增程式电动汽车发动机多工作点控制策略
2015-01-15 05:49:28王笑乐陈凌珊孙逸神
服装学报 2015年1期
王笑乐, 干 频, 陈凌珊 , 程 伟, 孙逸神
(1.上海工程技术大学 汽车工程学院,上海201620 ;2.上海汽车集团股份有限公司,上海201804)
增程式电动汽车(Extended-Range Electric Vehicle,E-REV)动力系统配备了大功率电池且发动机与驱动轮间无机械连接[1],发动机工作状态不受负载需求功率直接影响,发动机控制策略具有多样性。目前E-REV 发动机常用的控制策略有恒温器控制、功率跟随控制以及引申得到的恒温器+ 功率跟随控制[2],三者均存在一定缺陷。恒温器控制下电池经常大电流充放电,对电池寿命不利;功率跟随控制下发动机波动频繁,对发动机的效率、排放及NVH 性能造成影响;恒温器+功率跟随控制在一定程度上弥补了各自单独控制的缺陷,但其主体思想仍基于功率跟随控制,因此功率跟随策略的不足在这种模式下依然存在。
多工作点控制策略的思想是使发动机工作于多个效率较高的优秀工作点,既能避免功率跟随模式下效率不高的缺陷,又能防止恒温器控制模式下当电池电量(State of Charge,SOC)较低时,整车需求功率过大导致发动机转速突然升高而引发增程器振动噪声较大的不足[3-4]。控制策略中工作点的选择结合车辆行驶的最大需求功率、增程器效率及油耗、发动机转速等约束条件,各工作点间切换逻辑基于车速、动力电池SOC、整车控制器需求功率而设计。多工作点控制比恒温器控制更能满足顾客接受度,由于合理利用了车辆行驶时的路面噪声和空气噪声对发动机噪声的掩蔽效应,发动机噪音级别随着车速提高,从而改善了整车NVH 性能[5]。
1 概 述
1.1 E-REV 动力系统工作模式
E-REV 动力系统具有两个动力源:增程器(发动机发电机组)和动力电池组,使其具备混合动力和纯电动车的综合特征[6](见图1)。电量充足时无需增程器额外提供功率仅依靠动力电池驱动电机行驶,具有纯电动车零污染、低噪音的优点;随着行驶里程的增加,当电池电量低至某一门限值,开启增程器发电驱动车辆,延长续驶里程[7-8]。
具体而言,E-REV 的运行模式有纯电动行驶模式、并行驱动模式、行车发电模式和制动能量回收模式,如图2 所示[9]。
发动机主要在串联驱动模式和行车充电模式下参与工作,串联驱动经常出现在中低速加速或高速行驶时,行车充电则主要出现在中低速平稳行驶且电池SOC 值较低时[10]。
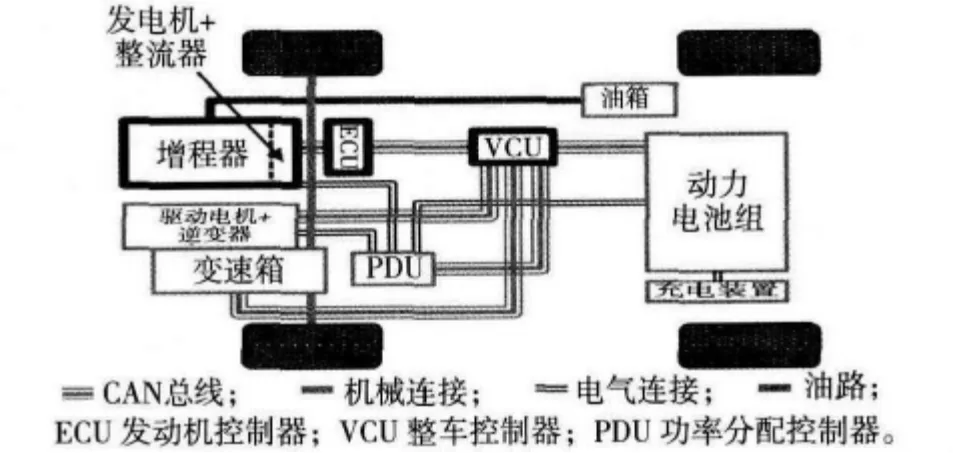
图1 增程式电动汽车动力系统结构Fig.1 Structure of the extended-range electric vehicle’s power system

图2 E-REV 运行模式Fig.2 Operational mode of the extended-range electric vehicle
1.2 传统E-REV 发动机控制策略
传统E-REV 发动机控制策略如图3 所示。恒温器控制原理:电池SOC 位于SOCmin和SOCmax之间时,发动机保持前一时刻的工作状态;SOC >SOCmax时,发动机关闭以纯电动行驶,动力电池满足整车所有功率需求;SOC <SOCmin时,发动机起动并工作于效率最高点,能量多余的部分给动力电池充电。这种控制策略下发动机在高效率点恒功率输出,能有效地避免发动机频繁起停和功率波动,但动力电池经常大电流充放电,对电池寿命极为不利[11]。
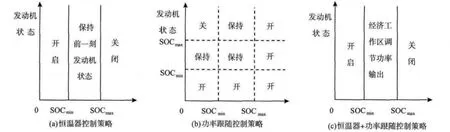
图3 传统E-REV 发动机控制策略Fig.3 Control strategy of the traditional extended-range electric vehicle’s engine
功率跟随控制原理:该策略根据整车的功率需求和电池SOC 的状态确定发动机的工作状态。只有当电池SOC >SOCmax且功率需求小于Pe_low时发动机才关闭,其他情况下发动机实时跟随负载需求功率。这种控制策略下电池能保持最佳的性能状态,但发动机波动频繁,对发动机的效率和油耗及NVH性能不利。
恒温器+ 功率跟随控制发动机工作状态与恒温器控制相似,不同的是发动机起动后在高效率工作段工作,并可在高效区域任意两工作点上自由切换,功率不足部分由动力电池提供。这种控制策略下虽然发动机不工作于最优工作点,但一直在效率较高的区域内工作,相对避免了转速过于频繁的变化,一定程度上弥补了各自单独控制的不足,整车效率、油耗和排放得到了优化。但功率跟随模式下发动机的不足并没有被完全消除。
图4 框中发动机工作点是依据恒温器+功率跟随控制策略选择的,可以看出该策略下发动机转速范围从1 300 r/min 至4 500 r/min,车辆正常行驶时由于没有严格的转速限值,发动机波动频繁;当需求功率过大且电池SOC 不足时也会引起发动机转速陡升,虽不会造成动力电池大电流充放电,但是对发动机效率、排放以及NVH 性能都极为不利。
2 多工作点控制策略设计
2.1 设计思路
结合E-REV 样车及增程器台架试验时出现的发动机起停频繁、高速行驶噪声明显以及电池经常大电流充放电等现象[7],设计发动机控制策略时着重考虑以下几个方面:
1)优化工作点:结合车辆行驶的最大需求功率、增程器效率及油耗、发动机转速,确定增程器的最佳工作点或最佳工作区间;基于车速、动力电池SOC 和整车控制器需求功率确定各工作点切换时刻。
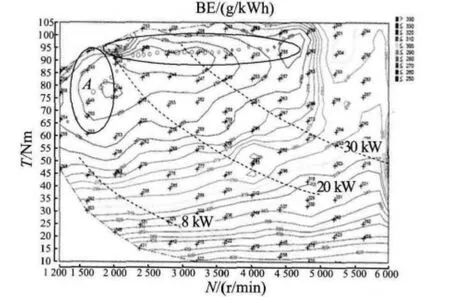
图4 发动机万有特性曲线Fig.4 Engine’s universal characteristics curve
2)动态波动最小化:减少发动机的起停次数,合理控制发动机转速,能量允许范围内尽可能延长纯电动行驶时间,使发动机的动态波动最小。
3)合理利用噪声掩蔽效应:参考车辆行驶时的路面噪声、空气噪声及发动机噪声水平,确定工作点切换的车速和发动机转速限值,利用这两种噪声的掩蔽效应降低高速行驶时的整车噪声,低速时掩蔽效果不理想则将发动机转速控制在合理范围内,不可过高。
4)限制最低转速:发动机低转速运行时普遍燃油效率非常低,因此当转速低于某一限值且电池电量能够满足车辆行驶需求时,可关闭发动机。
5)充电电流及速率控制:稳定增程器输出功率,从而控制动力电池充电电流及速率,提高电池效率及安全性,延长使用寿命。
2.2 工作点选择
2.2.1 选择依据浙江大学张彦廷以电池SOC现值作为切换依据提出了发动机双工作点控制策略[8],SOC 达到设定的上限值时发动机切换到高效区内功率较低的工作点;SOC 下降到设定的下限值时发动机切换到高效区内功率较高的工作点。双工作点控制与恒温器控制对发动机的控制方法基本相同,只是变为根据电池状况切换发动机的工作点。存在的问题是:若电池SOC 的范围选择较小,发动机需不断地在两工作点间切换,对系统稳定工作不利;若电池SOC 的范围选择较大,电池寿命和效率将受到影响。针对这个问题,结合所研究的整车及发动机性能参数、发动机万有特性曲线及车辆动力性能指标,文中提出发动机三工作点控制策略。
不同发动机具有不同的万有特性曲线,并且它们的高效区形状差异很大,一般情况下发动机工作点有以下3 种选取情况[9]:
1)发动机万有特性曲线上高效区的长轴为竖直方向时,可以选取图5 中a1和b1两点以及它们连线上的某个点作为发动机的工作点,从而使发动机尽可能工作于最高效率区,其中na1= nb1,Ta<Tb。由于3 个工作点的转速相同,所以控制方法可以选择定转速控制,只需设定3 个工作点的目标转矩即可。这种控制方式简单,并能减少许多控制量。
2)当发动机万有特性曲线上高效区的长轴为水平方向时,为了使发动机的工作点尽可能 处于最高效率区,可以选取图5 中a2和b2两点以及它们连线上的某个点作为发动机的工作点,其中na1<nb1,Ta= Tb。由于3 个工作点的转矩相同,所以发动机工作点的控制方法可以选择定转矩控制,只需设定目标转速即可。
3)为使发动机在高效区工作的可能性更高,可选取图5 中a3和b3两点以及它们连线上的某个点作为发动机的工作点。三工作点的位置根据高效区形状的不同而选择,一般情况下它们的连线与两条等功率线尽可能成垂直关系,其中na3≠nb3,并且Ta3≠Tb3。由于3 个工作点的转速和转矩不同,因此工作点控制方式和控制量相较前两种复杂。
2.2.2 工作点参数确定 所开发的E-REV 整车技术方案可参考图1。发动机万有特性曲线如图5 所示,整车基本性能参数如表1 所示,发动机性能指标如表2 所示,动力性能指标如表3 所示。

图5 发动机工作点的选取Fig.5 Selection of the engine’s operating point

表1 整车性能参数Tab.1 Vehicle performance parameters

表2 发动机参数Tab.2 Engine parameters
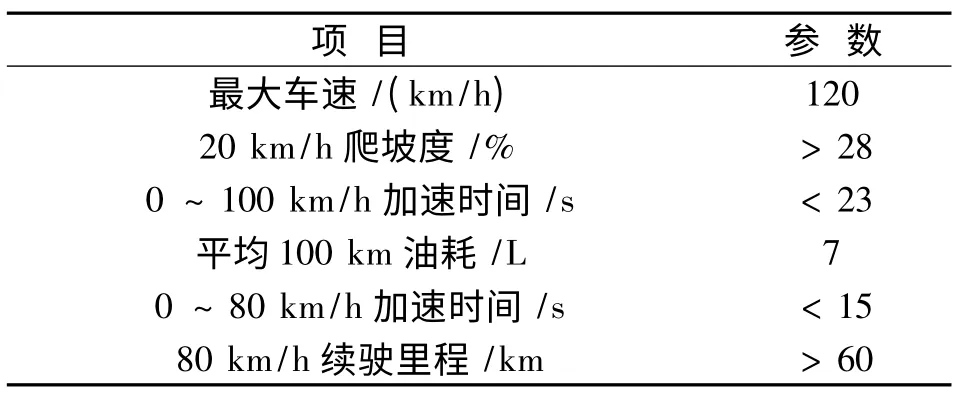
表3 动力性能指标Tab.3 Power performance parameters
由整车控制器需求功率确定发动机工作点输出功率,结合发动机万有特性曲线及发动机转速、转矩与输出功率的关系确定发动机工作点:
1)工作点输出功率确定:驱动电机峰值功率的选择要满足最高车速、最大爬坡度和加速性能的要求。根据最高车速选择电机的峰值功率[12-13]。最高车速下的驱动电机峰值功率:

加速所需驱动电机电机峰值功率:

最大爬坡度所需驱动电机峰值功率:

其中:f 为滚动阻力系数;m 为半载质量,取1 580 kg;ηT为传动系效率,取0.92;ηm为驱动电机效率,取0.87;CD为空气阻力系数;A 为迎风面积,m2;vmax为最高车速,km/h;v 为实时车速,km/h;vm为加速末速,km/h;tm为加速末时间,s;x 为拟合系数,取0.5;δ 为质量转换系数,取1.2;dt为设计迭代步长,取0.1 s;vc为爬坡车速,km/h;α 为最大坡度角,α =arctan(i)。

驱动电机峰值功率取53 kW,驱动电机可短时间过载运行,由下式可求得其额定功率:

式中λ 为驱动电机载倍数,通常取值1.6 ~2,求得驱动电机额定功率为26.4 ~33 kW,取28 kW。

增程器效率ηre= 0.86,由式(7)可得:满足车辆行驶要求的发动机最大功率为32.5 kW,考虑到行车充电模式下部分能量用于动力电池充电,发动机峰值功率设为35 kW,同样以此方式确定串联驱动模式及行车充电模式下的两个发动机工作点输出功率分别为10 kW,20 kW。
2)工作点转速、转矩确定:发动机功率与转速、转矩关系:

其中:Pe为发动机功率,kW;ne为发动机转速,r/min;Te为发动机转矩,N·m。
发动机转速与其振动噪声存在一定的非线性正相关[4,14],转速越高发动机振动噪声越剧烈,而转速过低时发动机效率又会受到影响[15]。因此确定发动机各工作点转速的思想是:高需求功率工作点在保证功率输出的前提下,结合发动机等值油耗线,在转矩输出正常值范围内尽可能降低发动机转速;低需求功率工作点,在满足功率输出的情况下为了保证效率,发动机转速不能过低,同时考虑燃油经济性因素。由发动机万有特性图可得发动机正常工作时扭矩输出最大值可达95 ~100 N·m,参考等值油耗线,确定三工作点转速、转矩值如表4 所示。图6为所选工作点在万有特性曲线图中的位置。
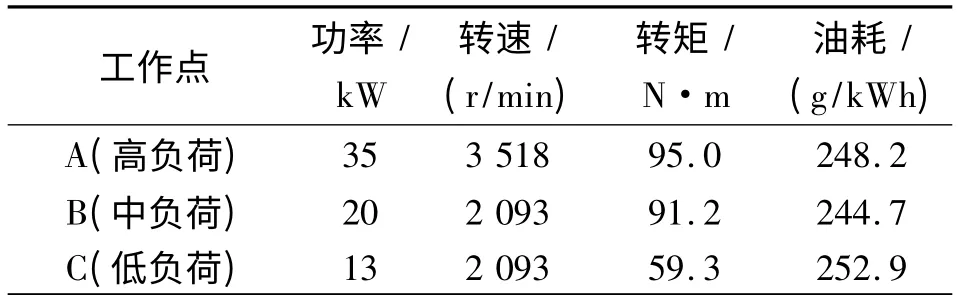
表4 发动机三工作点参数Tab.4 Parameters of the engine’s three operation points

图6 发动机三工作点选择Fig.6 Selection of the engine’s three operation points
2.3 控制策略规则
根据动力电池组性能参数、整车需求功率和增程器充电效果等先决条件,以电池充电放电深度均不宜过深及最低SOC 值必须保证为车辆加速提供足够的功率原则[16],结合厂家对电池耐久性及系统动力性实测数据多目标优化分析结果,确定关闭和起动增程器的SOC 上下限值分别为SOC_high =0.65 和SOC_low = 0.25,如图7 所示。
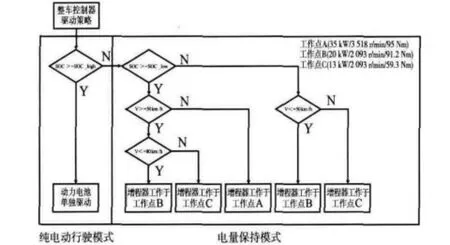
图7 发动机控制策略Fig.7 Engine’s control strategy
根据整车需求功率、发动机油耗和效率以及NVH 性能确定发动机三工作点,工作点间切换逻辑依据动力电池当前SOC 值以及车速当前值与切换限值设计,既能尽可能延长纯电动行驶里程、保证电池不过放,又能利用掩蔽效应降低整车噪声水平,提高舒适性。三工作点控制策略规则如下:
1)根据整车功率需求、发动机油耗和效率在万有特性曲线中寻找低、中、高负荷的3 个工作点,输出功率分别为PL,PM,PH,这3 个点均为相应功率下的燃油经济性、效率和NVH 性能综合最优点。
2)设定车速切换上下限值为VH,VL,二者的值分别为80 km/h 和50 km/h。
3)纯电动行驶模式下,动力电池提供车辆行驶所有的功率需求。
4)串联驱动模式及行车充电模式下,采用增程器为主、动力电池为辅的控制模式。第1 种情况当电池能输出的功率足够且SOC 值大于设定的下限值时,车速大于VH时发动机工作于高负荷的C 点;车速介于VL~VH时发动机工作在中负荷的B 点;车速小于VL时,发动机工作于低负荷的A 点。第2 种情况当电池能输出的功率不足且SOC 值小于设定的下限时,判断车速是否大于VH,当满足条件时工作在C 点,否则工作在B 点。
第1,2 步中设定的多工作点工作模式以及车速切换限值,降低了某些车速波动较大工况下发动机工作点的切换频率;第3 步保证了纯电动行驶模式下的纯动力电池工作状态;通过第4 步的工作点切换策略,在优化发动机燃油经济性的基础上也使得动力电池SOC 稳定在一定的区间内,有利于提高动力电池的效率和使用寿命。
3 控制策略仿真分析
基于Matlab/Simulink 软件完成多工作点控制策略的模型搭建,AVL-Cruise 软件搭建整车仿真模型,二者联合完成离线仿真验证。在Cruise 软件中依次选择整车模块、发动机模块、电池模块、电机模块以及Matlab 接口的Matlab DLL 模块等,从界面中输入配置参数,建立机械连接,完成的整车模型如图8所示。图中方框内表示的是Cruise 中的数据连接,相当于整车的CAN 通信,模型中Matlab DLL 模块与整车模块的数据连接模拟控制器与整车的直接通信,是建模仿真的关键。Simulink 中发动机开关模型如图9 所示,发动机工作状态控制模型如图10 所示。

图8 E-REV 整车模型Fig.8 Full vehicle model of the extended-range electric vehicle
分别以NEDC、FTP72 工况为例对控制策略模型进行仿真试验分析,工况速度、加速度、减速度以及行驶距离的时间历程曲线如图9 所示;驱动电机跟随驾驶员需求输出的功率、转速及转矩曲线如图10 所示。可以看出,仿真试验中实际车速完全符合工况车速的要求,控制模型可以很好地将驾驶员意图转化为车辆控制信号。
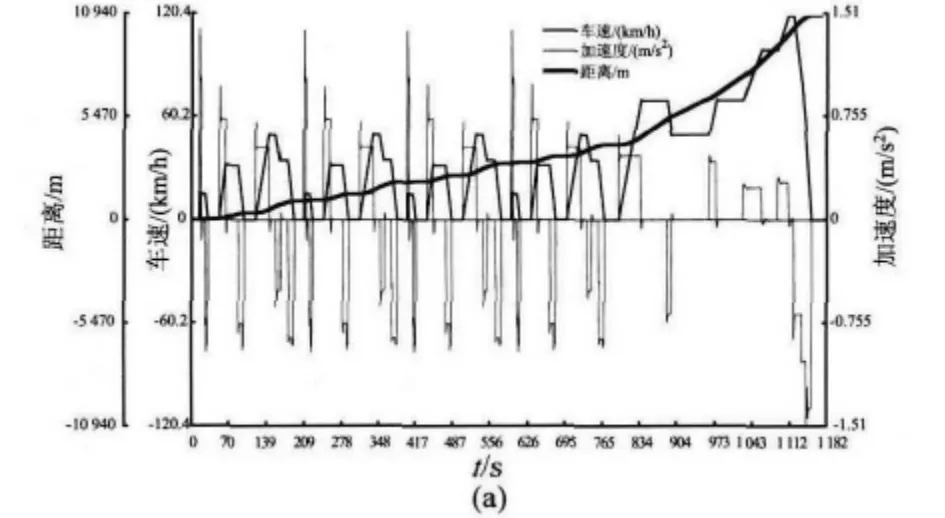

图10 驱动电机功率、转速、转矩曲线Fig.10 Curves of the drive motor’s power,rotate speed and torque
图11 是两种工况下发动机功率、转速及转矩曲线,可以看出发动机能很好地控制在目标工作点上运行,输出功率能够达到计算的需求功率,系统对变换工作点的控制指令响应速度快,动态波动小;转速基本恒定地维持在3 个目标转速,峰值转速维持在3 530 转以下,发动机噪声基本能够被高速行驶时的路面噪声和空气噪声所遮蔽。图12 是两种工况下动力电池SOC 的变化曲线。试验过程中电池SOC 值始终在0.65 至0.25 之间变化,并且上升阶段斜率基本固定,证明发动机恒定功率输出方式稳定了电池充电速率,达到控制策略的预期效果。表5列出NEDC、FTP72 两种工况下油耗及排放的仿真结果,结果显示车辆经济性、排放性能够满足设计指标及国家相关指标要求,证明多工作点控制策略的可行性和正确性。

图11 发动机功率、转速、转矩曲线Fig.11 Curves of the engine’s power,rotate speed and torque

图12 动力电池SOC 变化曲线Fig.12 Curves of the power battery’s state of charge
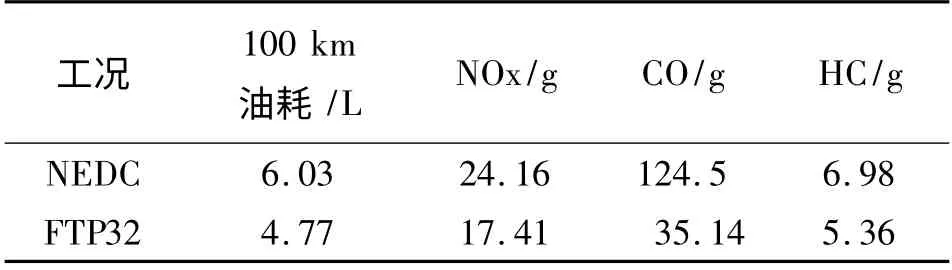
表5 发动机油耗及排放仿真试验结果Tab.5 Results of the engine’s fuel-consumption and exhaust performance simulation test
4 结 语
在分析E-REV 发动机传统控制策略的基础上,结合增程器台架及E-REV 整车试验出现的问题,提出发动机多工作点控制思想。针对E-REV 增程器设计具体实例,采用发动机三工作点控制策略,运用Matlab/Simulink 软件完成控制策略模型搭建,AVL-Cruise 软件完成整车及工况模型搭建并联合完成离线仿真试验,验证了控制策略的可行性和正确性。试验中发动机能很好地控制在目标工作点上运行,对变换工作点的控制指令响应速度快,动态波动小;转速基本恒定地维持在3 个目标转速,峰值转速保持在3 530 r/min 以下,发动机噪声基本被高速行驶时的路面噪声和空气噪声遮蔽;两种工况试验过程中电池SOC 值始终在0.65 至0.25 之间变化,并且SOC 上升阶段斜率基本固定,充电速率稳定,达到了控制策略的预期效果。
文中提出的发动机多工作点控制策略,在以下几方面可以继续深入研究:
1)工作点的选择可基于发动机输出功率、效率、油耗、排放性、车速等多个约束条件,利用现代智能优化算法进行多目标优化,精确选定工作点。
2)策略中工作点间的切换指令是瞬态阶跃信号,会引起发动机转速、转矩的突变,未来可对工作点切换过程进行详细研究,采取其他线性或非线性控制信号调节转速变化过程。
3)建立路面噪声、空气噪声与车速的准确对应关系,精确控制发动机峰值转速,最大限度利用这两种噪声的掩蔽效果降低高速行驶时的整车噪声。
4)继续进行增程器台架试验及整车道路试验,验证控制策略的实际效果,有条件的实验室还可利用消声室或半消声室进行整车NVH 试验,评价控制策略对车辆噪声的影响。
[1]麻友良,陈全世.混合动力电动汽车的结构与特性分析[J].汽车研究与开发,2000(4):20-22.
MA Youliang,CHEN Quanshi.Analysis of the hybrid electric vehicle’s structure and characteristic[J].Automobile Research and Development,2000(4):20-22.(in Chinese)
[2]黄香儿.增程式电动汽车辅助动力单元控制系统的研究[D].上海:上海工程技术大学,2012.
[3]张志华,周松,黎苏.内燃机排放与噪声控制[M].哈尔滨:哈尔滨工程大学出版社,2003.
[4]庞剑,湛刚.汽车噪声与振动—理论与应用[M].北京:国防工业出版社,2006.
[5]人一.电动汽车增程器的声学开发[J].汽车与配件,2012(50):32-35.REN Yi.Acoustic development of the electric vehicle’s extender[J]. Automobile and Parts Technology,2012(50):32-35. (in Chinese)
[6]Rosenkranz K.Deep cycle batteries for plug-in hybrid application[C]//EVS-20 Plug-in Hybrid Workshop.Long Beach,CA:[s.n.],2003:11.
[7]周苏,牛继高,陈凤祥,等.增程式电动汽车动力系统设计与仿真研究[J].汽车工程,2011,33(11):924-929.
ZHOU Su,NIU Jigao,CHEN Fengxiang,et al. A study on powertrain design and simulation for range-extended electric vehicle[J].Automobile Engineering,2011,33(11):924-929.(in Chinese)
[8]Patrick M Walsh,King J,Gantt L,et al.An extended-range electric vehicle control strategy for reducing petroleum energy use and well-to-wheel greenhouse gas emissions[C]//SAE 2011 World Congress and Exhibition.Detriot MI,USA:[s.n.],2011.
[9]叶冬金.增程式纯电动车动力系统参数匹配及控制策略研究[D].长春:吉林大学,2012.
[10]James Turner,Darren Blake,Jason Moore,et al.The lotus range extender engine[J].SAE Int J Engines,2010,3(2):318-351.
[11]Ahmad Pesaran. Battery requirements for plug-in hybrid electric vehicles-analysis and rationale[C]//EVS23-The 23rd World Electric Vehicle Session.Anaheim,California:[s.n.],2007:11.
[12]陈长红.增程式电动汽车控制策略的研究[D].锦州:辽宁工业大学,2013.
[13]张彦廷.基于混合动力与能量回收的液压挖掘机节能研究[D].杭州:浙江大学,2006.
[14]朱仙鼎.中国内燃机工程师手册[M].上海:上海科学技术出版社,2000.
[15]喻厚宇,黄妙华,邓楚南.并联HEV 发动机最优工作线和高效工作区的确定[J].上海汽车,2007(7):3-6.
YU Houyu,HUANG Miaohua,DENG Chunan. A study on parallel HEV engine’s optimal working line and efficient workspace[J].Shanghai Automobile,2007(7):3-6.(in Chinese)
[16]Hans Kemper,Thomas Hülshorst,Axel Schlosser,et al. E-vehicles with range extender-properties and potentials[J]. Aachener Kolloquium Fahrzeug-Und Motorentechnik,2009,1:1001-1024.
猜你喜欢
汽车实用技术(2022年4期)2022-03-07 03:47:32
汽车实用技术(2020年2期)2020-02-25 03:19:53
汽车维护与修理(2018年1期)2018-04-04 01:13:22
能源(2017年12期)2018-01-31 01:43:00
汽车文摘(2017年5期)2017-12-05 16:34:04
汽车文摘(2017年10期)2017-12-02 01:10:31
资源再生(2017年4期)2017-06-15 20:28:30
电源技术(2016年9期)2016-02-27 09:05:45
电源技术(2016年2期)2016-02-27 09:04:43
汽车维护与修理(2015年5期)2015-02-28 12:16:34