
基于倾角传感器技术的全地形水平运载系统
2015-01-17 05:46赵丽琴冯靖凯
电子设计工程 2015年1期
张 强,赵丽琴,黄 卓,冯靖凯,郭 梁
(中北大学 机械与动力工程学院,山西 太原 030051)
足式机器人是现代机器人技术发展的前沿,相比于轮式和履带式机器人,具有更加优良的非结构化环境通过性,对各种地面有很强的适应能力,不易陷入松软地面里,在这种背景下,多足步行机器人的研究蓬勃发展起来。
1)多足步行机器人的运动轨迹是一系列离散的足印,运动时只需要离散的点接触地面,对环境的破坏程度也较小;可以在可能到达的地面上选择最优的支撑点,对崎岖地形的适应性强。
2)多足步行机器人的腿部具有多个自由度,使运动的灵活性大大增强。
3)多足机器人的的身体与地面是分离的,当机器人需要携带物品时,首先将腿部固定,然后精确控制身体在三维空间中的运动,就可以达到对对象进行操作的目的。
另外,在全地形的运动中不可避免会有颠簸状态,运输特殊货物时需要尽可能避免这种现象的发生,因此,本设计是一种能够实现自动化、高精度的水平调节装置,采用高精度倾角传感器采集摆动过程中平板的角度数据,将所采样的数据转换成角度反馈给单片机,由此控制步进电机的转动量来达到一定的输出,从而控制平板的升降调节来保持平衡。这种自动化的、较高精度的水平调节装置在生产和生活中会有较为广泛的应用前景,尤其在国防领域,如导弹的移动发射[8]。
1 六足机器人的设计与制作
1.1 机械部分
参考目前市面上的六脚仿真机器人,我们选用硬铝合金和亚克力板作为机器人身架的主要材料,这样机器人既能满足强度要求,也能满足轻便性要求。

图1 机械结构的总立体图Fig.1 The mechanical structure of stereogram
机器人整体采用对称式结构,由六只脚和底架(身体)组成。每只脚有3个关节,每个关节处采用舵机连接,所用舵机型号为:MG996R舵机,可在固定平面内旋转180°。
其中舵机1控制机器人脚前后摆动;舵机2控制机器人上下摆动;舵机3控制机器人内外伸缩。3个舵机配合即可实现机器人腿部在三位平面内的摆动。
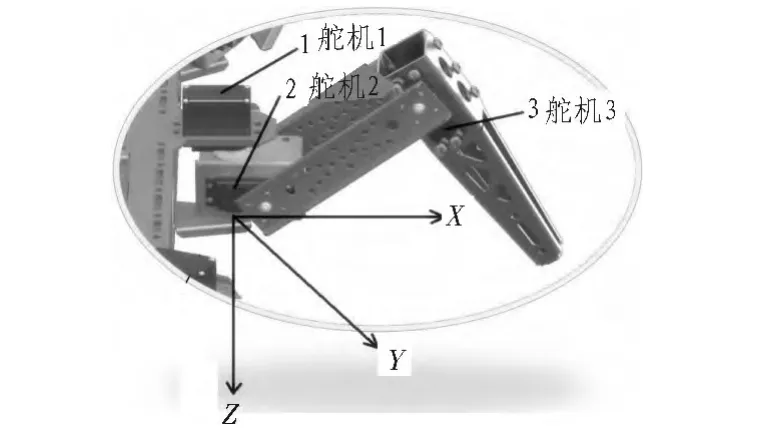
图2 1、2、3分别为三个不同位置的舵机Fig.2 Three different location of the steering gear
机器人身体、腿部均布满各种镂空图案,主要有3点作用:1)减轻机器人重量;2)增加机器人的美观度;3)作为安装和定位孔。
机器人采用对称式结构,主要尺寸大致为:机器人全长:250.0 mm;底架(身体宽):220.0 mm;机器人身高(正常工作):170.0 mm;“舵机 1”距“舵机 3”距离:90.0 mm;Leg2 长度:195.0 mm;Leg3长度:390.0 mm。
1.2 舵机及其舵机控制板控制系统
舵机是一个通过输出轴的转动来控制物体转动的装置。它在特定编码的驱使下可以转动到工作范围内的任意给定位置。因为它的轻便,位置控制简易且精确,在机器人中使用尤多。多舵机的协调工作可满足机器人的多自由度要求。舵机可以实现0~180°的旋转,而舵机的转动角度控制是由加载在控制线上的脉冲周期完成的,即所谓的脉冲编码调制。
选用32路舵机控制板QSC32E型,来协调18个舵机的动作。
舵机控制板的使用:
1)在使用控制板前,需给控制板提供4.8~7.5 V的直流电。
降压二级管“-”接 VSS,舵机板 VSS接高电压,舵机板“+”接降压后电压,降压二极管是把电池电压从7.4-8.4整体降压 6.2~7.2 V。
2)USB调试:①安装驱动。使用MINI-USB线连接上舵机板,找到相对应WINXP/WIN7_QSC舵机控制器(PL2303)的驱动;②双击打开上位机软件Q-Robot_Servo_Control,如图3所示。
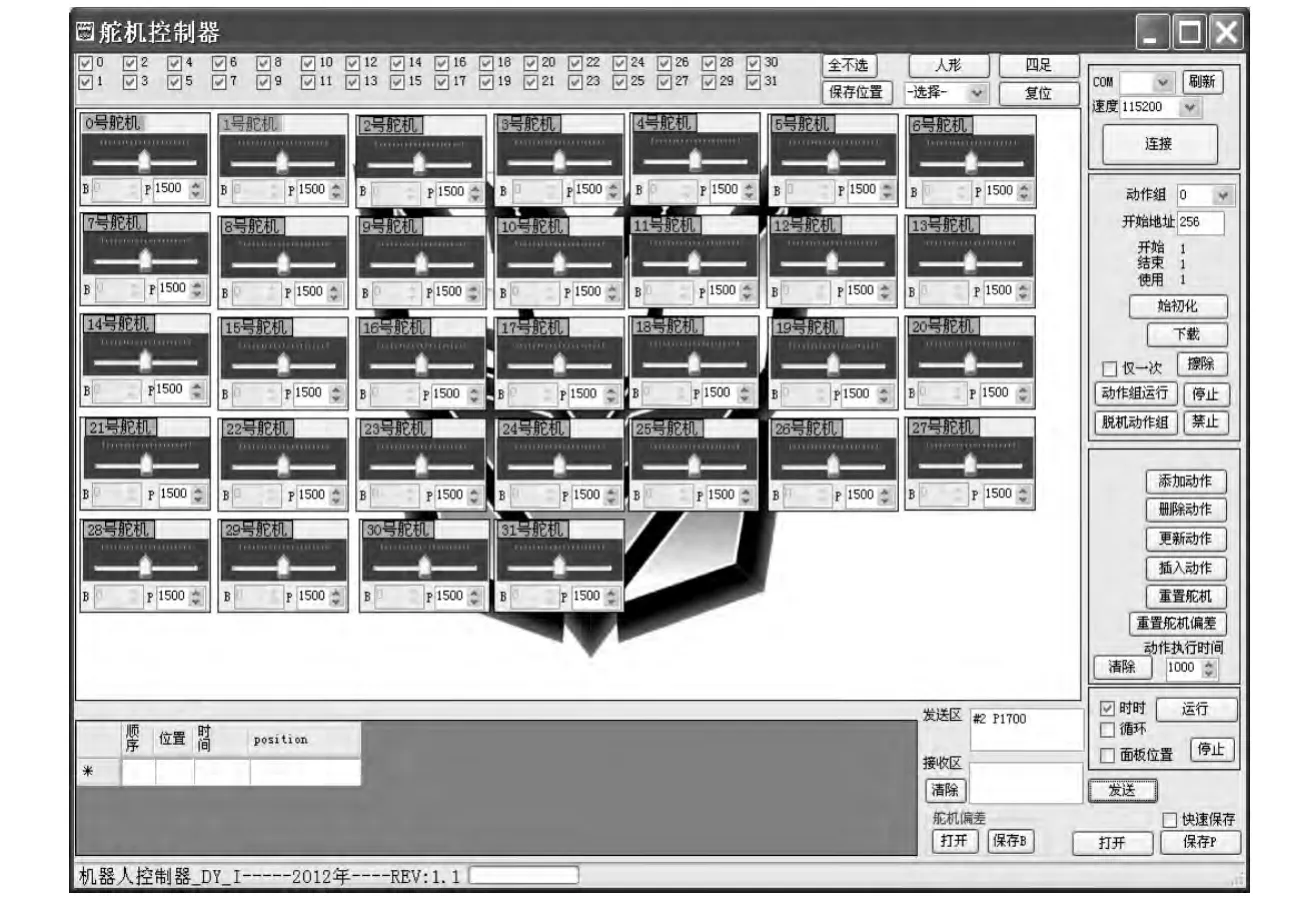
图3 上位机软件界面Fig.3 PCsoftware interface
另外,本机器人通过PS2无线遥控手柄控制其动作组的运行。32路舵机控制板上扩展有PS2控制模块。
1.3 机器人动作步态规划和程序编写
1.3.1 步态介绍
本设计只选取了机器人的三脚,四脚和波动 (五脚)步态,作为设计。设定L1、L2、L3分别是机器人的左前腿、左中腿、左后腿;R1、R2、R3分别是机器人的右前腿、右中腿、右后腿。在编写行走步态程序前,首先要建立几个数组,储存各个舵机标号及初始数据。如下:
1.channelno[18]={0,1,2,3,4,5,6,7,8,31,30,29,28,27,26,25,24 23};
2.initposi[18]={900,755,785,655,810,820,680,714,920,645,750,715,785,750,755,890,825,815}; //身体水平
3.initposi1[18]={900,655,685,655,710,720,680,614,820,645,850,815,785,850,855,890,925,915}; //抬高身体
4.initposi2[18]={900,855,885,655,910,920,680,814,1020,645,650,615,785,650,655,890,725,715}; //身体下沉
1.3.2 三脚步态
三脚步态,它是六脚机器人行走时,速度最快但也最不稳定的一种步态。它将机器人六只脚分成两组,L1,L3和R2一组,R1,R3和L2一组。机器人行进时两组腿交替前摆和着地后拨。在两组腿交接时,瞬间六条腿同时着地,是为了增强机器人的稳定性。编程序时,将机器人每条腿单周期T分为四个步骤,分别是上抬,前摆,下落,后摆。设定,四个步骤的时间分别为 T1,T2,T3 和 T4(下同).T1+T2+T3=5T/12(T1,T2,T3 均为 5T/36),T4=7T/12; 机器人行进规则为 R1,L2,R3 一起抬腿,7T/12之后 R2,L3,L1一起抬腿,然后依次循环[2]。 如图4所示,黑色表示腿着地,白色表示腿腾空。
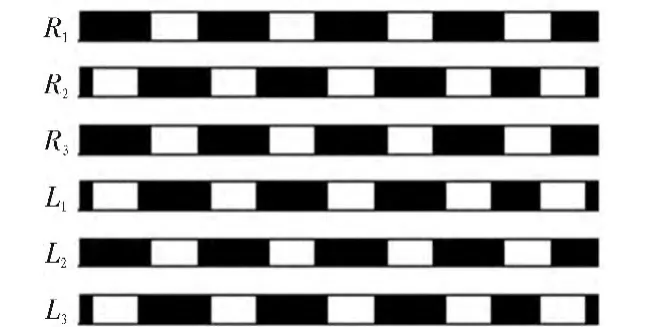
图4 运动循环图Fig.4 Motion cycle chart
另外,还有左右转,俯卧撑,舞蹈,螃蟹步等行动步态。
1.4 测试与结果分析
左右转,以左转为例。在四脚步态基础上修改而成,只是每一组脚起步时,左脚起脚前迈,而右脚起脚后摆。其顺序为:
左脚:抬腿——前摆——下落——后摆
右脚:抬腿——后摆——下落——前摆
此六脚机器人的创新之处:
1)控制方式多样化,本六脚爬虫机器人采用无线遥控,还可以外接单片机控制。
2)动作多样化,设计了多种展示动作,开发者可以直接输入不同的参数就可以变换机器人的动作,增强了机器人的二次可开发性[6]。
2 水平调节装置的结构原理和设计
2.1 水平装置的工作原理
本设计制作一个自动调平的平板控制系统,在平板倾斜的过程中,利用电机控制平板,倾角传感器测量平板水平方向倾角来确定平板何时达到平衡,主要由以下3大部分组成:
1)水平平板框架(图5):包括万向球形链接支架等,起支撑作用,平板位于装有竖直连杆的支架上;2)检测系统(图6):通过传感器检测出平板工作台的角度变化,指示出不平衡度的大小,并经过一系列的单片机数据处理后,控制步进电机的运转;3)液压机构(图8):液压机构通过步进电机的转动量来达到一定的输出,在达到平衡状态时,高压油管处的舵机开关启动,关闭高压通道,锁存平衡状态。
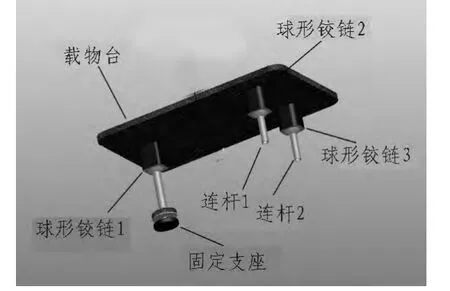
图5 万向载物台Fig.5 Universal objective table
2.2 水平装置的设计
2.2.1 感应区
如前所述,这一部分被用于感应调节载物台面相对于水平面的倾斜情况。本设计采用高精度双轴倾角传感器模块作为感应区核心元件,该传感器可以检测上/下/左/右—4个方向的倾斜角度,检测范围是+900。当平板相对于地面有倾斜角度时,与平板相连的倾角传感器即可检测出相应的倾斜角度数据,反馈给单片机进行相应的处理[3]。
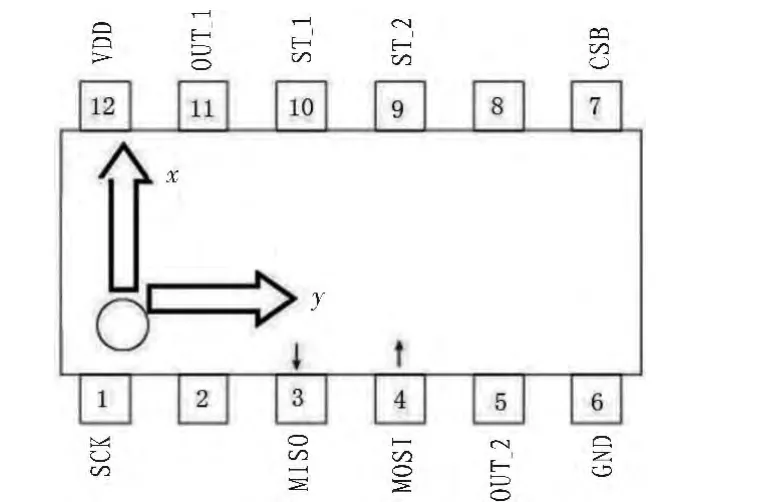
图6 SCA100T接口Fig.6 Interface of SCA100T
2.2.2 处理区
检测模块中的倾角传感器将检测到的倾角数据链接到单片机的I/O上,单片机将对应的倾角数据编入程序中,并传入与驱动模块相连的I/O串口上[1]。如图7所示的电路图。
2.2.3 执行区
从处理区传出的执行信号进入驱动器后,控制步进电机的转速与转动角度,当阀芯向右移动后,舵机开始运行,打开高压油的开关,高压油从左侧进入油缸,右侧的油被压入油池,导杆右移。由于此液压机构属于二阶非线性系统,所以采用步进电机1进行反馈后的补偿,从而使得系统正确。当检测到调整平衡时,舵机反转,关闭高压油通道,锁存此时的平衡状态,在纠偏后使得系统时时调节,保持平衡状态。它将控制步进电动机的运行,进而控制导杆的升降,以实现载物台的水平调节[4]。
3 结 论
1)该全地形水平运载机器人的设计采用无线遥控全地形六足步行机器人,控制方式多样化,而且利用机器人自由度多的特点,设计了多种展示动作,编写软件都已成型,开发者可以直接输入不同的参数就可以变换机器人的动作,增强了机器人的二次可开发性[5];
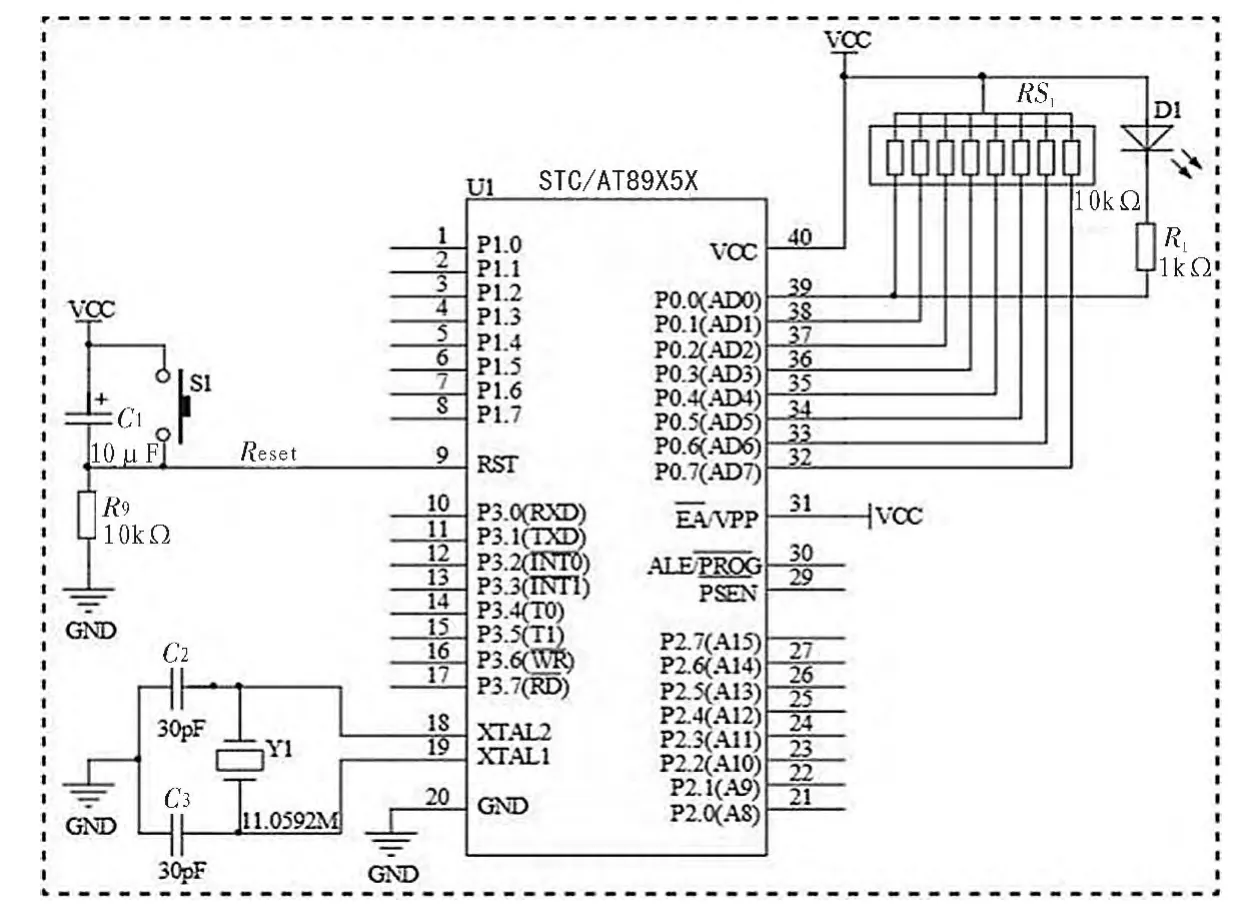
图7 单片机控制电路Fig.7 Single chip microcomputer control circuit
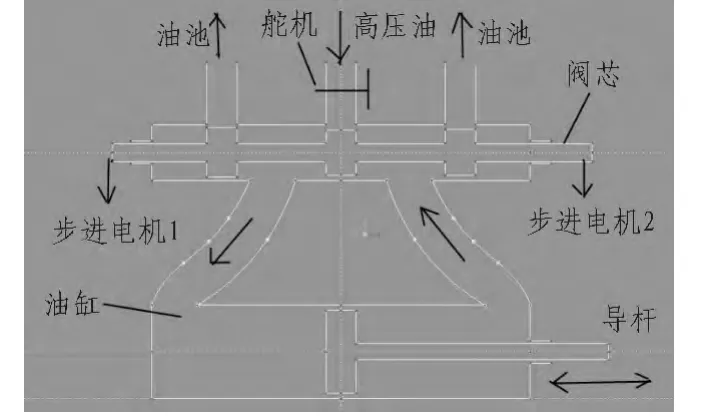
图8 液压机构Fig.8 Hydraulic unit
2)自行设计的自动调节水平装置是通过倾角传感器测量地面与水平面的倾斜情况,并由单片机和驱动器控制步进电动机的运行,同时,此液压机构属于二阶非线性系统,所以采用步进电机进行反馈后的补偿,从而使得系统正确。这种自动化的、较高精度的水平调节装置可以实现全地形下的水平运载。
这两大创新点的结合共同构成全地形水平运载机器人,实现全地形中的行走以及水平运输的功能。
随着对多足步行机器人的研究的日益深入和发展,多足步行机器人在速度、稳定性、机动性和对地面的适应能力等方面的性能都将不断提高,自主化和智能化也将逐步的实现,从而使其能够在更多特殊环境和场合中使用,因而具有广阔的应用前景[7]。
[1]曹建树.51单片机实用教程[M].北京:中国石化出版社,2010.
[2]童诗白.模拟电子技术基础[M].3版.北京:高等教育出版社,2001.
[3]黄智伟.全国大学生电子设计竞赛训练教程[M].北京:电子工业出版社,2005.
[4]刘勇,蒲如平,敬兴久,等.一种新型的对接装配装置的设计[J].机械工程,2001,24(11):66-69.LIU Yong,PU Ru-ping,JING Xing-jiu,et al.A new type of docking assembly device design[J].Journal of Mechanical Engineering,2001,24(11):66-69.
[5]王兵,蒋蓁.模块化重构机器人技术的现状与发展综述[J].机电工程,2008,25(5):1-4.WAN Bin,JIANG Qin.The present situation and development of modular reconstructing robot technology[J].Mechanical and Electrical Engineering,2008,25(5):1-4.
[6]杨若霁,陈峰.六足步行机器人腿机构绳传动系统设计与仿真[J].组合机床与自动化加工技术,2012(3):89-93.YANG Ruo-ji,CHENG Feng.Six-legged walking robot leg mechanism line transmission system design and simulation[J].Combination Machine tools and Automatic Processing Technology,2012(3):89-93.
[7]唐晶晶.六足减灾救援仿生机器人虚拟样机研究 [D].南京:南京林业大学,2011.
[8]靳飞,韩峤祎.可拆卸自平衡担架床的研究与设计[J].机械设计与制造,2013(2):69-73.JIN Fei,HAN Qiao-yi.Study and design of a detachable selfbalancing stretcher bed[J].Machinery Design&Manufacture,2013(2):69-73.
猜你喜欢
科学大众(2021年19期)2021-10-14
北京汽车(2021年3期)2021-07-17
科学大众·小诺贝尔(2021年10期)2021-01-22
自动化学报(2019年6期)2019-07-23
电子制作(2019年23期)2019-02-23
电子制作(2018年1期)2018-04-04
制造业自动化(2017年2期)2017-03-20
火控雷达技术(2016年2期)2016-02-06
西部广播电视(2015年20期)2015-10-20
舰船科学技术(2015年8期)2015-02-27
