ=2×48×sin50°≈73.5 m。在误差允许范围内,实际路径差与理论路径差相吻合,证明了实验数据的正确性和方案的可行性。
5 结束语
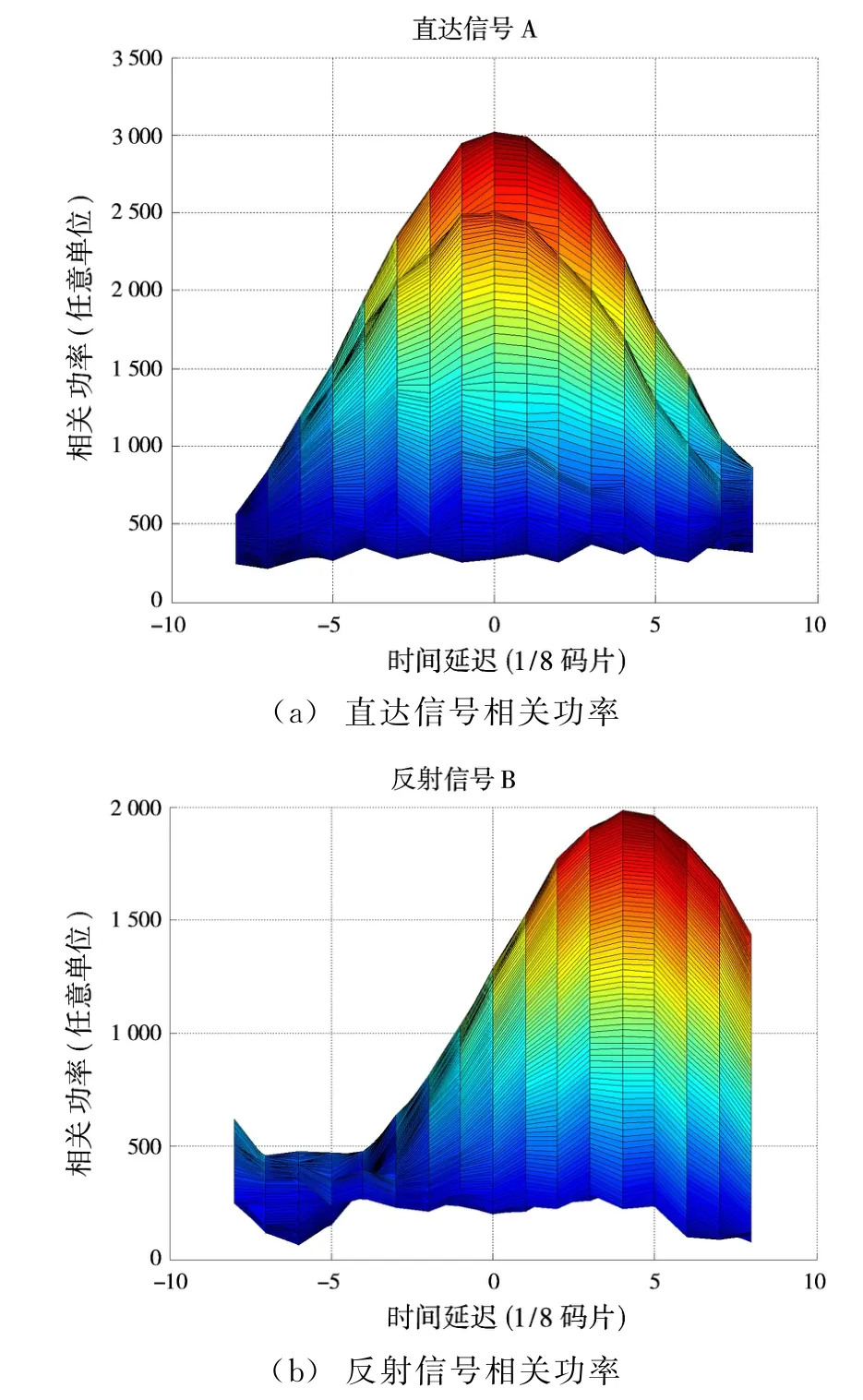
图12 直达信号与反射信号相关功率对比图
本文描述了利用北斗导航卫星反射信号做目标探测的实验,详细分析了根据北斗直达信号和反射信号的路径差来计算接收机与反射面位置的数学模型,给出了相应的信号采集器、信号处理方法以及软件工作流程等。在现有研究及系统的支撑下,实施了探测实验,证明了用北斗反射信号探测目标的有效性,为进一步研究北斗信号在目标探测领域的应用作铺垫。
[1]郭洁,李国平.地基GPS探测水汽的发展与气象业务应用[J].大地测量与地球动力学,2007,27(S1):35-42.
[2]杨东凯,张其善.GNSS反射信号处理基础与实践[M].北京:电子工业出版社,2012:1-9.
[3]THOMPSON D R,ELFOUHAILY T M,GASPAROVIC R F.Polarization Dependence of GPS Signals Reflected from the Ocean[C]∥IEEE International Geoscience and Remote Sensing Symposium,Honolulu,HI:IEEE,2000:3099-3101.
[4]GLEASON S,HODGART S,SUN Y,et al.Detection and Processing of Bistatically Reflected GPS Signals from Low Earth Orbit for the Purpose of Ocean Remote Sensing[J].IEEE Trans on Geoscience and Remote Sensing,2005,43(6):1229-1241.
[5]亚历克斯·涅克拉索夫.利用天线可实现蛋形波束覆盖的机载雷达高度仪测量海风矢量[J].雷达科学与技术,2012,10(5):460-466.
[6]曹俊武,胡志群.多普勒天气雷达与风廓线雷达测风比较[J].雷达科学与技术,2013,11(6):605-610.
[7]严颂华,龚健雅,张训械,等.GNSS-R测量地表土壤湿度的地基实验[J].地球物理学报,2011,54(11):2735-2744.
[8]GUTMANN E D,LARSON K M,WILLIAMS M W,et al.Snow Measurement by GPSInterferometric Reflectometry:An Evaluation at Niwot Ridge,Colorado[J].Hydrological Processes,2011,26(19):1-46.
[9]丛力田.世界天基雷达技术发展概况[M].北京:国防工业出版社,2007:90-91.
[10]IDRIS A N,SULDI A M,HAMID J R A,et al.Effect of Radio Frequency Interference(RFI)on the Global Positioning System(GPS)Signals[C]∥IEEE 9th International Colloquium on Signal Processing and Its Applications(CSPA),Kuala Lumpur:IEEE,2013:199-204.
[11]DEFRAIGNE P,HARMEGNIES A,PETIT G.Time and Frequency Transfer Combining GLONASS and GPS Data[C]∥Joint Conference of the IEEE International Frequency Control and the European Frequency and Time Forum(FCS),San Fransisco,CA:IEEE,2011:1-5.
[12]UHRICH P,VALAT D.GPS Receiver Relative Calibration Campaign Preparation for Galileo In-Orbit Validation[C]∥EFTF-2010 24th European Frequency and Time Forum,Noordwijk:IEEE,2010:1-8.
[13]冉承其.北斗卫星导航系统的发展[J].卫星应用,2013(4):4-7.
[14]XU A,XU Z,GE M,et al.Estimating Zenith Tropospheric Delays from BeiDou Navigation Satellite System Observations[J].Sensors,2013,13(4):4514-4526.
[15]HE L,GE M,WANG J,et al.Experimental Study on the Precise Orbit Determination of the BeiDou Navigation Satellite System[J].Sensors,2013,13(3):2911-2928.
[16]杨东凯,王强,曹云昌,等.基于北斗反射信号的海面有效波高探测[J].高科技与产业化,2014(10):81-83.
[17]SONOWAL N,YADAV R,KANNAN S.Real Time GPS Software Receiver with New Fast Signal Tracking Method[C]∥IEEE Radio and Wireless Symposium,Orlando,FL:IEEE,2008:231-234.
猜你喜欢
建材发展导向(2022年6期)2022-04-18 08:17:34
创造(2020年7期)2020-12-28 00:48:22
测控技术(2018年6期)2018-11-25 09:50:18
电子制作(2018年19期)2018-11-14 02:36:40
中国公共安全(2017年11期)2017-02-06 05:27:52
电子制作(2016年1期)2016-11-07 08:42:41
无线电工程(2016年5期)2016-10-13 12:12:52
系统工程与电子技术(2016年4期)2016-08-24 07:46:04
太空探索(2015年9期)2015-07-12 12:54:45
时间频率学报(2014年2期)2014-06-21 08:44:54