水声测量用反光膜片运动机构的设计与仿真
2015-01-09 09:16:25朱学文陈毅黄勇军
声学与电子工程 2015年4期
朱学文 陈毅 黄勇军
(第七一五研究所,杭州,310023)
水声测量用反光膜片运动机构的设计与仿真
朱学文 陈毅 黄勇军
(第七一五研究所,杭州,310023)
设计了一套水声测量用反光膜片运动机构,并在Solidworks软件的运动仿真模块COSMOSMotion中进行运动学仿真,仿真数据与理论设计数据相符,验证了反光膜片运动机构理论设计的正确性以及加工的可行性。
水声测量;反光膜片;运动机构;仿真
随着科学技术的进步和武器装备技术的发展,超声和水声设备的工作频率越来越高,同时对测量装置的要求也越来越高。反光膜片运动机构是高频换能器用激光法测量时的一个重要辅助调节运动机构。反光膜片使用时需将入射激光反射回去,所以需精确调节入射激光与反光膜片之间的位置与角度,而角度的调节包括水平角度与俯仰角度的调节。本文就是根据反光膜片角度调节的需要,设计了一个反光膜片运动机构。将机构设计并虚拟装配完成后,再进行该机构的运动学仿真,以验证机构的理论运动参数与仿真运动参数的一致性。若二者一致,则说明理论设计是成功的,反之,则需要重新设计。
1 机构的设计与三维建模
Solidworks是基于Windows平台的三维机械设计软件,在国内已得到广泛使用。该软件具有全面的实体建模功能,可快速生成完整的工程图。本文以Solidworks为设计平台进行反光膜片运动机构的三维建模与虚拟装配,之后再利用其运动仿真模块COSMOSMotion进行运动参数的仿真。经过多次设计、修改,最后装配完成的反光膜片运动机构如图1所示。
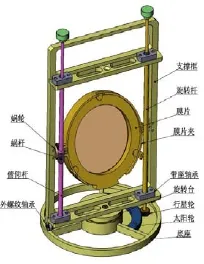
图1 反光膜片运动机构总装配图
该机构主要由支撑框、旋转杆、膜片、膜片夹、带座轴承、旋转台、行星轮、太阳轮、底座、蜗轮、蜗杆、俯仰杆、外螺纹轴承等零部件组成,其中行星轮与太阳轮构成行星轮系。
2 仿真模块COSMOSMotion中仿真
2.1 添加约束关系
在SolidWorks中打开反光膜片运动机构装配体,在其运动仿真模块COSMOSMotion中指定运动零部件与静止零部件,去除多余的COSMOSMotion自动生成的约束关系并添加其他一些必要的约束关系,其中主要是旋转约束。
2.2 添加机构的动力源
主要是旋转调节与俯仰调节所需动力,即旋转扭矩,在COSMOSMotion中表现为旋转调节与俯仰调节的角速度。本文设置两个角速度大小均为20 deg/sec。具体设置见图2[1,2]。

图2 旋转副运动属性设置
2.3 添加3D碰撞
设置相互碰撞的两对零件,即行星轮系的扇齿轮、直齿轮,组成旋转调节机构;蜗轮、蜗杆组成俯仰调节机构。具体定义见图3。
2.4 设置仿真参数
设置仿真时间6 s,仿真帧数为100。其他参数为默认设置。
2.5 仿真分析
仿真完成后,绘制仿真曲线。包括支撑框与底座旋转副的角速度和工程角曲线,即Revolute的角速度(图4)与工程角曲线(图5);蜗轮绕自身Z轴旋转的角速度与工程角曲线,即Revolute2的角速度(图6)与工程角曲线(图7)。

图3 3D碰撞定义

图4 支撑框的角速度

图5 支撑框的工程角(z轴)

图6 蜗轮角速度
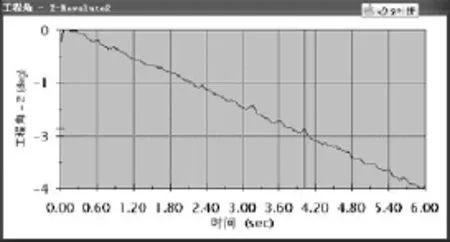
图7 蜗轮的工程角(z轴)
2.5.1 支撑框角速度与工程角分析
在本例中,行星轮系的结构演示如图8所示。图中所示F=1+C/B,其中F为行星架转动一周行星轮所转动的角度,C为太阳轮的齿数,B为行星轮的齿数。
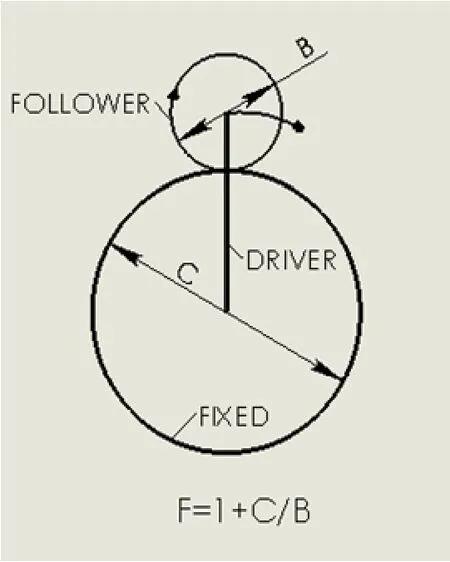
图8 行星轮系演示图
在反光膜片运动机构中,支撑框的角速度即为DRIVER的角速度,C为太阳轮,即本例中的扇齿轮,B为行星轮,即本例中的直齿轮。现在已知B,即直齿轮的角速度,求DRIVER的角速度,所以可列出方程式:

其中,C为扇齿轮的齿数,B为直齿轮的齿数,x为支撑框的角速度,20为直齿轮的角速度,已知C=260,B=30,所以x=2.3 deg/sec。
对比图4可以看出,支撑框的角速度大小也在2.3上下波动,在EXCEL中输出0~6 s内支撑框的角速度,并计算其平均值约为2.2 deg/sec,在误差范围内仿真结果与理论计算吻合,数值上下波动为齿轮之间相互碰撞的结果。
从图5可以看出,支撑框在6 s内转过角度为14°左右,而2.3 deg/sec×6 sec=13.8 deg,仿真结果与理论计算相当吻合。
2.5.2 蜗轮蜗杆角速度与工程角分析
蜗杆传动的传动比:蜗杆传动的传动比是主动的蜗杆角速度与从动的蜗轮角速度的比值,传动比等于蜗杆头数与蜗轮齿数的反比。即:
式中:n1、n2为蜗杆蜗轮的转速;z1、z2是蜗杆头数、 蜗轮齿数。需要指出的是, 蜗杆传动的传动比不等于蜗轮、 蜗杆分度圆直径之比。
本例中,蜗杆头数为1,蜗轮齿数为20,所以:

蜗杆角速度为20 deg/sec,蜗轮角速度为1 deg/sec,从图6可以看出,蜗轮角速度在1 deg/sec上下波动,这是蜗轮蜗杆碰撞的结果。从图7可以看出,蜗轮在6 s内的工程角并不等于6deg(1 deg/sec×6 sec),笔者分析应该为蜗轮蜗杆之间存在缝隙,并且仿真时间太短的原因。
3 结论
经过在SolidWorks中建模并进行运动仿真,可以看出仿真结果与理论设计基本吻合。验证了反光膜片运动机构理论设计的正确性以及加工的可行性,说明反光膜片运动机构完全可以满足使用要求。从整个设计流程来看,仿真正逐步成为设计生产不可或缺的过程,不但减少设计错误,也可提高设计效率,降低生产成本。
[1]张晋西,郭学琴.SolidWorks 及COSMOS Motion机械仿真设计[M].北京:清华大学出版社,2007.
[2]SolidWorks公司.SolidWorks 2007 在线使用指南[Z].2007.
[3]SolidWorks公司.SolidWorks API二次开发[M].北京:机械工业出版社,2005.
猜你喜欢
中国果业信息(2022年9期)2022-11-19 13:46:21
舰船科学技术(2021年5期)2021-07-03 07:26:04
机械设计与制造工程(2021年3期)2021-04-16 14:48:46
小学生学习指导(高年级)(2021年3期)2021-04-06 08:49:42
中国特种设备安全(2019年8期)2019-10-14 00:32:34
烟台果树(2019年1期)2019-01-28 09:34:48
果树实用技术与信息(2016年12期)2017-01-07 01:40:44
邵阳学院学报(自然科学版)(2015年2期)2015-06-05 12:22:39
交通建设与管理(2015年13期)2015-03-20 15:18:48
机械工程师(2015年10期)2015-02-02 01:13:42