
一种确定空管监视台站选址范围的方法∗
2015-01-22 09:47程延松孙清清
雷达科学与技术 2015年4期
程延松,孙清清,祝 亮,李 建,王 洪
(1.中国民用航空局第二研究所,四川成都610041;2.电子科技大学电子工程学院,四川成都611731)
0 引言
空管监视设备的科学选址具有重要意义,正确的选址可以充分发挥设备的优良特性和性能。选址范围是指在满足一定空域覆盖条件和站址设置场地规范下的站点可选择区域。理论上来说,选址的复杂度和选址区域面积是成正比的,选址范围越大则寻找最优站点位置的难度越高,因此减小选址范围可以很好地提高选址的效率。
传统的选址方法大多依据规划人员的实际经验,效率低而且不能系统地考虑所有影响因素[1-2]。为了改进传统选址方法,近年来国内外的一些研究单位都在积极探索新的技术,目的是使用计算机自动选址代替人工选址来提高选址的效率和科学性,并公开了相应文献。文献[3-5]提出了基于遗传算法进行组网布站,选出的站点基本满足了指定空域的覆盖要求,但是选址区域范围一般很大,导致算法的实现非常复杂,如果综合考虑设备选址的各类影响因素,减小选址范围,算法的效率可以得到大大提升。文献[6]提出了一种对空管ADS-B(广播式自动相关监视)设备进行自动选址的方法,主要思想是:先找到一个合理的选址范围,再对范围内的所有可选站点进行一一筛选,直到找出最优的站点位置。该方法预先对选址范围作了分析和界定,使得选址更加灵活高效,但是无法保证对重要空域的覆盖能力,而且对于一般的监视设备也并不通用。
为了提高监视设备的选址效率,本文提出了一种减小选址范围的分析方法,首先结合地形因素和设备覆盖特性通过反向视域分析方法得到选址范围的边界,再分析顶空盲区的影响,排除顶空盲区影响下不合理的选址区域,最后对其他选址的影响因素分别进行分析,逐步排除不合理的选址区域,最终可确定一个范围较小的选址区域。
1 反向视域分析方法
监视台站选址的空域覆盖目标是保证终端区内主要定位点(Air Fix Point,为保证航空器的正常航行而规定的空中位置点)和航线的连续覆盖,这要求站点位置具有尽可能低的屏蔽角,而地形或者高大建筑物等障碍物将直接影响到设备的覆盖特性,因此需要先对站点进行覆盖范围分析,即可视域分析。常规的选址方法一般是对区域内所有可能的站点作覆盖分析,结合GIS地形数据可得到各个站点的三维可视区域[7-8],最后选择满足空域覆盖要求的最优站址。但在实际选址过程中,选址区域的范围往往很大,对每个可能的站点都作覆盖分析会造成计算量很大,因此很难施行。
为了避免在一个大区域范围内对所有可能的站点都作覆盖分析,本文提出一种反向视域分析(Reverse Line-of-Sight,RLOS)技术,在满足空域覆盖要求的前提下缩小了站址选择区域的范围。反向视域分析与常规视域分析方法相反,不直接对每个可能的站点作可视分析,而是以管制空域内主要定位点为“视点”,设备作用距离为视距对各个方位分别作可视分析得到定位点的可视区域;在某个定位点的可视区域内设置站点能够确保设备对该定位点的绝对覆盖,在所有定位点可视域的交集区域内设置站点则可以确保设备均匀地覆盖这些定位点,即保证了设备的覆盖性能。下面给出反向可视域分析的数学描述方法。
对于判断空间内的任意两点P和Q是否可视引入变量ω(P,Q),定义如下:

可视性是相对的,如果Q代表空中的某个点对P代表的地面设备安装位置点可视,那么相反地面设备安装P点则能够覆盖空中的Q点。
对于描述管制空域内定位点{Pi,i=1,2,…,M}的可视区域引入可视点集合V(Pi),定义如下:

式中,VS为管制的空域,Qj为管制空域内的任意一个点。
反向视域分析方法将得到的各定位点可视区域的交集作为站址选择区域的范围:

实际进行反向视域分析时还可确定设备所需的塔台(天线)高度,如图1所示,对定位点C的一个方位作可视分析,在一个方位上就是二维可视性的分析问题,由图可知在A,B,C位置布站所需的天线高度分别为hA,hB,hC。如果在相同位置的不同定位点确定的塔台高度不同,则取最大值作为最终确定的天线高度参考值。实际在选择站点时天线的设置有高度限制,如果反向视域分析方法确定的某位置的天线高度参考值超过了限制高度则可说明该位置不适合设置站点,并在站址选择区域范围内剔除该位置。
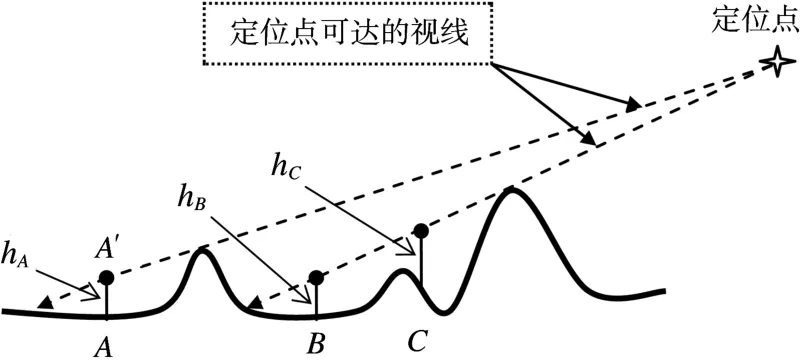
图1 一个方位上的反向可视域分析
对图1作进一步说明,以A点分析为例,在确定了塔台高度hA后,还需要判断A′点和C点的可视性,这里的可视性与一般性的可直视(Line-of-Sight)不同,需要同时考虑设备的作用距离,换言之,如果设备在A′点对C点可视就是设备能够覆盖到C点。可视性的判断问题将会在下一节展开讨论。
反向视域分析最终得到的是一个范围较小的选址区域,以及在该范围内设置站点所需要的天线高度。下面给出一个简化的反向视域分析的例子,如图2所示,假设终端管制空域的地面投影是一个圆形区域,空域内6个定位点的地面投影分别为点1,2,3,4,5,6,不考虑地形因素(忽略天线高度的影响)下以定位点在地面投影为圆心、设备最大作用距离为半径画圆作为简化的反向视域分析,得到的各个圆的共同覆盖区域可作为选址的区域。
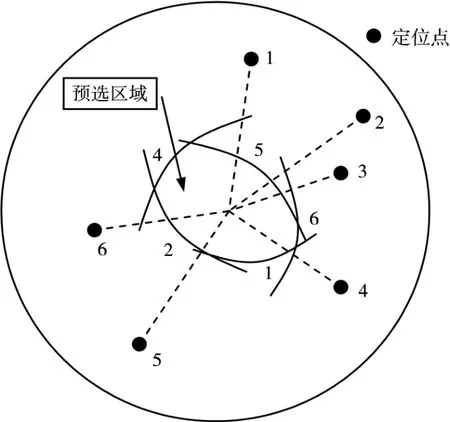
图2 反向视域分析方法确定选址区域
2 可视性分析
反向视域分析是一个三维的问题,但在不同方位的分析则转化为多个二维的问题。每个方位上进行反向视域分析都需要判断可视性,换言之,需要判断定位点是否能够被设备所覆盖。影响设备覆盖范围的因素主要涉及两个方面,即设备天线的垂直方向图和站点附近的地形或者建筑物等遮蔽物。本节将从这两个方面的影响因素出发推导出空间内任意点设备可视的条件。
在考虑设备天线方向图和遮蔽物条件下,目标能否被设备覆盖取决于目标与设备之间是否存在遮挡和设备的作用距离能否超过到达目标点距离。如图3所示,1,2,3分别表示3个不同的空中定位点,定位点1受到遮蔽物的影响设备无法覆盖到,定位点2和3不受到地形的遮挡,但设备的作用距离小于设备到定位点2的直线距离,定位点2设备也无法覆盖到,而定位点3同时满足了两个条件则设备可覆盖[9]。

图3 设备垂直剖面的“视线”
2.1 仰角和遮蔽角计算
判断目标是否被遮蔽需要比较障碍物遮蔽角与目标仰角之间的关系,本节内容将推导出仰角和遮蔽角的计算方法。
如图4所示,假设站点A天线高度为hA,定位点C高度为h,以天线位置E点为视点看定位点C的仰角为θ,地球等效半径为ka,O为地心位置,OA和OC的夹角为β,过C点作垂线交OA的延长线于D点,则有
由式(4)、(5)可得

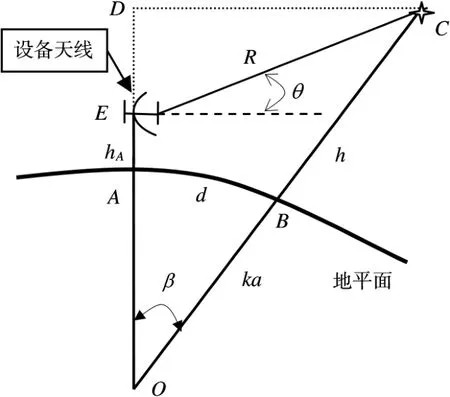
图4 定位点仰角示意图
因为β=d/ka,d≪ka,则sinβ≈β,cosβ≈1-β2/2,代入式(6)可得
同理如图5所示,在站点位置某方位存在距离为ds、高度为hs的障碍物时,可求得遮蔽角为θs,计算方法如下:


图5 遮蔽角示意图
为确保设备能够覆盖到目标,目标至少不能被遮蔽物遮挡,换言之需要满足目标仰角大于该方位上的所有遮蔽角,即可得到设备可视的第一个条件:θ>θs。
2.2 可视性条件
判断目标的可视问题还需要考虑站点到达目标的视在距离与设备天线的作用距离之间的大小关系。如图4中天线在仰角为θ下,到达定位点C的直线距离EC即天线到达定位点C的视在距离为

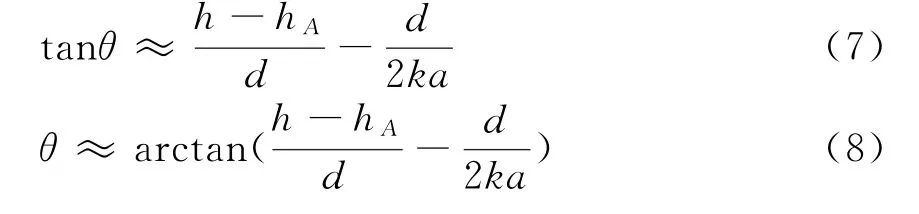
为简化模型不考虑天线增益、发射功率、电磁波,以及绕射特性等有关因素。典型二次雷达的最大作用距离约为360 km;雷达天线的归一化垂直方向图G(θ),如图6所示,高度角θ为4°时G(θ)为0 dB,高度角θ到50°时G(θ)下降到-20 dB[10]。
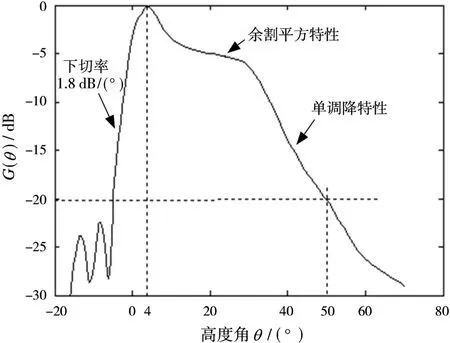
图6 天线垂直方向图
在仰角θ下,设备天线的实际作用距离为

式中,Rmax为设备的最大作用距离。为确保目标可视则需要满足第二个条件:Rs(θ)≤Rr(θ),即设备天线的作用距离应大于站点到达目标的视在距离。
结合第一和第二条件可知,空中定位点对于地面监视设备可视的条件是

3 站址选择影响因素分析
通过反向视域分析方法在保证了站点具有理想的覆盖效果,能够均匀地覆盖管制区域内的各个定位点和航线的前提下,缩小了选址的区域范围。为了进一步缩小预选区域,本节将对站址选择的其他各类影响因素进行分析。
3.1 设备天线顶空盲区影响分析
顶空盲区是由于监视设备采用方向性天线造成,天线正上方空域被信号无法覆盖到,形成一个锥状空域信号覆盖盲区,也称为锥间盲区。图6是典型的空管二次雷达天线垂直方向图,在大于20°以后呈现单调递减的趋势,作用距离也逐渐减小,到50°仰角位置天线增益衰减到-20 dB,作用距离减少为原来的1/10,形成的顶空盲区如图7所示。选择空管远程监视设备站点的配置位置时,应使设备的顶空盲区避开其所保障的主要航线以及主要的定位点。
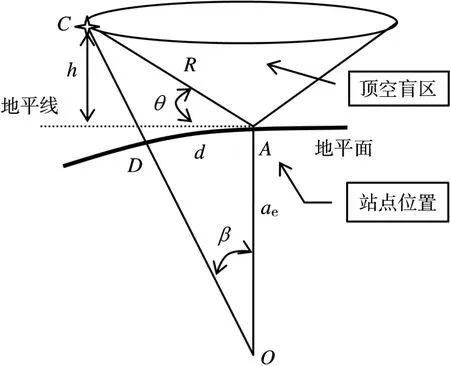
图7 设备顶空盲区
为使顶空盲区避开定位点,站点位置与定位点的水平距离不能太小,也就是在定位点正下方一个圆形区域内设置站点将使顶空盲区覆盖到定位点;对航线而言,航路两侧一定宽度内也不能设置站点。为此引入两个参数:定位点的不合理选址半径Rf和航线不合理选址宽度Wr,即航路两侧宽度为Wr的区域和定位点在地面投影为中心半径为rh的区域是不合理的选址区域。下面给出参数Rf和Wr的具体计算方法。
假设监视设备天线的垂直方向可视角度范围是0°到20°。如图7所示,C点为定位点或者航线上的某个点,高度为h,D点是C在地面上的投影,A是站点位置,A和D的地面距离为d,仰角θ取20°,O是地心位置,OA和OC的夹角为β。
由式(11)可以计算站点A到达定位点C的视在距离为

根据余弦定理可知:


当站点A到D点的距离小于d时定位点C点将落在顶空盲区内。对于定位点可相应计算出不合理选址半径Rf=d,对于航线可计算出不合理选址宽度Wr=d,进而可以得到定位点和航路的不合理选址区域如图8、图9阴影部分所示。
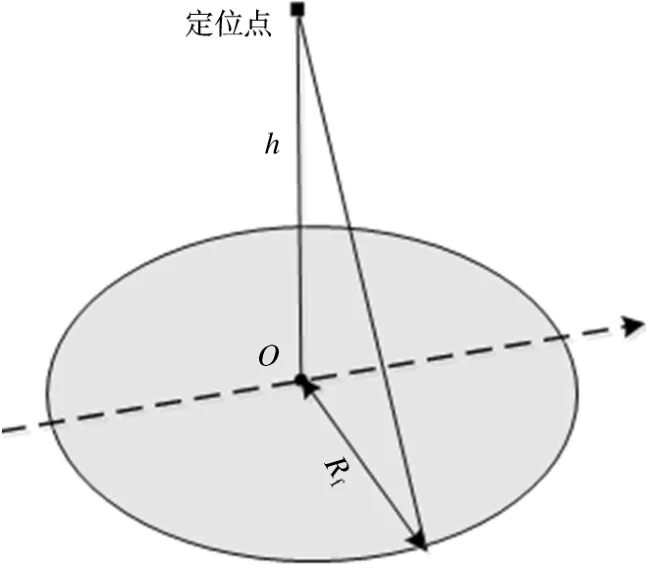
图8 定位点不合理选址区域

图9 航线单侧不合理选址区域
3.2 其他因素分析
空管监视设备站点选址还有一些其他方面的场地设置规范。如对于一次雷达和二次雷达要求:450 m范围内不能有高压输电线、密集居民楼和金属建筑物等;800 m范围内不能有气象雷达和高频炉等有源干扰的设施;远离高速公路铁路等[1]。对于这些因素的考虑需要在选址前收集大量的数据,在已知这些干扰源的位置前提下,一一剔除这些不合理的选址区域,从而达到缩小选址区域范围的目的。
4 结束语
本文深入分析了空管监视设备站址预选问题,提出反向视域分析方法确定选址范围的边界,并针对选址的各方面影响因素对不合理的选址区域分别进行剔除,最终达到减小选址范围的目的。该方法可结合GIS地理信息系统进行计算机自动确定选址区域范围,进而可在选址区域内选择最佳的几个位置作为候选站点,相比传统人工选址方法更加科学高效。
[1]空管行业管理办公室.MH/T 4003-1996航空无线电导航台和空中交通管制雷达站设置场地规范[S].北京:中国民用航空总局,1996:1-15.
[2]文冰梅.航管雷达辐射信号作用距离及覆盖问题的研究[D].天津:中国民航大学,2007.
[3]许有臣,朱衍波,张军,等.空管通信导航监视设备的布网优化的方法:中国,CN101650879B[P].2011-06-22.
[4]张远,方青,曲成华.基于遗传算法的组网雷达优化部署[J].雷达科学与技术,2014,12(1):76-80.ZHANG Yuan,FANG Qing,QU Cheng-hua.Optimal Deployment of Netting Radars Based on Genetic Algorithms[J].Radar Science and Technology,2014,12(1):76-80.(in Chinese)
[5]孙清清,祝亮,李建,等.基于多约束NSGA2算法的空管监视台站优化选址[J].电讯技术,2014,54(10):1366-1371.
[6]BOCI E.RF Coverage Analysis Methodology as Applied to ADS-B Design[C]∥2009 IEEE Aerospace Conference,Big Sky,MT:IEEE,2009:1-7.
[7]邱航,陈雷霆,蔡洪斌.复杂环境影响下雷达探测范围三维可视化[J].电子科技大学学报,2010,39(5):731-736.
[8]邱航,陈雷霆.地形影响下雷达作用范围三维可视化研究[J].电子测量与仪器学报,2010,24(6):528-535.
[9]汪玥,苏志刚,高益寰,等.二次监视雷达覆盖性能分析[J].信号处理,2009,25(8A):607-610.
[10]空管行业管理办公室.MH/T 4010—2006空中交通管制二次雷达设备技术规范[S].北京:中国民用航空总局,2006:10-15.
猜你喜欢
社会科学战线(2022年8期)2022-10-25
信号处理(2022年6期)2022-07-22
保健医苑(2021年9期)2021-09-08
冰雪运动(2020年1期)2020-08-24
武术研究(2020年2期)2020-04-21
电子制作(2019年14期)2019-08-20
煤炭工程(2019年6期)2019-06-22
舰船电子工程(2018年10期)2018-10-23
党的生活·党员电教与远程教育(2017年9期)2017-10-17
故事会(2016年21期)2016-11-10
