基于二自由度内模控制的PID参数整定方法研究
2015-01-04 08:51高峰
电子设计工程 2015年12期
高峰
(商丘师范学院 物理与电气信息学院,河南 商丘 476000)
内模控制设计方法简单,具有对偶稳定性,理想控制器特性和零稳态偏差特性,已被用于PID控制器设计,称为常规内模PID控制器。这种控制器兼有内模控制和PID控制的共同特点,但存在一个缺陷,就是系统只有一个参数可调,它同时控制着系统的动态性能和抗干扰性能[1]。要提高其中一种性能必须以降低另一种性能为代价,两种性能不能同时达到最优。本文研究了二自由度内模控制,并把它用于PID控制器的设计和参数整定,称为二自由度内模PID。实际应用和仿真证明了这种方法能够兼顾系统的动态性能和抗干扰特性,弥补了常规内模PID的缺陷。
1 二自由度内模控制
二自由度内模控制结构如图1。可以计算出图1中系统的输出

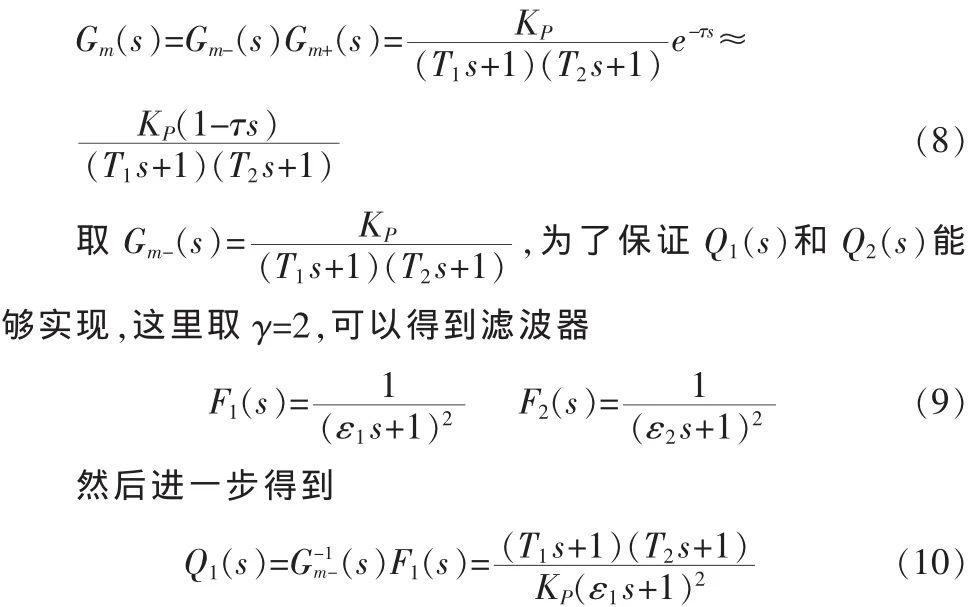
如果模型无差(G(s)=Gm(s)),则

式(2)表明,通过 Q1(s)的调节能提高系统的动态性能,而通过 Q2(s)的调节能提高系统的抗干扰性能。Q1(s)和 Q2(s)的设计可以采用两步法[2]。取


图1 二自由度的内模控制结构Fig.1 The structure of two-degree-of-freedom IMC
其中滤波器 F1(s)和 F2(s)取为下列形式:

ε1和 ε2为滤波器的可调参数,γ 的值保证 Q1(s)及 Q2(s)有理。
上述二自由度内模控制可以等价成图2的形式,这是一个一般反馈控制结构[3-5]。

图2 二自由度内模控制的等价形式Fig.2 The equivalent form of two-degree-of-freedom IMC
该系统输出为

将式(1)和式(6)的对应项进行对比得到

2 二自由度内模PID
把二自由度内模控制通过等效以PID控制来实现的方法称为二自由度内模PID。

根据式(7)计算 C1(s)和 C2(s)如下:
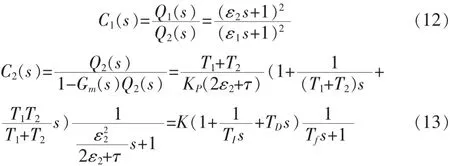
显然,能够利用PID控制器串联一个滤波器实现C2(s)。并通过对比得到参数如下:
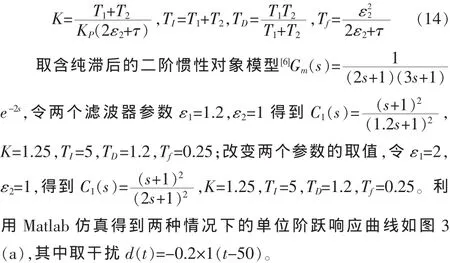

图3 对象的二自由度内模PID单位阶跃响应曲线Fig.3 Unit step response curve of two-degree-of-freedom IMCof the object
3 结束语
由仿真可知,系统的抗外界干扰的能力和鲁棒性能由决定,动态性能由和共同决定。因此,可以通过独立调节ε1和ε2达到所期望的性能。而且应该先调节好再调节,顺序不能颠倒。
[1]王树青.先进控制技术及应用[M].北京:化学工业出版社,2001.
[2]熊志强,王炜,邱祖廉.一种二自由度PID的实现[J].控制理论与应用,2003,22(4):17-19.XIONG Zhi-qiang,WANG Wei,QIU Zu-lian.A realiazation of two-degree-of-freedom PID[J].Control theory and applications,2003,22(4):17-19.
[3]刘柏春.IMC与自校正PID控制器[J].自动化与仪表,1990(1):36-41.LIU Bo-chun.IMC and self-tuning PID controller[J].Automation&Instrumentation,1990(1):36-41.
[4]于繁华,刘仁云.计算智能技术及其工程应用[M].北京:科学出版社,2010.
[5]方康玲,王新民,刘彦春,等.过程控制系统[M].2版.武汉:武汉理工大学出版社,2007.
[6]黄向华.控制系统仿真[M].北京:北京航空航天大学出版社,2008.
猜你喜欢
成都信息工程大学学报(2021年6期)2021-02-12
电子制作(2019年11期)2019-07-04
铁道通信信号(2019年1期)2019-03-21
电子制作(2018年16期)2018-09-26
电机与控制学报(2018年9期)2018-05-14
大经贸(2017年11期)2018-01-08
系统工程与电子技术(2016年7期)2016-08-21
火控雷达技术(2016年2期)2016-02-06
电测与仪表(2014年8期)2014-04-04
城市建设理论研究(2012年13期)2012-06-04