一种基于模糊PID的3TPS/TP型并联机器人的控制算法
2015-01-07 06:38李孟歆
集成技术 2015年2期
李孟歆 李 冲
(沈阳建筑大学信息与控制工程学院 沈阳 110168)
一种基于模糊PID的3TPS/TP型并联机器人的控制算法
李孟歆 李 冲
(沈阳建筑大学信息与控制工程学院 沈阳 110168)
3TPS/TP型并联机器人本身所具有的强耦合性、非线性和多变量等特点导致其无法建立精确的数学模型,进而使得传统的比例积分微分(Proportion Integration Differentiation,PID)控制算法难以得到较好的应用。文章将模糊控制算法和传统的PID控制算法相结合,得到模糊PID控制算法并应用于3TPS/TP型并联机器人控制系统的伺服电机中。仿真结果表明,模糊PID控制算法在控制精度、稳定性以及适应性方面都优于PID算法,控制效果符合预期要求。
模糊PID控制;3TPS/TP型并联机器人;伺服电机
1 引 言
并联机器人机构本身所具有的刚度大、承受能力强以及结构紧凑等特点使其应用范围日益广泛[1],而其在石材加工行业的应用更是目前的研究热点之一。通常来说,对并联机器人的研究多集中于研究并联机器人末端是否能够按照期望轨迹运动,已有大量学者在并联机器人控制方法的研究上成果颇丰。如赵少林等[2]将模糊比例积分微分(Proportion Integration Differentiation,PID)控制算法应用到煤炭分拣机器人中,提高了分拣机器人控制系统的抗干扰能力;王磊等[3]将神经网络滑模控制算法应用到并联机器人中,能够解决机器人中的轨迹跟踪控制问题。学者多将上述控制方法分为两大类,即以PID控制算法为主的传统算法和以鲁棒控制法、模糊控制算法等为代表的先进算法。与先进的控制算法相比,传统算法以其自身控制思路清晰、算法简单、可靠性强等优势仍然在工业过程控制中保有广泛的应用:李尹[4]将传统PID控制算法应用于风速控制系统的开发,并针对应用中遇到的需要反复整定控制参数;韩大平[5]将传统PID控制算法应用到回转窑的温度控制中,以提高回转窑的烘焙质量。但在石材加工行业并联机器人算法研究方面仍有较大提高的空间。如用于石材加工行业的3TPS/TP型并联机器人,具有5个自由度的强耦合、多变量、非线性的系统,而其非线性的特点导致无法建立精确的数学模型来实现控制,进而导致单独应用对数学模型要求精确的传统PID控制算法无法取得良好的应用效果,系统的鲁棒性和反应速度都难以达到预期要求。作为一种先进的控制算法,模糊控制算法可以较好地弥补上述缺陷。模糊控制算法是对人脑的一种模拟,其控制过程并不依赖于针对被控制对象所建立的精确数学模型,尤其在难以建立精确数学模型、非线性的控制过程中极具优势,获取较好的控制效果,系统的鲁棒性和反应速度都得到了一定程度的提高。然而,单独运用模糊控制算法存在一定的稳态误差,稳态精度较低。故本文将传统的PID控制算法和模糊控制算法相结合构成模糊PID控制算法应用于3TPS/TP型并联机器人控制系统的伺服电机上,以实现机器人工作头刀尖点的位置调节。模糊PID控制算法综合上述两种方法各自的优势,弥补各自的缺陷,使得控制器兼具模糊控制灵活且适应性强和传统PID控制精度高的双重特点。
2 3TPS/TP型并联机器人的控制系统
3TPS/TP型并联机器人是用于石材加工行业的一种新型机器人,共具有5个自由度,包括2个串联自由度和3个并联自由度。其中,串联部分可以实现沿x轴、y轴方向的移动,并联部分可以实现绕x轴、y轴的转动以及沿z轴方向的移动。正是3TPS/TP型并联机器人在结构形式方面的上述特点使其能够满足石材加工行业精确、快速等要求。相应地,上述特点也对控制系统提出了较高的要求。3TPS/TP型并联机器人的控制系统主要由驱动器、伺服电机、执行机构和位置反馈四个部分组成,具体结构如图1所示。其中,控制系统中的伺服电机采用日本安川伺服电机,型号为SGMJV-04ADE6E;执行机构为3TPS/TP型并联机器人工作头的刀尖点;位置反馈的目的是为了保证系统的稳态性能和动态跟踪性能。外界输入到控制系统的控制信号通过驱动器传给伺服电机,伺服电机将控制信号传到工作头的刀尖点,这样刀尖点就按照预期的控制要求进行工作,得到的结果通过位置传感器返回给信号发生器,并将实际结果与预期结果进行比较以判断控制效果是否满足预期要求。
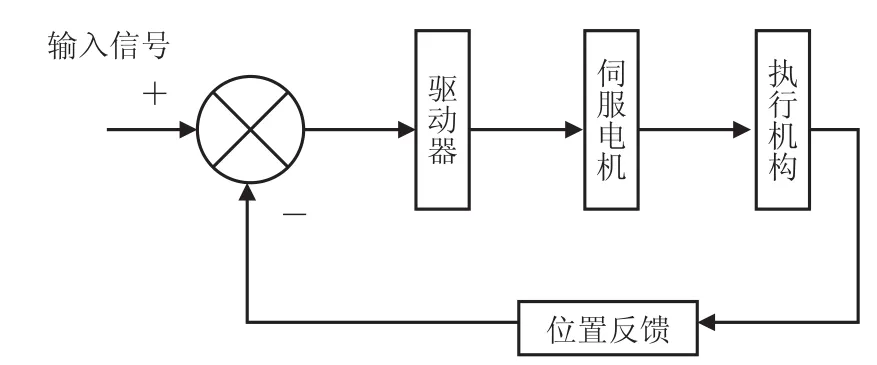
图1 3TPS/TP型并联机器人的控制系统结构图Fig.1 Control system structure diagram of 3TPS/TP parallel robot
3 模糊 PID 控制器设计
目前,传统的PID控制算法在诸多领域内得到应用,其控制效果精确、稳定的特性成为其最大的优势,但该类算法需要以针对被控制对象所建立的精确数学模型为基础,因而不适用于非线性系统控制。而模糊控制算法是以模糊集合理论、模糊语言变量及模糊逻辑推理等为基础的现代智能控制技术。对于非线性系统而言,模糊控制算法可在不建立精确数学模型的情况下完成控制并取得良好的控制效果,但由于其实现过程无积分环节,容易产生振荡现象和稳态误差,进而影响控制的效果。我们注意到,石材加工行业采用的3TPS/TP型并联机器人控制系统属于非线性控制系统,同时对控制效果的精确性和稳定性持有极高的要求。鉴于这一现实需求,本文结合3TPS/TP型并联机器人控制系统的实际运行条件,尝试采用模糊PID控制算法来实现上述控制,使该控制系统兼顾模糊控制算法和PID控制算法各自的设计要点,最终满足石材加工行业的需求。
模糊PID控制器的基本原理是将模糊控制环节加在传统PID控制器上,以系统的实时状态为基础,实现对PID三个参数KP、KI和KD的在线调节。具体来说,该控制器设计的主要目标在于找出PID三个参数KP、KI和KD与系统偏差E以及偏差变化率EC之间的模糊关系,然后在系统运行中不断检测E和EC,并根据模糊控制原理对上述三个参数进行在线修改,以满足不同阶段的E和EC对控制参数的不同要求,使被控对象具有良好的动态和静态特性。
将上述模糊PID控制原理运用于3TPS/TP型并联机器人控制系统的设计,得到模糊PID控制器(见图2)。此二维控制器以偏差e和偏差变化率ec的模糊量E、EC作为输入量,PID控制器的三个参数的模糊量作为输出,用以整定PID控制器的参数KP、KI和KD。整个控制系统包括模糊控制器和PID控制器两个部分。其中,模糊控制器由模糊化、模糊推理以及模糊决策三个部分组成。模糊控制器需要选择适当的关系生成方法和推理合成方法。具体步骤如下:

图2 3TPS/TP型并联机器人的模糊PID控制系统图Fig.2 Fuzzy PID control system diagram of 3TPS/TPparallel robot
(1)确定隶属度函数
模糊控制中常用的隶属度函数包括以下几种:三角形、梯形、简单sigmoid、高斯型、钟形、S形等。本文采用灵敏度高且在论域范围内均匀分布、等距离的三角形函数[6]。
设定系统偏差E,偏差变化率EC的模糊子集为{NB(负大),NM(负中),NS(负小), ZO(零),PS(正小),PM(正中),PB(正大)}。同理设定输出量的模糊子集也为{NB(负大),NM(负中),NS(负小), ZO(零),PS(正小),PM(正中),PB(正大)}。输入和输出的模糊论域均取[-3,3]。图3和图4分别为E、EC的隶属度函数,其他变量的隶属度函数与它们相同。
(2)建立模糊控制规则表
建立模糊控制规则的基本原则[7]如下:①当误差E较大时,需加大对误差E的控制作用,以快速消除误差,提高系统响应速度;②当误差E较小时,需加大对误差变化率EC的控制作用,以避免超调使系统快速进入稳态。PID参数的整定必须考虑不同时刻三个参数的作用及相互之间的互联关系。本文通过反复实验调整及结合相关资料查询,得到分别针对三个参数整定的模糊控制表,如表1、表2和表3所示。
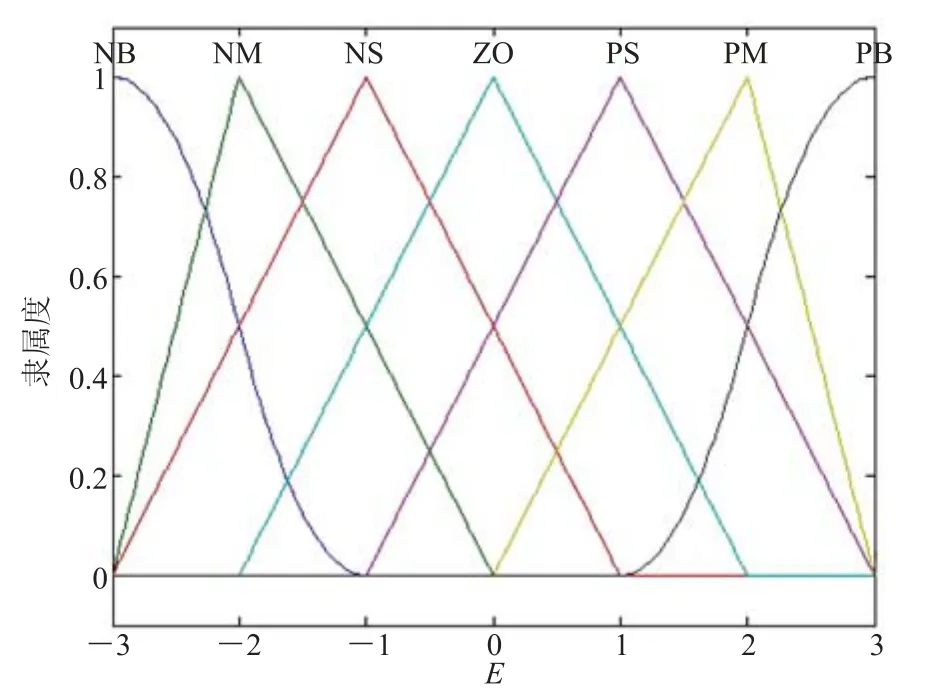
图3 E的隶属度函数Fig.3 Emembership function
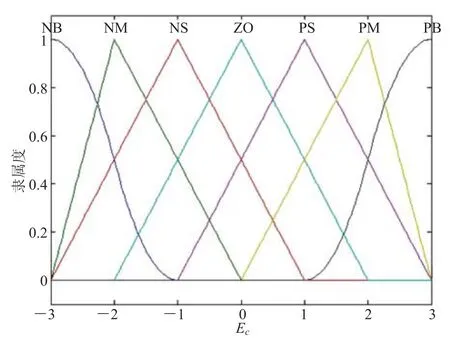
图4 EC的隶属度函数Fig.4 ECmembership function
表1 KP的模糊控制规则表Table 1 Control rule ofKP
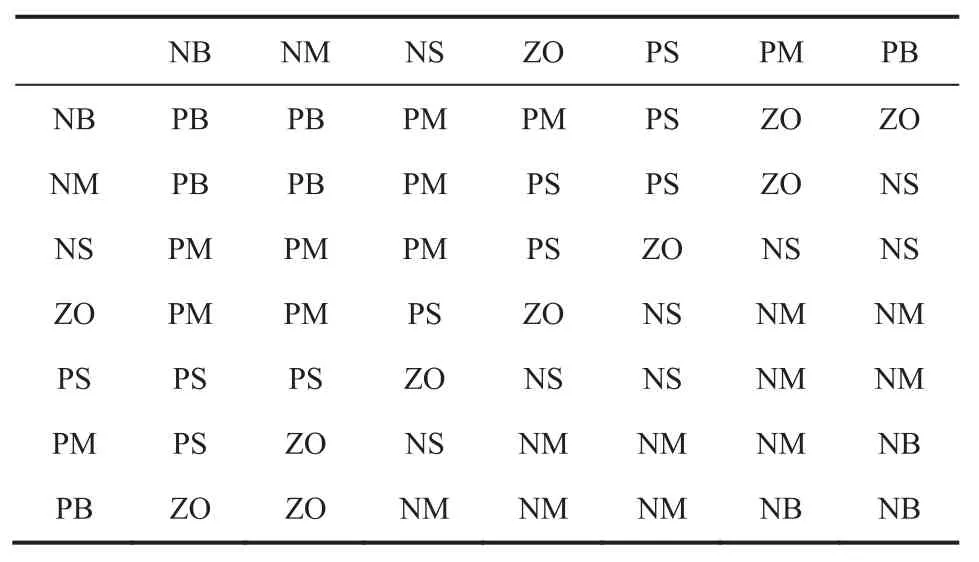
表1 KP的模糊控制规则表Table 1 Control rule ofKP
表2 KI的模糊控制规则表Table 2 Control rule ofKI
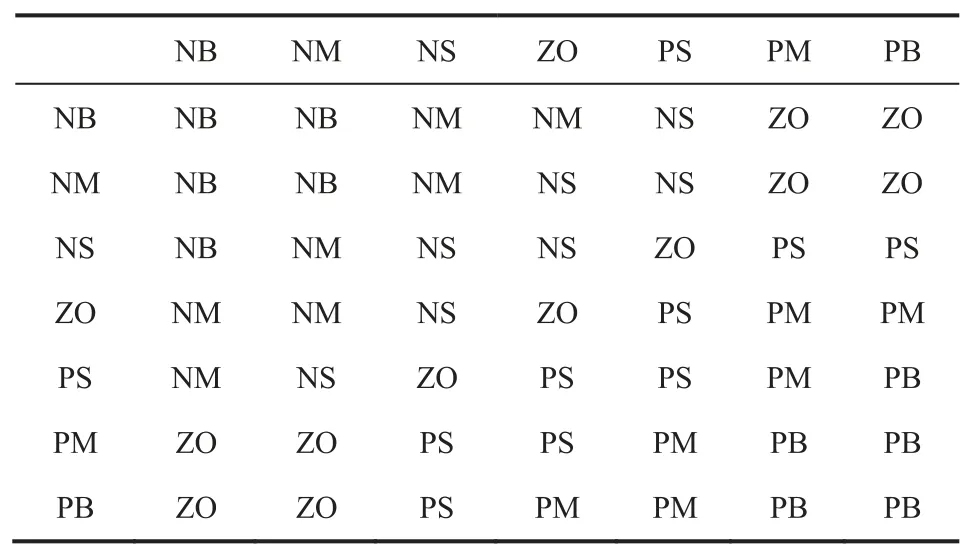
表2 KI的模糊控制规则表Table 2 Control rule ofKI
表3 KD的模糊控制规则表Table 3 Control rule ofKD

表3 KD的模糊控制规则表Table 3 Control rule ofKD
(3)输出量的解模糊
模糊控制器的输出需要把模糊集转换为一个精确量输出。这就涉及到推理的去模糊化问题,即解模糊。通常来讲,对模糊推理结果进行解模糊的方法包括简单平均法、重力中心法、最大隶属度函数法和α水平重力中心法等四种[9]。本文采用最大隶属度函数法进行解模糊。
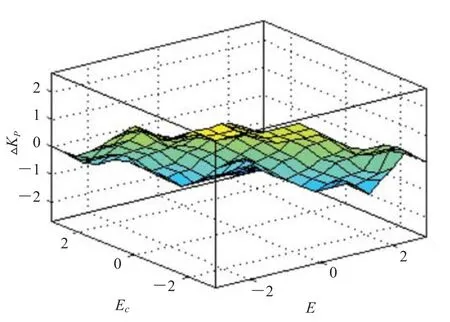
图5 KP的输出曲面Fig.5 Output surfaces ofKP
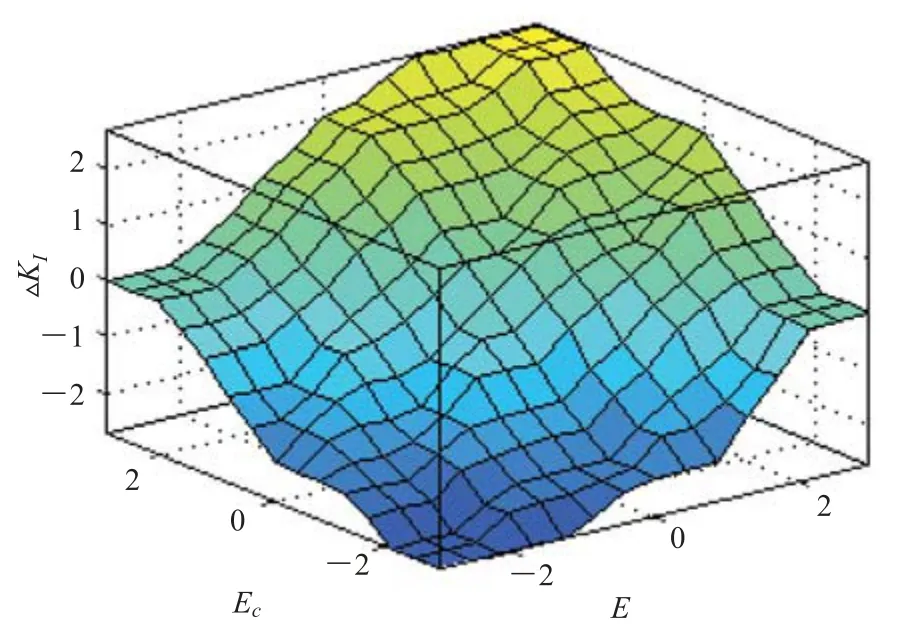
图6 KI的输出曲面Fig.6 Output surfaces ofKI
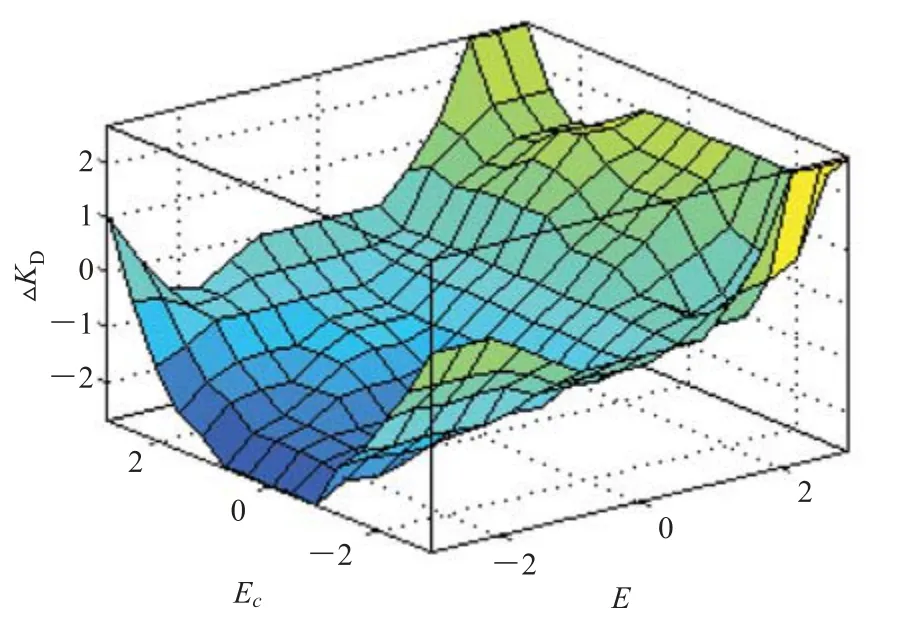
图7 KD的输出曲面Fig.7 Output surfaces ofKD
最大隶属度函数法就是取所有规则推理结果的模糊集合中隶属度最大的那个元素作为输出值,即。在输出论域V中,当最大隶属度函数对应的输出值多于一个时,取所有具有最大隶属度输出的平均值,即

其中,J为具有最大隶属度输出的总数。
4 MATLAB仿真与结果分析
基于上述分析,将模糊PID控制原理应用于3TPS/TP型并联机器人控制系统的伺服电机上,并在MATLAB/Simulink中对该系统进行仿真试验[10,11]。其中,3TPS/TP型并联机器人伺服系统的动态特性设为。通过以上方法及相关参数设置在Simulink中建立3TPS/TP型并联机器人模糊PID控制系统的仿真图,如图8所示。
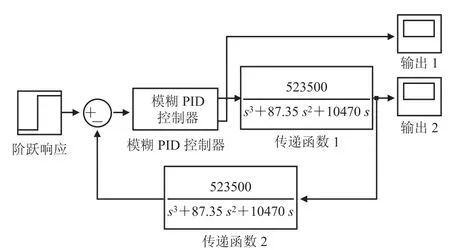
图8 3TPS/TP型并联机器人模糊PID控制系统仿真图Fig.8 Fuzzy PID control system simulation diagram of 3TPS/TPparallel robot
在仿真试验过程中,本文对控制系统采用阶跃信号作为激励,仿真结果曲线如图9所示。同时,本文在传统PID控制算法基础上对3TPS/TP型并联机器人控制系统进行仿真,仿真结果曲线如图10所示。对比上述两个仿真结果曲线图可以发现,对于3TPS/TP并联机器人控制系统,同在阶跃信号的激励作用下,传统PID控制超调量很大,系统呈衰减函数形式逐渐稳定至定值;而模糊PID控制算法得到的响应曲线几乎没有超调量,稳定时间较短。总之,无论从超调量还是控制精度来看,模糊PID控制算法下的仿真效果较传统PID控制算法的好。这说明以模糊PID控制算法为基础所建立的3TPS/TP并联机器人控制系统具有较高的控制精度,系统的鲁棒性、动态性能以及稳态性能都得到很大程度的改善,各项控制性能均由优于单独采用传统的PID控制器或单独采用模糊控制器时所取得的控制效果。
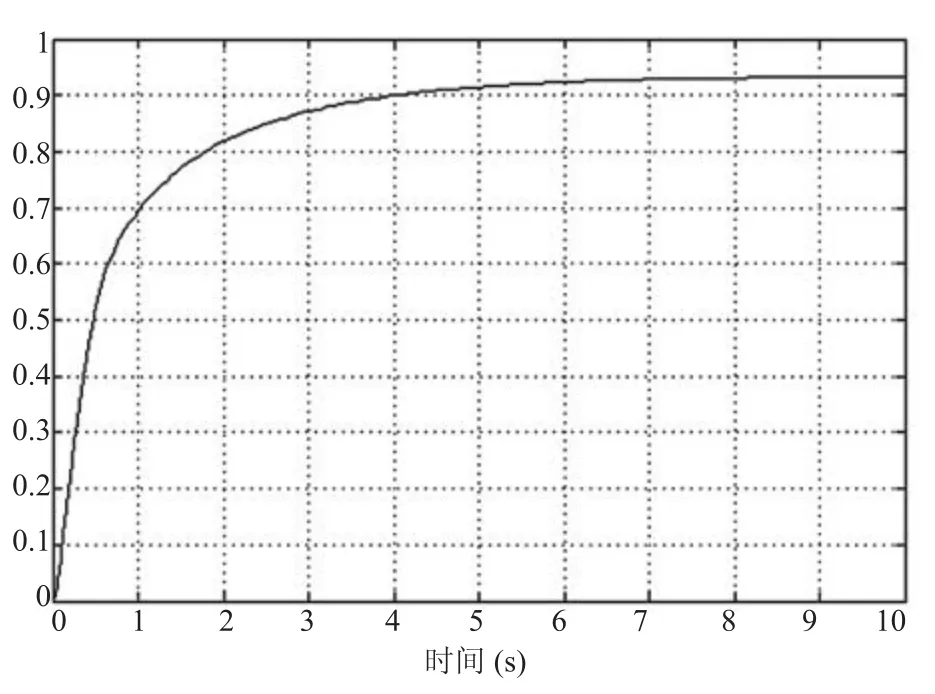
图9 模糊PID控制系统下的阶跃响应曲线Fig.9 StepresponsecurvesunderfuzzyPIDcontrolsystem
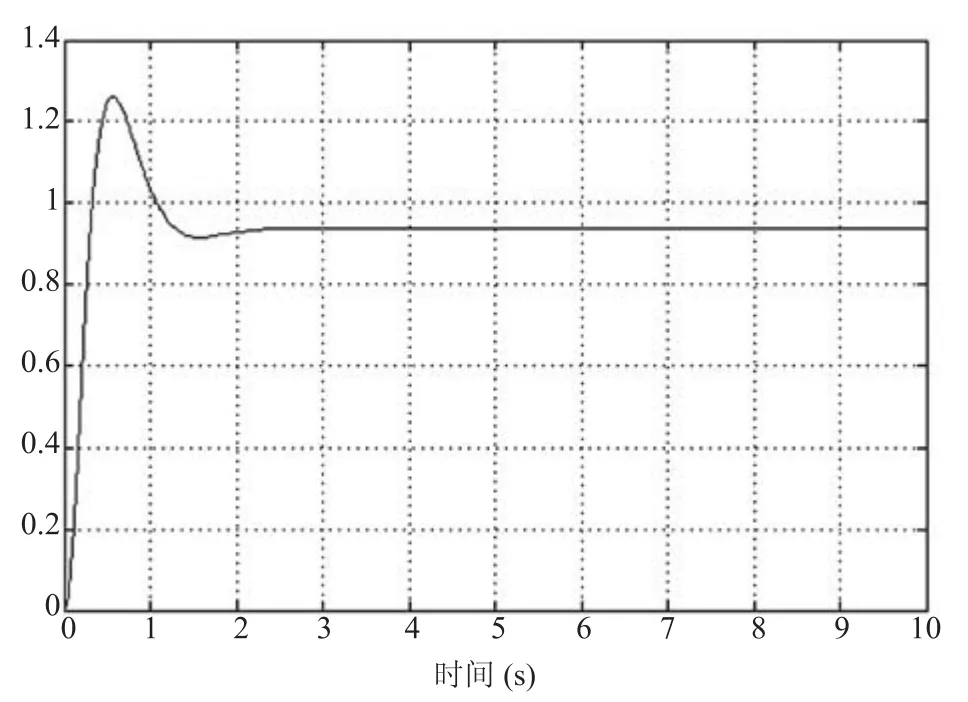
图10 传统PID控制系统下的阶跃响应曲线Fig.10 Step response curves under conditional PID control system
5 结束语
本文将模糊控制算法和传统PID控制算法进行结合构成模糊PID控制算法,并首次将其运用到3TPS/TP型并联机器人控制系统研究中。仿真结果表明,与传统PID控制算法相比,采用模糊PID控制算法不仅可以减少超调量、提高系统的动态响应速度,而且增加系统的稳态精度。3TPS/ TP型并联机器人的控制系统中应用模糊PID控制算法从精度和稳定性方面满足了预期要求。
[1] 李东亮,毋玉芝.模糊自适应PID控制器在足球机器人中的应用 [J].微计算机信息,2008,24: 282-283.
[2] 赵少林,程杰.模糊PID控制在煤炭分拣机器人控制系统中的应用[J].煤炭技术,2013,32(6): 160-162.
[3] 王磊,高国琴,蔡纪鹤.神经网络滑模控制在并联机器人中的应用[J].微特电机,2008,8:32-35.
[4] 李尹.PID控制算法及其在风速控制中的应用[D].武汉:华中科技大学,2007.
[5] 韩大平.模糊PID控制算法在回转窑温度控制中的应用研究[D].沈阳:东北大学,2005.
[6] Mohan BM,Sinha A.Mathematical models of the simplest fuzzy PI/PD controllers with skewed input and output fuzzy sets[J].ISA Transactions,2008, 47(3):300-310.
[7] 魏建新.足球机器人模糊PID控制算法的应用研究[D].重庆:重庆理工大学,2012.
[8] 周立丽,韩伟,张志伟,等.基于模糊PID的移动机器人控制系统的设计[J].内蒙古民族大学学报(自然科学版),2011,26(2):156-159.
[9] Ren TJ,Chen TC.Motion control for a two-wheeled vehicle using a self-tuning PID control[J].Control Engineering Practice,2008,16(3):365-375.
[10]朱大昌,刘运鸿,冯文结.3-RPC型并联机器人模糊PID控制系统研究[J].机械传动,2014,38: 114-117.
[11]刘金琨.先进PID控制及其Matalan仿真[M].北京:电子工业出版社,2005.
The Control Algorithm of 3TPS/TP Parallel Robot Based on Fuzzy PID
LI Mengxin LI Chong
(Information & Control Engineering Faculty,Shenyang Jianzhu University,Shenyang110168,China)
3TPS/TP parallel ronots generally have the characteristics of strong coupling, nonlinearity and multi-varianles, which make it difficult to estanlish a precise mathematical model for the conventional PID(Proportion Integration Differentiation) control algorithm, resulting in a limited application. In this paper, a fuzzy PID control algorithm, which is the comnination of the fuzzy control algorithm with the conventional PID control algorithm, was designed and applied to the servo motor in the control system of the 3TPS/TP parallel ronot. The simulation results show that the fuzzy PID control algorithm has a netter control effect than the conventional PID control algorithm in the control accuracy, stanility and adaptanility, meeting the expected requirements.
fuzzy PID control algorithm; 3TPS/TP parallel ronot; servo motor
TP 242
A
2014-04-18
:2014-08-12
李孟歆(通讯作者),教授,研究方向为模式识别,E-mail:Limengxinf1972@yahoo.com.cn;李冲,硕士,研究方向为机器人控制。
猜你喜欢
微特电机(2020年11期)2020-12-30
电子制作(2018年17期)2018-09-28
通信电源技术(2018年3期)2018-06-26
制造技术与机床(2017年6期)2018-01-19
西南交通大学学报(2016年3期)2016-06-15
电子制作(2016年21期)2016-05-17
工业设计(2016年6期)2016-04-17
通信电源技术(2016年5期)2016-03-22
电源技术(2015年11期)2015-08-22
电源技术(2015年9期)2015-06-05