
基于最优转矩控制六相永磁容错电机故障补救策略的仿真研究
2015-01-03 05:41秦海鸿马亚飞李寒松严仰光
电源学报 2015年1期
荀 倩,秦海鸿,马亚飞,李寒松,严仰光
(1.南京航空航天大学江苏省新能源发电与电能变换重点实验室,南京210016;2.上海空间电源研究所,上海200245;3.南京航空航天大学机电学院,南京210016)
基于最优转矩控制六相永磁容错电机故障补救策略的仿真研究
荀 倩1,秦海鸿1,马亚飞2,李寒松3,严仰光1
(1.南京航空航天大学江苏省新能源发电与电能变换重点实验室,南京210016;2.上海空间电源研究所,上海200245;3.南京航空航天大学机电学院,南京210016)
为了满足航空电力作动系统高可靠性的要求,介绍了一种六相永磁容错电机驱动系统的拓扑结构。在介绍其结构特点的基础上,分析驱动电路电气故障,通过电路等效原理将功率管开路、短路和电机绕组短路故障转化为电机绕组开路故障,最后根据功率守恒原则,提出了基于最优转矩控制的故障补救策略,旨在当电机发生开路故障时,能够产生同正常运行时相同的输出转矩,以及最小的转矩脉动和铜耗。Matlab仿真结果表明当电机发生一相或两相开路故障时,系统输出转矩基本不变,从而验证了研究的最优转矩控制策略的可行性。
永磁容错电机;最优转矩控制;故障补救;开路故障
引言
随着新材料、电机技术、控制技术等的发展,未来飞机上将可能采用新型的电力作动器(electrically powered actuator),如集成电液作动器IAP(integrated actuation package)、电动静液作动器 EHA(electro-hydraulic actuator)和机电作动器 EMA(electro-mechanical actuator),从而实现所谓功率电传作动系统。电力作动系统被广泛应用于飞行舵面控制和燃油泵等关键传动系统中[1],因此具备高安全性、高可靠性的电力作动系统成为多电/全电飞机的一个显著特点。
据估计,当飞机所有飞行控制舵面均采用一体化电力作动器后,可使一般客机的燃油消耗节省5%~9%,地面设备减少30%~50%;可使军用飞机的起飞总重减少272~454 kg,飞机受轻武器攻击的受损面积减少14%[2]。而应用于电力作动器中的电机及其驱动系统应具有故障容错能力,即在发生故障后系统能够继续维持运行。
目前,国内外对于容错电机的研究主要围绕着开关磁阻电机[3-4]和转子永磁电机[5]进行。开关磁阻电机是一种典型的容错电机,其定子采用集中式绕组分布,相与相之间独立性好,转子上没有永磁体,工作时引起故障的因素少,故障率低,但是开关磁阻电机的转矩脉动大、功率密度低,其性能远不如永磁电机,因此限制了其在高功率密度及高可靠性的航空及军事领域的容错应用[6]。
针对开关磁阻功率密度低、噪声大的缺点,提出了永磁容错电机及其控制系统。近年来,容错控制算法得到了一定的发展。文献[7,8]利用磁链、电流与转子位置之间的关系提出通过查表的方式进行故障辨识及容错控制;文献[9]研究了一种六相永磁容错磁通切换电机,通过转矩脉动补偿实现开路故障容错,通过故障分解补偿法实现对短路故障容错控制,避免了复杂计算。但是两种控制策略都是针对单相故障提出的。文献[10]采用直接转矩控制对三相永磁容错电机进行了控制与故障分析,但未能给出故障模式下的控制策略;文献[11,12]对具有冗余特性的永磁容错电机进行了短路故障分析与控制,利用转矩等效原理,实现了短路故障的容错控制,为涉及开路故障。电机驱动系统故障会严重影响电机及其控制系统的输出特性,因此研究故障时的补救控制策略具有重要意义。
与文献[7-12]不同,本文通过电路等效原理将电气故障转化为绕组开路或短路故障,开路故障补救策略以转矩恒定作为约束条件。为此提出了2种补救策略,根据转矩与电流成正比的关系,可以增加无故障相的电流,但采用该补救策略,转矩脉动、最大铜耗都较大,且在不同故障条件下补救结果不同;为了减小转矩脉动和铜耗,以转矩恒定和铜耗最小作为约束条件,补偿由于故障产生的额外转矩,由此方法得到相电流。采用电流滞环控制方法利用Matlab对开路故障补救策略进行仿真分析,其仿真结果表明该方法是一种零转矩脉动的最优转矩控制策略,验证了故障补救的有效性。
1 永磁容错电机结构及数学模型
六相十极永磁容错电机剖面结构如图1所示。定子齿采用极靴结构、每相绕组采用隔齿绕制,使其具有磁隔离;各相绕组采用集中式隔齿绕制使其具有物理隔离;每相绕组都由独立的H桥供电,并使其具有电气隔离;每相绕组物理隔离能够保证热隔离;设计绕组的电感接近标幺值1,使电机绕组具有大电抗。

图1 六相十极永磁容错电机剖面结构示意Fig.1 Sketch map of six-phase ten-pole PMFTM profile
电机结构的磁隔离、物理隔离、电气隔离和热隔离保证了故障隔离且不会传染。通过设计较大的电枢电感保证了大电抗,可以抑制短路电流,防止短路电流过大导致电机退磁和过热。
由于永磁容错电机的各相绕组之间互感值近似为0,可以忽略不计,同时各相绕组采用独立H桥驱动,因此各相绕组在电路和磁路上相对独立。以六相永磁容错电机为例,A相绕组电路模型如图2所示,由此可得电压方程为

式中:p为微分算子;R为相电阻,Ω;L为相同步电感,H;ua、ub、uc、ud、ue、uf分别为六相绕组定子端电压,V;ea、eb、ec、ed、ee、ef分别为六相绕组永磁体反电势,V;ia、ib、ic、id、ie、if分别为六相绕组定子电流,A。

图2 A相绕组等效模型Fig.2 Phase A winding equivalent model
假设磁链在电角度为0时A相绕组匝链永磁体磁链最大,则六相十极永磁容错电机的反电势和磁链的方程为

式中,ψa、ψb、ψc、ψd、ψe、ψf为六相绕组反电势磁链,Web;ψm为永磁体磁链幅值,Web;θ为电角度,(°);np为转子极对数。
以六相永磁容错电机为例,由功率平衡方程,可以得到电磁转矩Te的表达式为

式中,ω为机械角速度,rad/s。
2 故障分类及其分析
2.1 故障分类
采用H桥驱动的六相永磁容错电机中,潜在的电力故障可能发生在逆变电路开关中或各相绕组中,其电气故障分布如图3所示。

图3 驱动电路电气故障分布Fig.3 Electrical fault distribution of drive circuit
逆变器电路开关故障包括母线故障、开关管或二极管故障,故障分布于图3的①~⑧和⑪处。母线故障分为输入电源线开路故障和正负极短路故障。H桥主功率电路由4个开关管S1~S4和4个二极管D1~D4组成,每个功率开关管和二极管都有可能发生短路和开路故障,而这些故障又可以任意组合。因此,H桥逆变电路故障类型比较繁琐。
电机绕组故障可分为绕组开路、绕组端部短路和匝间短路3种,故障分布于图3的⑨、⑩位置。其中绕组匝间短路故障最严重,而且随机性较大,但可以通过短接端部绕组的方式实现容错。
开关故障可以转化为绕组故障,因此电气故障最终可分为绕组开路故障和绕组短路故障。
2.2 控制状态分析
2.2.1 电机正常运行
最优转矩控制算法的目标是使输出转矩恒定,根据永磁容错电机数学模型,各相正常时电磁转矩表示为

式中:ek(t)为第k相瞬态反电势,V;ik为第k相瞬态电流值,A;Te为电机输出电磁转矩,N·m;C为常数,即系统要求的输出转矩,N·m。


因为定子电阻R为定值,所以定子铜耗最小问题可转化为定子各相电流平方和最小问题。应用Lagrange乘数法,令

求L对各个变量的偏导数,并令偏导数都等于0,得
求得各相电流表达式为

由式(8)可知,只有保证瞬时相电流和瞬时反电势相位一致时,才能获得一个具有最小铜耗的输出转矩。
2.2.2 绕组开路故障
绕组开路故障是一种很常见的故障,可以通过相电流传感器检测出来。当某相绕组发生开路故障,那么该绕组两端电压正常,但电流为0。在一个六相永磁容错电机中,如果反电动势是正弦的。那么零转矩脉动的相电流为

式中,Im为电机相电流的幅值。则当电机正常运行时总的输出转矩为

如果第一相绕组出现故障,并且没有采用故障补救策略,那么电机总的输出转矩为

2.2.3 绕组短路故障
因为电机的每相绕组都采用独立的H桥供电,无论短路故障发生在上、下桥臂或者直流电源,该相绕组都会发生短路故障。
2.2.4 开关管开短路故障
以S1管为例,当S1管发生开路故障时,S1、S4管供电通路被切断,绕组电流只有2条通路,S1、S1管和D1、D4管交替导通,如图4所示。若不采取补偿策略,该相逆变器运行在单向导通模式,则该相相电流波形为正弦半波。

图4 S1管发生开路故障示意Fig.4 Sketch map of open-circuit fault of S1
当S1管发生短路故障时,S1、S2桥臂直通,流过采样电阻上的电流瞬间升高,同样会引起该相绕组发生短路故障。
3 故障补救策略研究
电机的补救策略有2个作用:①防止一个普通故障演变为一个严重故障;②补偿转矩损失,平稳由于故障导致相电流的损失而产生的转矩脉动。
输出转矩与相电流成正比,所以在发生故障后为了补偿转矩的损失,第1种故障补偿策略是采用平均增加无故障相的电流值,使永磁容错电机输出平均额定转矩的控制方法。该策略会产生一个比较高的转矩脉动,但在某些场合,因为需要电机拥有一个比较低的噪声、高的效率和非常好的人机互动,所以降低电机的转矩脉动是很重要的[13]。因此,2003年英国谢菲尔德大学的研究人员提出了永磁容错交流电机的最优转矩控制算法。
3.1 增加平均电流的故障补救策略
在永磁容错电机中,输出转矩和相电流成正比,因此为了保持故障时的输出转矩的大小和正常运行时的一致,需要提高正常工作相的电流值。假设电机正常运行时相电流的峰值为Im,则在电机发生开路故障时无故障相的电流峰值Imrs的表达式为

式中:n为电机相数;m为发生开路故障的相数。
对于六相永磁容错电机,其铜耗可表示为

式中:Ia、Ib、Ic、Id、Ie、If分别为相电流的有效值。
如果电机发生一相开路故障,为了保证输出转矩恒定,那么其他5相的电流需要增加到原来的1.2倍。则输出转矩表达式为

由式(13)、式(14)可得,在故障情况下的转矩脉动为40%,最大铜耗是正常情况下的1.44倍。
当电机的任两相同时发生开路故障时,其他4相的电流变为原来的1.5倍,其输出转矩的表达式为

由式(14)、式(15)可得,在故障情况下的转矩脉动为50%,最大铜耗是正常情况下的2.25倍。
由此可见,采用该补救策略,转矩脉动、最大铜耗都较大,且在不同故障条件下补救结果不同。3.2零转矩脉动最优故障补救策略
针对增加平均电流故障补救策略的不足,提出了一种零转矩脉动的故障补救策略。如果一个六相永磁容错电机某相发生了开路故障,那么该相将不会对输出转矩有贡献。为了产生相同的输出转矩,其余5相的相电流将被改变。
故障态的最优转矩控制算法与正常态时相似,但需要加入因故障产生的额外转矩,其控制目标是使故障态时输出转矩恒定,即

式中:Tf(t)为m故障相产生的瞬态转矩。
当第m相绕组发生开路故障时,有

当第m相绕组发生短路故障时,有

取故障态时的定子铜耗最小为目标函数,即

应用Lagrange乘数法,令

求L对各个变量的偏导数,并令偏导数都等于0,得

求得各相电流为

故障时的相电流分母缺少了故障相反电势的平方,因此分母变小,而且它不再是常数,而随着角度不同变化;同时分子多一项补偿转矩Tf(t)(即故障相产生的转矩)。由式(22)计算出的正常相电流呈非正弦变化。
策略1可以补偿输出转矩,但会产生一个比较大的转矩脉动;策略2可以得到一个平稳的输出转矩,但数学模型比较复杂。为了得到较好的容错性能,本文对策略2的补救策略进行了仿真分析。
4 仿真分析
本文搭建了六相永磁容错电机的Matlab控制模型,针对电机正常运行、发生一相开路故障或两相开路故障进行了仿真分析,并且对电机发生故障之后采取了补救策略,补偿输出转矩,实现了电机的容错控制。
4.1 六相容错电机正常运行
电机正常运行时,六相定子电流为正弦波如图5所示,六相永磁容错电机的输出转矩如图6所示。由图6可见,转矩也是稳定的,采用的电流滞环控制策略是可行的。
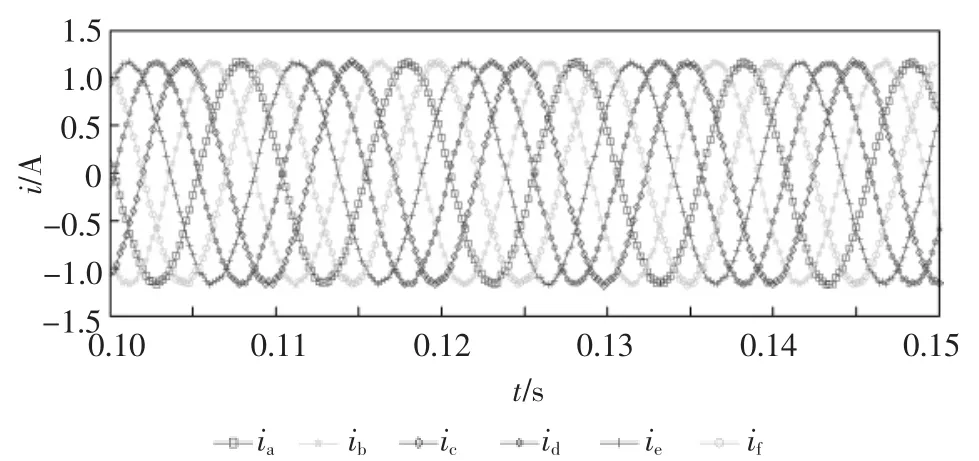
图5 六相永磁容错电机正常运行时的定子电流Fig.5 Stator currents of six-phase PMFTM under normal operation

图6 六相永磁容错电机正常运行时的输出转矩Fig.6 Output torque waveform of six-phase PMFTM in normal operation
4.2 采用补救策略后电机的运行结果
电机发生开路故障,存在很大的转矩脉动,严重影响电机性能。为此,对电机发生一相、两相开路故障采用零转矩脉动的最优转矩故障补救策略,电机定子电流和输出转矩的仿真结果如下。
4.2.1 一相开路故障
采用故障补救策略补偿其他相的电流值,从而达到了平稳输出转矩的目的。图7为采用故障补救策略后,其他5相的电流都得到了增加,其中第3相的电流值变化最大。图8显示采用故障补救策略之后,输出转矩和正常运行时基本一致,输出转矩不受故障相的影响。

图7 一相绕组开路时采用补救策略后的六相永磁容错电机的相电流Fig.7 Phase currents of six-phase PMFTM with one winding open after using remedial strategy

图8 一相绕组开路时采用补救策略后的六相永磁容错电机的输出转矩Fig.8 Output torque waveform of six-phase PMFTM with one winding open after using remedial strategy
4.2.2 两相开路故障
电机发生两相开路故障后,采用补救策略后的电机相电流如图9所示,由图可见,4相电流都得到了增加,其中第2相和第3相电流的改变幅度比较大,并且大于1相开路时采用补救策略后的第3相电流;图10为采用补救策略后的电机输出转矩,可见转矩补偿之后和电机正常运行时的转矩一致。

图9 两相绕组开路时采用补救策略后的六相永磁容错电机的相电流Fig.9 Phase currents of six-phase PMFTM with two windings open after using remedial strategy

图10 两相绕组开路时采用补救策略后的六相永磁容错电机的输出转矩Fig.10 Output torque waveform of six-phase PMFTM with two windings open after using remedial strategy
5 结语
本文从六相永磁容错电机的结构及数学模型出发,对电机故障进行了分类,并对各类故障进行了分析。以控制后转矩输出满足正常转矩需求为前提,提出了电机开路故障的容错控制策略,调整非故障相电流的幅值和相位,使故障前后电机输出的电磁转矩相等,并且转矩脉动和铜耗达到最小的目标。通过理论推导和仿真分析验证了采用的补救策略的正确性和可行性。
[1]Boglietti A,Cavagnino A,Tenconi A,Vaschetto et al.The Safety Critical Electric Machines and Drives in the More Electric Aircraft:a Survey[C].IIECON’09.35th Annual Conference of IEEE,2009:2587-2594.
[2]郝振洋.六相永磁容错电机及其控制系统的设计和研究[D].南京:南京航空航天大学 ,2010.Hao Zhenyang.Design and Research of Six Phases Fault Tolerant Permanent Magnet Motor and Its Control System[D].Nanjing:Nanjing University of Aeronautics and Astronautic,2010(in Chinese).
[3]李亮波,刘继忠,张华.两相步进电机的控制及微驱动器的设计[J].微电机,2011,44(2):105-107.Li Liangbo,Liu Jizhong,Zhang Hua.Design of micro-driver for two phase step motor[J].Micromotors,2011,44(2):105-107(in chinese).
[4]孙正鼐,李婷,张虹.两相大功率步进电机驱动控制电路设计[J].微电机,2009,42(2):61-64.Sun Zhengnai,Li Ting,Zhang Hong.Design of control drive circuit for two phase high step motor[J].Micromotors,2009,42(2):61-64(in Chinese).
[5]王帅夫,刘景林,杨士河.基于DSP的步进电机多轴控制系统研究[J].计算机测量与控制,2011,19(1):95-97.Wang Shuaifu,Liu Jinglin,Yang Shihe.Study on control system of multi-axis stepper motor based of DSP[J].Computer Mesurement&Control,2011,19(1):95-97(in Chinese).
[6]Jack A G,Mecrow B C,Haylock J.A Comparative study of permanent magnet and switched reluctance motors for high-performance fault-tolerant applications[J].IEEE Transitions on industry Applications,1996,32(4):889-895.
[7]Mecrow B C,Jack A G,Haylock J A.Fault tolerant permanent magnet machine drives[J].IEE Proceedings of Electrical Power Applications,1996,143(6):437-442.
[8]Haylock J A,Mecrow B C,Jack A G.Enhanced current control of high-speed PM machine drives through the use of flux controllers[J].IEEE Trans.on Industry Applications,1999,35(5):1030-1038.
[9]吴一丰,邓智泉,王宇,等.六相永磁容错磁通切换电机及其单相故障的容错控制 [J].电工技术学报,2013,28(3):71-79,106.Wu Yifeng,Deng Zhiquan,Wang Yu,et al.Six-phase fault-tolerant flux switching permanent magnet motor and control strategy for single-phase fault condition[J].Transactions of China electrotechnical society,2013,28(3):71-79,106(in Chinese).
[10]刘洋,刘东星,朱景伟.三相永磁容错电机直接转矩控制仿真建模[J].电机技术,2013(2):23-27.Liu Yang,Liu Dongxing,Zhu Jingwei.Simulation modeling of direct torque control of three-phase fault-tolerant permanent magnet motor[J].Electrical Machinery Technology,2013(2):23-27(in Chinese).
[11]黄义红,郝振洋,穆晓敬.基于双绕组永磁容错电机双余度控制系统研究[J].电工电能新技术,2014,33(6):36-40,74.Huang Yihong,Hao Zhenyang,Mu Xiaojing.Dual-redundancy fault tolerant permanent magnet motor control system[J].Advanced Technology of Electrical Engineering and Energy,2014,33(6):36-40,74(in Chinese).
[12]吉敬华,刘文庆,赵文祥.一种永磁容错电机短路故障的补偿控制[J].微电机,2014,47(2):24-28.Ji Jinghua,Liu Wenqing,Zhao Wenxiang.Remedial shortcircuit control of permanent magnet fault-tolerant motor[J].Micromortors,2014,47(2):24-28(in Chinese).
[13]M dai,Keyhani A,Sebastian T.Torque ripple analysis of a PM brushless DC motor using finite element method[J].IEEE Transactions on Energy Conversion,2004,19:40-45.
Research of Six Phase Fault Tolerant Permanent Magnet Motor Simulation Based on Optimal Torque Control
XUN Qian1,QIN Haihong1,MA Yafei2,LI Hansong3,YAN Yangguang1
(1.Jiangsu Key Laboratory of New Energy Generation and Power Conversion,Nanjing University of Aeronautics and Astronautics,Nanjing 210016,China;2.Shanghai Institute of Space Power,Shanghai 200245,China;3.College of Mechanical and Electrical Engineering,Nanjing University of Aeronautics and Astronautics,Nanjing 210016,China)
In order to meet the requirement of high reliability in air power actuation systems,a topology of sixphase fault tolerant permanent magnet motor drive system is introduced.Based on its structural features,the drive circuit electrical fault is analyzed,the fault of power device open,short and motor windings short can be transformed into the motor windings open by the equivalence principles.Finally,the optimal torque control method is proposed based on power conservation principles,aiming at providing the same output torque as it normally does,with minimum torque ripples and copper loss,when one phase or more than one phase open circuit fault occurs.All the Matlab simulation results show that the system output torque are essentially the same when the motor windings are one phase or two phase open with the normal condition,then the feasibility of optimal torque control strategy in this paper.
Fault tolerant permanent magnet motor;optimal torque control;fault remedied;open fault
荀倩(1990-)通信作者,女,硕士研究生,研究方向:电力电子与电力传动,E-mail:XQ09086320@163.com;
秦海鸿(1977-),男,博士,副教授,研究方向:碳化硅功率器件应用技术、功率变换技术、电机控制,E-mail:qinhaiho ng@nuaa.edu.cn;
马亚飞(1987-),男,硕士,工程师,研究方向:电源技术,E-mail:masust@163.com;
李涵松(1975-),男,博士,副教授,研究方向:特种加工和微细加工、电机控制,E-mail:hsli@nuaa.edu.cn;
严仰光(1935-),男,教授,博导,研究方向:航空电源,E-mail:yangguang@nuaa.com。
10.13234/j.issn.2095-2805.2015.1.28
:TM 46
:A
2014-07-22
教育部博士点基金项目(20123218120017);江苏省新能源发电与电能变换重点实验室开放基金项目(ZAB11002-14);江苏省高校优秀科技创新团队项目
Project Supported by Doctoral Education Fund Project(20123218120017);Jiangsu Key Laboratory Fund Project of New Energy Generation and Power Conversion(ZAB11002-14);Jiangsu University Innovation Team of Outstanding Scientific and Technological project
猜你喜欢
中国特种设备安全(2022年3期)2022-07-08
重庆理工大学学报(自然科学)(2022年5期)2022-06-18
微电机(2022年1期)2022-03-21
建材发展导向(2021年7期)2021-07-16
青年歌声(2019年2期)2019-02-21
知识经济·中国直销(2017年11期)2017-11-28
中国公路(2017年16期)2017-10-14
客车技术与研究(2015年3期)2015-08-24
舰船科学技术(2015年8期)2015-02-27
地震研究(2014年1期)2014-02-27
