
一种远程相控阵雷达单帧搜索参数优化方法∗
2015-01-22 09:47胡明明谭怀英公绪华袁振涛
雷达科学与技术 2015年4期
胡明明,王 红,谭怀英,公绪华,袁振涛,肖 松
(1.空军预警学院研究生管理大队,湖北武汉430019;2.空军预警学院二系,湖北武汉430019;3.95899部队,北京100085)
0 引言
近年来,临近空间高超声速目标(NSHT)发展迅速,其高速、高机动、散射截面积小给预警探测系统提出了很大挑战[1]。相控阵雷达具有波束指向捷变、波形选择多样、工作参数设置灵活的特点,特别是大型地基相控阵雷达,发射功率大、作用距离远,通过设置合理的雷达工作方式和控制参数,可搜索发现NSHT。
在探测临近空间目标工作方式下,如何设置工作参数需要研究。关于相控阵雷达搜索参数优化设计的文献较多,文献[2-3]研究了影响相控阵雷达搜索性能的各个参数,并分析了合理的参数设置可实现雷达资源有效利用。文献[4]在文献[3]的基础上,建立了相控阵雷达在搜索资源受限条件下搜索性能优化模型,提出了一种基于最大跟踪起始距离的搜索参数优化方法。文献[5]从降低雷达截获概率、提高机载相控阵雷达生存能力角度出发,提出了一种基于射频隐身的雷达搜索参数设置方法。文献[6]建立了以捕获时间为目标函数的搜索性能优化模型,在搜索资源下降时,提出通过单独或同时调整单次检测概率和搜索帧周期的参数优化策略。上述方法都是针对多帧搜索的参数优化设计,主要讨论的是搜索帧周期对搜索性能的影响,没有研究单次驻留时间内的参数优化设计。文献[7]针对单帧搜索,从理论上给出了一种基于最大积累检测概率的搜索参数优化模型,对单次检测概率大小进行了优化分析。
本文根据NSHT目标特性,针对单帧搜索提出了一种基于最小捕获时间的搜索参数优化模型,对脉冲重复周期取值进行了优化设计。
1 NSHT目标特性对相控阵雷达探测影响分析
1)飞行速度快,其速度可达到5~25 Ma。目标高速运动会造成回波产生距离走动[8],影响雷达信号的积累检测。对于高速目标宜采用窄带信号克服目标距离走动,或采用对距离走动进行补偿的信号处理方法[9]。
2)雷达散射截面积小,变化范围为0.01~0.1 m2。临近空间大气环境复杂,NSHT在大气层高超声速飞行时,飞行器与大气强烈作用,会产生等离子体鞘套现象,严重影响目标的RCS特性,不同速度、不同高度飞行时RCS值起伏变化大。
3)巡航高度高,区间范围大,高度范围在20~100 km之间,甚至存在雷达过顶飞行,对搜索范围提出很高要求。
4)机动能力强,可承受过载2~5 g,飞行轨迹多变,可实现波浪式跳跃飞行,给搜索发现和稳定跟踪带来困难。
2 远程相控阵雷达探测NSHT工作模式
2.1 雷达的工作方式
相控阵天线波束可在方位和仰角上进行二维相位扫描,可快速改变波束指向和波形参数,能实现的雷达工作方式较多。根据执行任务的不同,远程相控阵雷达有不同的工作方式,如弹道导弹探测工作方式、临近空间目标探测工作方式、飞机探测工作方式、弹道导弹和临近空间目标同时探测工作方式、弹道导弹和飞机同时探测工作方式等,每一种工作方式对应着不同的工作参数和波形设计。本文就临近空间目标探测工作方式下,研究单帧搜索脉冲重复周期的优化设计。
2.2 雷达对NSHT的预警时间与搜索方式
如图1所示,巡航段NSHT飞行高度h在20~100 km范围内,雷达波束仰角为θ,雷达的探测距离为L,地球等效半径为re,考虑电磁波在大气中的折射效应re取值为8 490 km,根据几何关系可以得出

当θ=0°,θ=1°,θ=3°,θ=90°时,根据式(1)可计算得到雷达对NSHT的探测距离与目标高度的关系,如图2所示。

图1 NSHT飞行高度与雷达探测距离几何关系

图2 NSHT飞行高度与雷达警戒距离的关系
波束仰角低时,对NSHT的探测距离远,受地物的遮挡θ不能选得太低。当选择波束仰角θ=1°时,雷达警戒距离在500~1200 km之间。当目标的径向速度为1,3,5和10 Ma时,预警时间与目标高度的关系如图3所示。

图3 NSHT高度与预警时间的关系
可见,地基远程相控阵雷达对NSHT的预警时间十分有限,对于径向速度5 Ma的目标最大预警时间约为10 min,搜索方式设计时应考虑预警时间的需求。
考虑到探测NSHT预警时间的需求,地基远程相控阵雷达探测NSHT应在有目标指示数据下进行小区域搜索,指示数据可以来自上级指挥所或其他传感器(如预警卫星)的探测信息。远程相控阵雷达常用搜索屏方式进行搜索,对重点搜索空域的范围设置不宜过大。本文主要考虑波束单次驻留时间内探测NSHT脉冲重复周期优化设置问题,故对搜索区域的大小不进行讨论。
2.3 雷达单次驻留搜索分析
远程相控阵雷达波束在单次驻留时间内,在目标方向发射M个脉冲,脉冲的重复周期为Tr,接收机将M次回波进行积累检测,当积累检测概率达到一定值时,可认为雷达已将目标捕获,从初始检测到捕获目标的这段时间定义为捕获时间Tb。捕获时间表示为

Tb满足目标穿越波束最短时间的约束:

式中,Tpass为目标穿越波束的最短时间,R为目标距离,θ为垂直方向波束宽度,v为目标垂直穿越波束的速度。
根据相控阵雷达作用距离方程[10]可得

式中:Pav为雷达平均发射功率(W);Gt为发射天线增益;Gr为接收天线增益;λ为雷达波长(m);σ为目标的雷达散射截面积RCS(m2);k为玻耳兹曼常数;T0为室温下接收机噪声温度(T0=290 K);Fn为接收机噪声系数;L为雷达系统损耗;SNR0为发射单脉冲时接收机回波的信噪比;CB为带宽校正因子,它表示接收机带宽失配所带来的信噪比损失,匹配时CB=1;Tr为脉冲重复周期。

由式(4)可得出单脉冲照射条件下雷达接收机的输出信噪比为称为距离因子,对于一部已知雷达,在其他参数固定的情况下,距离因子Ω0是关于目标距离R的函数。因此,雷达接收机输出的信噪比是关于脉冲重复周期和目标距离的函数,搜索目标的距离确知时,信噪比与脉冲重复周期相关。
NSHT在巡航段飞行时属于斯威林Ⅰ型目标,检测概率与虚警概率、接收机信噪比之间的关系满足估计[7]如下:

将式(5)代入式(6),可得

假设NSHT巡航段飞行时,其相对雷达的径向速度为V,由于雷达作用距离很远,可忽略雷达波束单次驻留时间内目标距离的变化,认为单次检测概率pd是不变的。故M次积累后的检测概率为

3 单帧搜索脉冲重复周期优化设计
3.1 基于最小捕获时间的搜索参数优化模型
雷达脉冲重复周期的选择需要综合考虑各种因素,主要有雷达发射机的占空比约束为

式中,τmin为脉冲宽度最小值,qmax为占空比的最大值,远程相控阵雷达占空比一般在0%~30%之间,若τmin=1 ms,qmax=25%,Tr需要大于4 ms。另外,Tr变化,为保持Pav不变,τ应随之变化,Tr的取值满足下式约束:

式中,Pt为发射机峰值功率,τmax为发射机允许的脉冲最大宽度,若Pt/Pav取4,τmax=10 ms,Tr需要小于等于40 ms。
Tr还应满足目标探测最远距离的约束为

式中,Rmax为目标最大探测距离,c为光速。如对于NSHT最大探测距离为1 200 km时,Tr需要大于8 ms。
雷达单帧搜索时,完成对目标的检测过程中,捕获时间越小越好,故建立优化模型为

一定检测性能要求下,例如积累检测概率pcd要求为0.99,虚警概率pfa要求为10-6,根据式(12),目标捕获时间是关于脉冲重复周期的函数,对式(12)用数学方法求Tb关于Tr的极值可得到最优脉冲重复周期的值。
3.2 仿真分析
依据美国铺路爪雷达性能设置仿真参数,如表1所示。

表1 仿真参数设置表
根据式(12),对于NSHT,pcd=0.99,pfa=10-6,当Rmax=1 200 km时,Ω0=1 531;当Rmax=1 100 km时,Ω0=2 168。通过仿真计算,得到目标捕获时间和脉冲重复周期之间的关系,如图4所示。
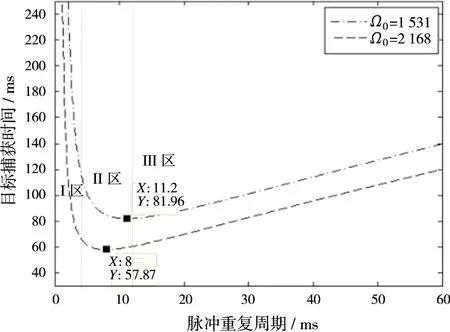
图4 目标捕获时间与脉冲重复周期间的关系
当Ω0(R)由雷达系统和探测距离确定后,捕获时间长短与脉冲重复周期大小关系曲线就可以确定,存在一个最优取值的问题。假设Tr=Tr0时,捕获时间Tb取得最小值。根据图4的仿真数据,可将Tr分成三个区域:Ⅰ区,当Tr<4 ms时,这个区段捕获时间对脉冲重复周期的大小十分敏感,Tr小的变化会引起Tb较大的变化,受临近空间目标探测距离的要求,Tr应大于4 ms,故Tr的选择应该避开这一区域;Ⅱ区,4 ms<Tr<Tr0时,Tb随Tr缓慢下降,在Tr0时取得最小值;Ⅲ区,Tr>Tr0时,单个脉冲的检测概率pd逐渐增大,需要的积累次数M减小,目标捕获时间随脉冲重复周期值的增加有微小的增加,根据雷达系统参数设置要求Tr的值应在Ⅱ区或Ⅲ区取得。
目标出现的距离不同,雷达距离因子大小不同。为了尽快捕获到目标,雷达的脉冲重复周期应选择不同的值,根据式(12),仿真得到距离因子、最小捕获时间、最佳脉冲重复周期和积累次数与目标距离之间的关系,如图5所示。
由图5可见,当目标距离减小时,距离因子迅速增大,雷达系统检测能力增强,目标最小捕获时间减小,对应的最佳脉冲重复周期和积累次数随着减小,以保证捕获时间最小。如果脉冲重复周期取恒定值15 ms,捕获时间随距离的变化如图6所示。
可见,采用最佳脉冲重复周期,能减少目标的捕获时间。不同距离的目标选择不同的脉冲重复周期,能有效缩短目标的捕获时间。这些时间可用于其他目标的搜索或跟踪,提高了相控阵雷达的工作效率。

图5 搜索参数与目标距离之间的关系

图6 两种方法捕获时间对比
4 结束语
通过定义远程相控阵雷达单帧搜索目标的捕获时间,建立了单帧搜索参数优化模型,分析了捕获时间与脉冲重复周期之间的关系。在一定雷达系统参数下,通过仿真得到了远程相控阵雷达临近空间目标探测工作方式的最佳脉冲重复周期值。探测目标处于不同距离时,选择对应的最佳脉冲重复周期,可显著降低目标的捕获时间,节省了雷达系统宝贵的时间资源。
[1]汪连栋,曾勇虎,高磊,等.临近空间高超声速目标雷达探测技术现状与趋势[J].信号处理,2014,30(1):72-85.
[2]BILLAM E R.Parameter Optimization in Phased Array Radar[C]∥International Conference on Radar,Brighton:IET,1992:34-37.
[3]ZATMAN M.Radar Resource Management for UESA[C]∥IEEE Radar Conference,[S.l.]:IEEE,2002:73-76.
[4]卢建斌,胡卫东,郁文贤.相控阵雷达资源受限时最优搜索性能研究[J].系统工程与电子技术,2004,26(10):1388-1390.
[5]张贞凯,周建江,汪飞,等.机载相控阵雷达射频隐身时最优搜索性能研究[J].宇航学报,2011,32(9):2023-2028.
[6]邓桂福,刘华林,胥雷.远程相控阵雷达搜索参数优化设计[J].雷达科学与技术,2012,10(1):32-36.DENG Gui-fu,LIU Hua-lin,XU Lei.Optimization of Search Parameters of Long Range Phased Array Radar[J].Radar Science and Technology,2012,10(1):32-36.(in Chinese)
[7]胡卫东,郁文贤,卢建斌,等.相控阵雷达资源管理的理论与方法[M].北京:国防工业出版社,2010:52-57.
[8]王远模,马君国,付强,等.高速运动目标的积累检测研究[J].现代雷达,2006,28(3):24-27.
[9]谢纪岭,王彩云.基于距离走动校正和多普勒高阶项补偿的高超音速目标检测方法[J].宇航学报,2011,32(9):2002-2008.
[10]张光义,赵玉洁.相控阵雷达技术[M].北京:电子工业出版社,2006:62-65.
猜你喜欢
信息通信技术(2022年2期)2022-05-31
煤气与热力(2021年3期)2021-06-09
有色设备(2021年4期)2021-03-16
成都信息工程大学学报(2021年6期)2021-02-12
舰船科学技术(2020年3期)2020-04-22
电子制作(2019年24期)2019-02-23
雷达学报(2018年3期)2018-07-18
北京航空航天大学学报(2017年10期)2017-04-20
现代防御技术(2016年1期)2016-06-01
弹箭与制导学报(2015年1期)2015-03-11
