基于CCP协议的混合动力公交车远程优化系统研究*
2015-01-07 07:55:24胡艳青闫斌杨林
汽车技术 2015年7期
胡艳青 闫斌 杨林
(上海交通大学)
基于CCP协议的混合动力公交车远程优化系统研究*
胡艳青 闫斌 杨林
(上海交通大学)
为充分发挥混合动力汽车在实际道路运行中的节油减排潜力,需要根据车辆实际使用环境特点对其整车控制参数进行优化标定。开发了一种稳定可靠的车辆远程优化标定系统,该系统包含车载控制优化单元(RCOU)、远程通讯网络和控制中心服务器及远程用户软件端等部分。依据车载CAN网络和GPRS通讯技术,并基于CCP协议的远程标定控制软件及通讯协议,制定了远程通信质量控制策略和车载标定安全控制策略。应用于某混合动力城市公交车的远程优化标定测试结果表明,该系统可实现对混合动力汽车的远程监测和标定优化。
1 前言
混合动力汽车的燃油经济性及排放性能很大程度上取决于整车的控制策略。整车控制策略开发通常依据各国的标准法规测试循环对策略中的控制参数进行标定并固化在整车控制器中[1]。然而,实际环境中车辆的运行工况复杂多变,车辆出厂时标定的控制参数通常不是实际运行路况下的最优控制参数,这就导致混合动力车辆在实际运行中表现出的节油率低于预期[2],有时甚至不节油。已有研究表明,针对公交线路的具体特征进行整车控制优化,可显著降低混合动力公交车的实际油耗[3]。因此,针对城市公交车不同线路工况的特点对混合动力公交车的整车控制参数进行优化再标定,成为当前亟待解决的重要问题。
当前,以德国Vector公司为代表的CAN/LIN总线工具[4]是业界广泛应用的车辆控制器标定工具,但其价格昂贵且只能用于现场标定。戴喜明等实现了基于GSM技术的车辆状态远程监测[5~7],但无远程标定功能;谢辉等[8]研究了电动汽车的远程数据采集及控制器远程标定系统,但未给出标定的实现方法,且操作不灵活,对通讯稳定性要求高。
本文建立了一套完整的混合动力公交车远程监测及控制优化系统,使混合动力公交车能够更快地适应其实际使用环境,充分发挥其节能减排的潜力。
2 远程优化系统结构及原理
2.1 系统结构
混合动力汽车整车控制器(Hybrid Control Unit,HCU)负责完成整车控制、协调各子系统控制器并执行整车的能量管理和故障处理。HCU与各主要子系统通过CAN通讯网络进行通讯。整车CAN网络主要包括混合动力汽车整车控制器(HCU)、发动机控制器(ECU)、电机控制器(DMCM)、电池控制系统(BMS)、变速器控制单元(TCU)、整车仪表显示控制单元、制动防抱死控制单元(ABS)等节点。混合动力系统的结构及CAN网络拓扑如图1所示。
为实现对车辆在各种实际线路运行数据的有效监测和安全可靠的标定,增强系统应用的便利性,开发了专门的车载远程控制优化单元RCOU(Remote Control Optimization Unit),并构建了混合动力城市公交远程优化系统,如图2所示。该系统由车载RCOU、GPRS网络、Internet网络和控制中心服务器、远程用户软件端等5部分构成。
2.2 系统工作原理
车载RCOU通过CAN通讯接口从整车CAN网络获取并存储当前车辆的运行状态及各子系统的信息,如电池荷电状态SOC、当前车速、驾驶员需求功率、电机状态等。上述信息进行打包后通过GPRS模块远程发送到GPRS网络,然后通过GGSN(Gateway GPRS Support Node)到达Internet网上的控制中心,并由控制中心实时进行数据解析和存储,实现对车辆的远程监控。标定人员可通过Internet登陆控制中心进行数据查询下载以及在线分析。RCOU自带外扩数据缓存区,可将未能及时上传的数据缓存以待后续上传,保证了监测数据的完整性。
控制优化及标定工程师可通过远程优化控制软件终端获取远程监测的线路运行数据,分析线路特征及整车运行状态并得到优化后的整车控制参数及相应标定值,再通过远程优化控制软件终端(用户PC软件终端),或直接通过控制中心将优化后的控制参数值按预定义的远程标定通讯控制协议,通过Internet和GPRS网络传递给车载RCOU。
RCOU通过协议解析获取并缓存待标定数据及远程控制指令信息,结合由CAN网络获取的车辆运行状态,基于标定安全控制策略进行安全性及合理性判断。当确认标定操作安全后,通过基于CCP协议开发的标定控制程序,以RCOU作为上位机,利用CAN通讯对HCU进行标定,完成标定校核和Flash刷写控制等,并将操作结果反馈给控制中心及用户软件端。用户通过用户端界面软件及密钥,利用Internet即可实现对混合动力车辆的远程监控和标定操作。
3 车载RCOU研发及通讯控制
RCOU作为车载优化标定的控制单元,为远程监测标定人员与车辆主控制器之间建立稳定可靠的通讯连接,并能实现对车辆运行状态信息的远程监测和对整车控制器HCU的远程标定控制功能。
3.1 车载RCOU硬件设计
RCOU主要由微控制器(MCU)、GPRS模块、电源模块、晶振模块、状态指示灯等组成,其硬件结构和实物见图3和图4。
RCOU通过CAN线接入整车CAN网络,完成与HCU之间的交互及对整车运行状态的获取。RCOU通过自身GPRS模块实现基于Internet的网络互联,完成用户端的标定操作与信息传递。在车辆停运时关闭GPRS模块,RCOU主控芯片处于休眠模式,系统功耗极低。在车辆正常起动运行时唤醒系统,从而保证系统在车辆运行期间实时在线。
3.2 GPRS远程通讯控制
由控制中心通过TCP/IP数据包解析获取标定人员发出的标定指令和标定数据包,按照GPRS网络传输要求对数据包进行拆分封装,其数据帧结构如图5所示。
GPRS数据帧各段定义及描述如表1所列。参考CCP协议,在“数据区”内放置远程标定指令及标定数据包,包括RAM标定指令、Flash标定指令、标定执行结果反馈指令等。这些操作指令对应的标定数据的放置结构同CCP协议一致,此处不再赘述。
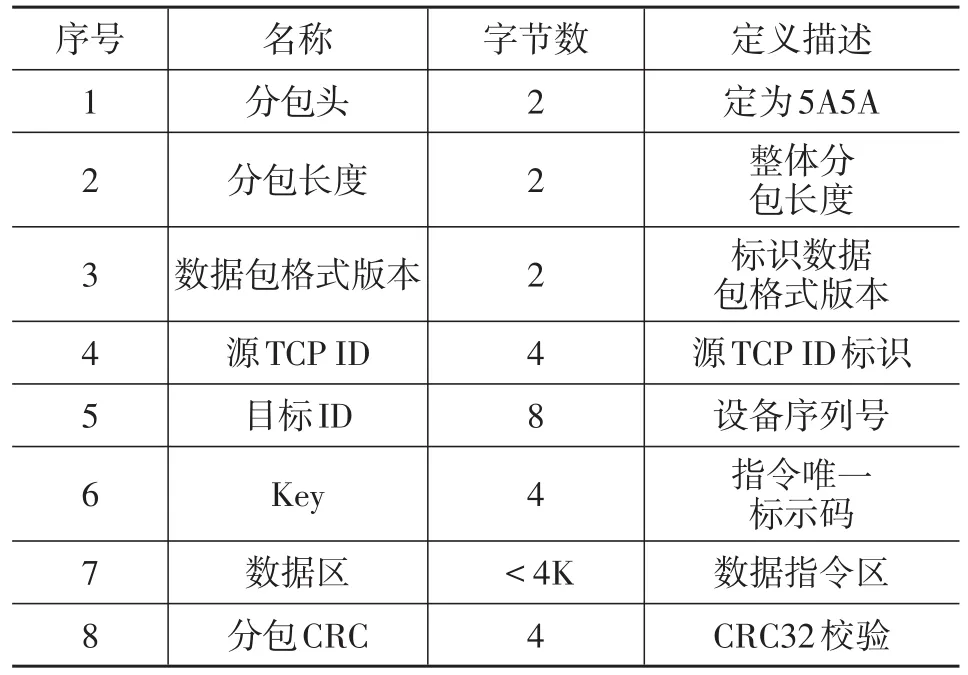
表1 GPRS通讯数据帧字段定义
在非标定模式下,RCOU以固定的周期按预定义的监测量数据组织结构,利用GPRS网络将监测的整车状态及运行信息进行上传。在发送数据包时,可控量是指发送周期T和报文长度L。根据文献[8]的研究,在一定范围内,定报文长度下发送周期T越长,通讯品质越好;在一定发送周期T下,报文长度L越短则通讯品质越好。由于所设计的RCOU具备数据缓存能力,本文设计的在线远程优化标定对通讯的实时性和速率要求比远程控制器编程要宽松很多。据此提出了一种简化的通讯自适应控制算法,即通过预先进行的通讯测试设定一个较优的通讯周期Topt,固定通讯周期后根据当前数据传输品质的优劣,线性地自动调整报文长度。该方法简单易实现,可在实际使用中保证通讯的稳定性。
4 基于CCP协议的远程标定
4.1 标定数据的组织结构和存储设计
4.1.1 车辆信息描述文件
每辆装备了RCOU的混合动力公交车具有唯一的车辆ID。客户端为每辆待优化车辆建立相应的数据记录文件,包括车辆ID、车辆描述信息、标定变量Map文件、标定变量值Hex文件、历史标定操作记录等。根据这些信息再结合车辆的动力配置、所在城市、运行线路等,实现对车辆的综合描述。
4.1.2 标定变量Map文件
建立整车控制标定Map数据库,其保存了当前车辆上标定数据区所有标定变量信息,包括变量名、数据类型、数据长度、在车载控制器Flash中的存储地址及RAM映射区的对应地址。Map文件负责描述待标定控制器中的标定变量,为基于CCP协议的标定提供支持,Map文件格式如表2所列。
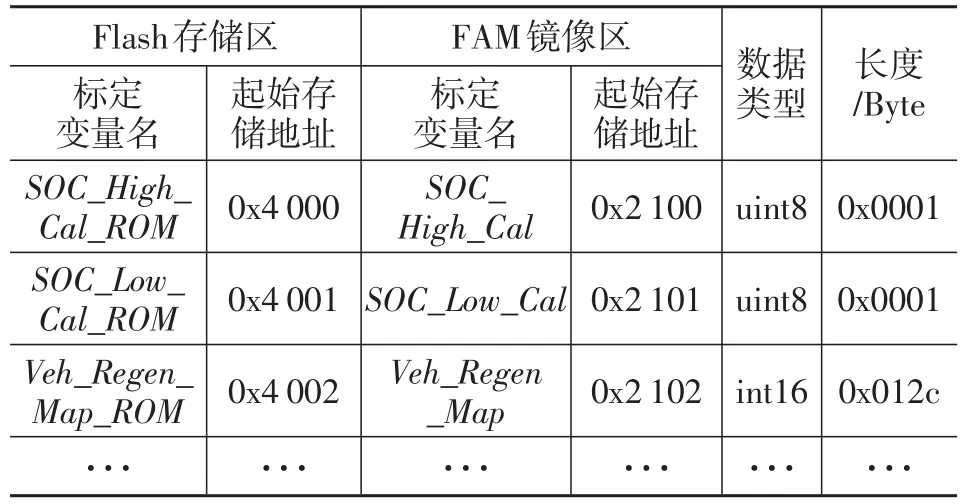
表2 标定变量Map文件格式
4.1.3 标定变量值Hex文件
采用Hex格式文件存储车辆控制器中可标定参数的地址和值,与Map文件通过标定变量的存储地址进行关联,在标定过程中显示车辆控制器中该标定变量的实际值,并在每次标定完成后实时更新Hex文件中对应变量值。
4.1.4 ASAP2标准的标定数据描述文件
ASAP2标准的目的是定义一个独立于计算机硬件、操作系统和生产商的标定信息数据库。ASAP2采用A2ML(ASAP2 Meta-language)的标记语言来编写标定信息描述文件,即a2l文件,其定义了一个类似于C语言的结构体来存放控制器中测量和标定量的信息,包括变量的地址、数据类型、上下限、表格的横纵坐标关联等信息。
标定优化人员利用a2l文件、Map文件和Hex文件,可在其本地计算机上远程建立完整的待优化混合动力整车控制器的标定参数描述系统,生成当前整车控制器内存状态的镜像,并为后续的标定优化提供基础。
4.1.5 标定数据存储区映射关系
鉴于混合动力汽车整车控制参数标定量较多,为方便整车标定,在所研制的HCU中建立了2套标定变量体系。其中1套变量体系存放在控制器的Flash存储区内,作为非易失性标定值;另1套与之对应的标定量定义在RAM存储区,作为程序运行中实际使用的标定量,称之为镜像RAM。两者通过每次系统上电初始化时从Flash区域读取相应变量的数值赋给RAM区的对应标定量完成镜像映射。
4.2 基于CCP的安全标定实现
4.2.1 远程标定实现流程
CCP(CAN Calibration Protocol)协议是XCP协议的具体应用[9],应用CCP协议可以实现对控制器中数据及参数的动态标定,相对于传统的标定系统,其具有稳定可靠、成本低等优点。
在HCU中集成CCP驱动程序,用于解析和执行CCP命令,实现监测和标定功能。利用MFC建立了用户端标定操作软件界面及相关驱动程序,软件主要包括用户操作界面、控制器标定监测量的Map/Hex/a2l文件、数据库操作模块、基于TCP/IP的通讯控制模块等。
标定开始时,由标定人员选择待标定车辆ID,并由关联信息加载该车整车控制器监测标定变量的Map/ Hex/a2l文件。在标定界面窗口由检索a2l数据库添加待标定的变量名,也可由Map文件检索获得新标定变量存储地址及类型信息并添加到a2l文件中。由标定参数的存储地址关联Hex文件并查询获得控制器中该参量的当前标定值。至此,在用户界面中可以生成当前待标定变量的标定窗口。远程优化标定操作流程如图6所示。
当需要对参数进行远程标定时,由标定人员修改标定变量值,选择标定类型(RAM标定指令或Flash标定指令)并确认,由通讯控制模块将标定信息和用户指令按标定通讯协议包格式进行打包,并按照TCP/IP协议将信息包发送到控制中心服务器,由控制中心通过GPRS网络将数据传送给车载终端RCOU,并由RCOU控制标定过程并反馈操作结果。标定人员也可以借助终端软件中的优化模块离线优化获得标定变量值。
如图7所示,标定分为RAM区标定和Flash刷写2个层次。在车辆运行时通过标定驱动程序按照用户的指令需求修改RAM区标定变量的值,可直接得到标定后系统运行效果,然后按照标定目标逐渐调整各标定值,直到系统达到标定目标。此时,RAM区中标定好的当前数值即为目标标定值,当需要将其固化到非易失的Flash分页中时,需要执行Flash刷写操作。
4.2.2 车载标定安全控制策略
4.2.2.1 远程通讯标定数据的有效性判断
如果通讯存在错误帧,并将这些错误帧信息误认为是有效标定数据发送给HCU,将引起系统运行混乱甚至发生严重事故。因此,在RCOU中对HCU中的标定参量设置了有效范围,并与该标定参量所处存储地址相关联。RCOU收到来自远程通讯的标定数据后,首先进行通讯帧校验,然后进行标定数据范围有效性判断。若指令及数据未能确认有效,则RCOU自动通过远程通讯请求用户终端或控制中心重新发送标定指令并同时反馈无效原因,直到有效标定数据符合有效性和完整性规定,RCOU才能确认本次标定指令有效,缓存当前新获取的标定信息及指令并进入标定控制操作流程。
4.2.2.2 标定RAM变量安全控制策略
车载智能标定控制单元通过解析远程通讯帧获取标定指令及数据,将指令及需要执行标定的参数地址及新的标定值等信息缓存在专用数据缓存区。
RCOU通过整车CAN网络获得整车的实时状态,当RCOU远程通讯正常,车辆停车且驾驶员未操作油门及制动踏板时,确认当前标定环境安全,允许执行RAM区标定操作;当HCU处于标定过程中时,延时整车控制器对驾驶员操作输入的响应,即延迟对动力总成的操作,待标定完成后恢复。
经测试确认,标定RAM变量(包括整车能量分配表格及相应参数等)所需时间极短,可以确保标定操作在1 s内完成。结合上述设定的标定安全控制逻辑,可确保远程标定人员对车载控制器快速安全标定,被标定车辆可以保持正常运行状态,减少了对车辆运行的影响。
4.2.2.3 Flash刷写安全控制策略
当远程标定人员发出了Flash刷写指令,即要求将本次标定后的数据刷写入Flash中时,RCOU将执行Flash刷写控制逻辑。由于Flash刷写时需要关闭当前HCU控制器的部分中断响应,会影响车辆的正常行驶,因此提出仅在如下2种情况下RCOU执行Flash刷写。
a.当整车处于安全待机状态下时,即车辆控制系统已上电运行并处于待机状态,且驾驶员没有驱动车辆的需求情况下,允许RCOU执行Flash刷写。同样设置刷写保护逻辑,在刷写完成前HCU不响应驾驶需求。由于刷写操作持续时间极短,不会影响驾驶员的操作感受。
b.当车辆运行结束后,驾驶员操作钥匙关闭车辆时,RCOU在获知驾驶员关闭钥匙开关操作后,利用HCU控制器的延迟关闭功能指令HCU延迟掉电,并开始执行Flash刷写操作。HCU完成Flash刷写后反馈刷写完成信息给RCOU,RCOU结合自身需求发出允许HCU掉电的指令,从而完成整个远程标定过程。
5 试验验证
将所开发的远程整车控制优化标定系统应用在苏州市某混合动力公交车上。原车出厂时设定了车辆纯电动起步控制的判断逻辑和相应标定变量,简化的判断逻辑如图8所示。
如图8所示,若当前SOC大于等于标定值SOC_EV_Cal,车速小于等于标定值Vss_Cal,并且整车需求扭矩小于标定值DM_EV_Max_Curr,则允许车辆采用纯电动驱动进行起步,此时发动机不参与驱动车辆。
Vss_Cal为控制车辆纯电动起步驱动的上限车速,该参数显著影响整车的电能消耗。由于目标公交车运行在市中心线路,客流量大且道路拥堵,导致车辆频繁起步。由于起步负荷重且出厂时标定的Vss_Cal较大,导致纯电动起步持续时间长,电池的SOC始终在较低水平波动,运行效率低,严重制约了车辆的整体燃油经济性,据此需要重新优化标定Vss_Cal。
为此,利用远程优化系统对目标车辆进行优化,远程标定测试结果如图9所示。由图9可看出,初始时原车Vss_Cal值为18 km/h,在约550 s处可见纯电动起步逻辑判断成立并且保持纯电动驱动持续直到车速接近20 km/h时。远程标定人员利用标定软件发出对Vss_Cal的RAM区标定指令,指令其新值为7 km/h。由于RCOU收到远程标定指令时车辆处于行驶过程中,不满足标定安全控制策略的要求,此时RCOU仅缓存待标定信息并不执行标定操作。待车辆在670 s时停车并经RCOU确认标定符合安全控制逻辑后,执行对HCU的标定及结果校核,并反馈标定结果给远程标定人员。通过远程监测,在车辆的下1次静止起步过程即图9中700 s附近处,可见车辆纯电动起步在车速上升至约7 km/h时退出,发动机开始参与驱动,车辆的运行符合标定预期,确认标定成功。同样,对于数据量较大的整车扭矩分配表格等标定参数也进行了远程标定测试,结果表明,远程优化系统能够实现对车载控制器的远程优化标定,且标定操作安全快速。
6 结束语
本文开发了基于远程通讯控制的混合动力汽车整车控制监测优化系统,该系统结构及车载软硬件平台运行稳定可靠。结合所建立的用户端软件、通讯协议及安全标定控制逻辑,系统实现了对混合动力车辆实际运行线路特征及整车运行状态的远程监测,以及对整车控制器参数的远程标定。通过在实车上的应用测试,验证了该远程优化系统的状态监测和远程安全标定功能,从而为提高混合动力车辆对其实际运行线路的适应性提供了安全便捷的途径,解决了现有标定手段存在的效率低和费用高的问题。
1 K Ça atay Bayindir,M A Gözüküçük,A Teke,A comprehen⁃sive overview of hybrid electric vehicle:Powertrain configu⁃rations,powertrain control techniques and electronic control units,Energy Conversion and Management,Feb.2011,52(2):1305-1313.
2 Sanjaka G Wirasingha,Ali Emadi.Classification and Re⁃view of Control Strategies for Plug-In Hybrid Electric Vehi⁃cles.IEEE TRANSACTIONS ON VEHICULAR TECHNOL⁃OGY,2011(60):111~122.
3 朱道伟.谢辉,严英,等.基于道路工况自学习的混合动力城市客车控制策略动态优化.机械工程学报,2010,46(6):33~38.
4 王黎明.CAN现场总线系统的设计与应用.北京:电子工业出版社,2008.
5 杨亚联,曹紫微.混合动力车辆远程采集监控系统的研发.重庆理工大学学报(自然科学),2004,24(4):1~7.
6 Camachog,Alducing,Gutierrez,et al.Software Development for Local Data Transfer for Mobile Applications Using GPS and GPRS Technology Electronics.16th International Con⁃ference on Electronics,Communications and Computers.Puebla:Mexico IEEE,2006:7.
7 戴喜明,袁涛,吴定雪.基于GSM/GPS/GIS车辆状态监控系统的设计与实现.微计算机信息,2006,22(9):246~248.
8 车延博,严英,谢辉.混合动力客车远程编程系统的无线网络通信控制.天津大学学报2009,42(7):603~607.
9 Wang Jun xi,Yang Lin,Fang Jing,et al.Development of a New Calibration System for Electronic Control Units Based on CCP.内燃机学报,2005,23(2).
(责任编辑文 楫)
修改稿收到日期为2015年2月1日。
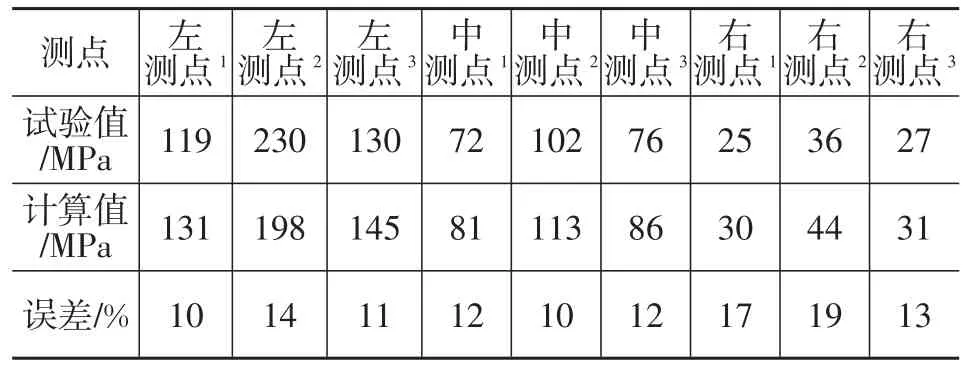
表4 电测试验各测点应力与有限元计算应力对比
参考文献
1 陈正康.CV9后悬扭梁轴总成的设计与分析:[学位论文].成都:四川大学,2007:11~17.
2 石亦平,周玉蓉.ABAQUS有限元分析实例讲解.北京:机械工业出版社,2006:125~130.
3 佟家慧.某微型车扭转梁后悬架结构分析与优化:[学位论文].长春:吉林大学,2011:59~60.
4 余志生.汽车理论.第5版.北京:机械工业出版社,2009: 108.
5 [日]自动车技术协会编,汽车工程手册编译委员会译.汽车工程手册:第1分册.北京:机械工业出版社,1984.
6 [日]汽车技术协会编,付篙元译.汽车强度.北京:机械工业出版社,1987.
7 刘鸿文.材料力学I.第4版.北京:高等教育出版社,2004: 244~245.
8 王东,江翁,汤晓飞,等.扭转梁式半独立后悬架系统开发.上海汽车,2011,(2):27~32.
9 张胜兰,郑冬黎,郝琪,等.基于hyperworks的结构优化设计技术.北京:机械工业出版社,2008:87~120.
(责任编辑帘 青)
修改稿收到日期为2015年5月1日。
Research on Remote Optimization System of Hybrid Electric Bus Based on CCP Protocol
Hu Yanqing,Yan Bin,Yang Lin
(Shanghai Jiaotong University)
To bring into full play the fuel saving and emission reduction potential of hybrid vehicle in real road driving,vehicle control parameters need to be optimized and calibrated according to characteristic of the vehicle’s operating environment.A stable and reliable vehicle remote optimization&calibration system is developed,which consists of remote control&optimization unit(RCOU),remote communication network,control center server and remote user software end,etc..Remote communication quality control strategy and onboard calibration safety control strategy are developed according to onboard CAN and GRPS technology,and remote calibration control software and communication protocol based on CCP protocol.Test results from remote optimization&calibration of a hybrid electric bus show that the system can be applicable to remote monitoring and calibration optimization of hybrid vehicle.
Hybrid vehicle,Control parameter,Remote calibration,CCP protocol
混合动力汽车 控制参数 远程标定 CCP协议
U469.7
A
1000-3703(2015)07-0056-06
国家自然科学基金项目(NSFC Program,No.51275291)资助。
猜你喜欢
茶叶通讯(2022年2期)2022-11-15 08:53:56
茶叶通讯(2022年3期)2022-11-11 08:43:50
机械研究与应用(2022年4期)2022-09-15 02:17:04
汽车实用技术(2022年15期)2022-08-19 02:48:08
汽车维修与保养(2020年11期)2020-06-09 05:42:16
中国惯性技术学报(2017年1期)2017-06-09 08:15:14
光学精密工程(2016年3期)2016-11-07 09:03:34
中国科技信息(2016年19期)2016-10-25 08:17:29
噪声与振动控制(2015年4期)2015-01-01 07:08:09
西安建筑科技大学学报(自然科学版)(2014年6期)2014-11-10 02:35:38