基于航模辅助的智能交通观测技术
2015-01-09 03:39张煜恒袁小翔
城市道桥与防洪 2015年7期
张煜恒,袁小翔
(东南大学,江苏南京 210096)
1 研究背景
随着交通量的增加、路幅的增宽、车道的拓展,传统的交通调查手段已经难以满足现代交通对于大数据,应对紧急情况的需求。而另一方面,智能交通系统正在蓬勃的发展。
智能交通系统[1]将先进的信息技术、数据通讯传输技术、电子传感技术、电子控制技术以及计算机处理技术等有效地集成运用于整个交通运输管理体系,而建立起的一种在大范围内、全方位发挥作用的,实时、准确、高效的综合运输和管理系统。其中,先进的交通观测技术和数据采集技术是智能交通技术的重要组成部分。作为智能交通系统重要的一环,交通信息采集系统正不断改善着交通调查的速度和效率。
但是,如今大多数的智能检测设备被局限在路面上,有着设备成本高、数据获取难度大、获得的数据精确度不足等缺点。而数据采集过程,为了保证数据的准确性,大多采取了人工采集的方法,耗费大量人力,这与时代要求的智能化相去甚远。
为了解决上述问题,我们提出并实践了“基于航模”的交通信息采集方法,并自主研发配套软件进行数据处理。
2 系统简介
我们分硬件系统与软件系统同时进行开发。硬件系统上主要是通过集成航模飞控等技术设备构建航模交通观测系统,使其具备航空交通观测能力。软件系统上,基于MFC以及OpenCV平台[2]开发交通目标坐标与轨迹提取软件,用于提取图片中车辆的道路坐标、速度、加速度、交通量等数据[3]。并将软硬件进行协调设计。
2.1 硬件系统
我们搭建了以四轴固定翼航模为基础的视频采集平台,可实现交通流视频采集的功能,为我们的软件提供一个俯拍视角的视频素材。航模观测系统分为机载系统及地面站系统两部分。机载系统包括四轴飞行器航模搭载摄像机、飞控模块、接收机、数传模块及图传模块;地面站包括电脑、显示器、遥控器、数传模块及图传模块,见图1。

图1 硬件系统示意图
2.2 软件系统
下面将简单阐述软件所具备的的功能与简单原理。
(1)视频的矫正(预处理)
航模拍摄的视频大多受风向以及操作的影响存在着不同程度的抖动,而视频的稳定化处理是又是视频高效精确处理的前提,所以必须对航模拍摄的视频进行预处理[4]。
软件首先对视频中角点进行识别,由用户选择相对于大地静止的角点(所谓角点,即特征点,是图像中具有某种特征而易于识别出的点,静止的角点我们通常选取道路两旁的建筑物)进行跟踪。
本算法使用灰度梯度的方法识别角点:对灰度图像值进行二维求导,灰度梯度的极值点,即是角点。尔后,通过对视频中的静止的角点逐帧识别并跟踪,以这些角点为基准坐标对视频的坐标进行重新的标定,从而得到稳定化的,处理精确度高的视频片段。
(2)车辆的自动识别
软件可以完成自动识别出车辆的功能。识别方面软件使用高斯混合背景差法,即将稳定化处理后的视频中的车辆(前景)从道路(背景)中分割出来。软件运行时,通过前几秒的背景积累后,便可将移动的交通流从背景中分割出来。将得到运动的前景图像进行腐蚀与膨胀处理,过滤掉环境噪声后,便得到只含运动前景(车辆)的二值图。
(3)车辆轨迹的跟踪
识别出运动车辆后,软件可以对其轨迹进行跟踪。车辆的跟踪采用L-K算法[5],通过对于前景图像的角点(车辆与道路的边界灰度变化率很大,通常为梯度极值而被识别为角点)进行识别与连续跟踪,从而得到车辆前景图像坐标信息与运动轨迹。再通过坐标与时间的相对关系,算出每个车辆的速度,加速度等基础数据。
3 实践
基于上述各种功能的实现,我们提出了一种基于航模的交叉口交通量的统计方法,并进行了实际验证。
3.1 方法简介
由于航拍视频是俯拍,是三维场景在二维平面下的真实还原(略去了在交通量调查中不必考虑的地形因素),所以视频中所获取的交叉口交通量的信息即为真实交通量。
最常见的十字交叉口,我们将其四个分支进行编号,分别为 I,II,III,IV,见图2。

图2 平面交叉口交通流
当车辆进入图1矩形区域时,软件对车辆进行角点识别并跟踪其轨迹信息,视频处理结束后,将轨迹信息进行处理
软件采用角点跟踪记录轨迹、前景分割面积作为权重的一种新型交通流统计算法。通过轨迹落入图中矩形局域的先后顺序,从而获得车辆的转向信息。正常情况下,软件能将运动的车辆完整分割(见图3(a)),但在特殊的光线下中,由于车辆的挡风玻璃的光线反射,或车辆的局部区域与路面颜色相近时,前景分割会出现将一辆车处理为两辆车的情况(见图3(b))。所以软件将前景识别面积作为轨迹的权重,对标准车辆大小进行对比,再进行换算,从而获得车辆的转向信息以及准确的分车型的交叉口交通量数据。

图3 混合高斯背景差法
3.2 实例
以南京市江宁区苏源大道与吉印大道的交叉口进行软件测试。
其中,东西向的是吉印大道,南北向的是苏源大道,该交叉口地处南京市江宁区,是苏源大道和吉印大道的交叉口,位于东南大学九龙湖校区外的西北角。苏源大道和吉印大道都是按照公路设计标准设计的,越来越多地承担城市道路功能的道路,设计时速80 km/h,全线限速70 km/h,均为双向四车道道路,有较为宽阔的中央分隔带。由于道路的原因,该交叉口区域很大,视域很好,交叉口前有四个车道,分别是非机动车道、直右车道、直行车道、左转车道,见图4。

表1 人工统计交通量汇总
我们选择了秋季某日的晚高峰时期进行了一次调查,从17:15与17:45开始,进行了两次10 min的交通量统计。
人工统计交通量见表1。
拍摄视频经软件处理后的交通量数据见表2。

表1 人工统计交通量汇总
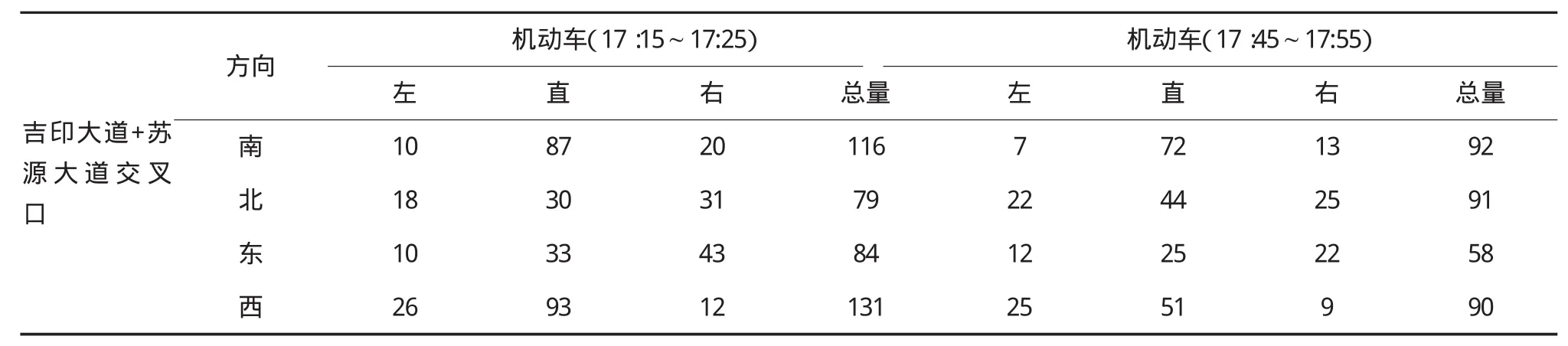
表2 拍摄视频经软件处理后的交通量汇总
3.3 误差分析
我们可以认为人工统计的结果是准确的。
则以人工计数为准,误差分析见表3。
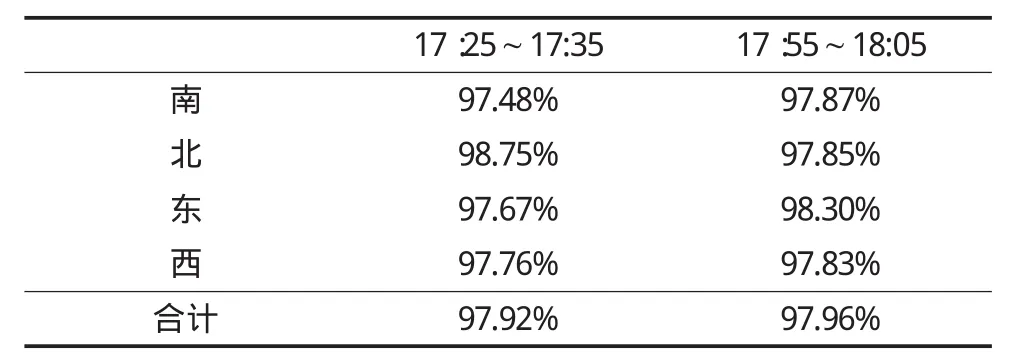
表3 误差分析表
对于本软件的误差,经分析可能有以下原因:
(1)由于算法是根据灰度判别的,和道路颜色相近的某种灰色车辆在视频中不易被识别,而发生漏记;
(2)拍摄视频时间与人工统计时间有所出入,可能不是同时开始及结束,导致变量不单一;
(3)非机动车在机动车道行驶时,若目标较大也可能被统计在内,导致误差形成。
从以上实验数据可以看出,经软件处理而得到交通量与人工统计法的结果相比,准确率达到97.94%,误差率为2.06%,十分可观。根据我们目前的研究状况,这一方法操作方便,且本软件中对于平交口交通量调查的数据较为准确,可以进行后续数据处理,并初步代替人工观察。
4 结语
交通智能化是未来的必然趋势,在这样的环境下,我们应当多多尝试去开辟一些新的思路,以智能化的观点来解决我们的交通问题。我们所研究的航模辅助智能交通系统,操作简单方便,经实践证明也具有一定的精确度。该系统将通知识与计算机技术相融合,很好的体现了智能交通的思想,解放了人力物力,精确度也较高。
[1]贾小军,喻擎苍.基于开源计算机视觉库OpenCV的图像处理[J].计算机应用与软件,2008,25(4):276-278.
[2]刘慧英,王小波.基于OpenCV的车辆轮廓检测[J].科学技术与工程,2010(12):2987-2991.
[3]张宏志,张金换,岳卉,等.基于 CamShift的目标跟踪算法[J].计算机工程与设计,2006,27(11):2012-2014.
[4]刘进才,张王月,池秀静.数字图像处理技术在交通调查与分析中的应用研究[J].内蒙古科技与经济,2005(16):66-67.
[5]明冬萍,骆剑承,沈占锋,等.高分辨率遥感影像信息提取与目标识别技术研究[J].测绘科学,2005,30(3):18-20.
猜你喜欢
计算机应用与软件(2022年12期)2023-01-31
中国交通信息化(2022年4期)2022-06-17
计算机仿真(2021年8期)2021-11-17
中国交通信息化(2018年6期)2018-08-29
电子技术与软件工程(2018年10期)2018-07-16
儿童故事画报·自然探秘(2017年3期)2017-06-29
中国交通信息化(2017年5期)2017-06-06
北方交通(2016年12期)2017-01-15
语文世界(小学版)(2014年3期)2014-08-02
自然资源遥感(2012年4期)2012-12-27