激光辅助智能车障碍物探测方法研究*
2015-01-01 03:12吴琳琳刘生峰
西安工业大学学报 2015年1期
雷 鸣,吴琳琳,刘生峰
(1.西安工业大学 电子信息工程学院,西安710021;2.中国兵器工业集团 试验测试研究院,华阴714200)
智能车可看作是能够移动的四足机器人或地面自主车[1].近年来,为了实现自动,无人和安全驾驶的目标.智能车辆领域的关注度大大增加,研究进度也是获得了长足进展,而发展自动避障的计算机视觉等关键技术[2]也是目前研究的一个主要方向.目前,在智能车光学图像避障研究发展过程中,胡凌山等人应用基于立体视觉的被动式障碍物探测技术[3-5]实现了检测障碍物的目标,但是该方法图像间匹配复杂,实时性差,很难满足智能车快速避障的要求.赵一兵[6]等采用通过将激光雷达安装于车头的激光雷达探测障碍物的技术,达到实现障碍物探测的目的;肖雪[7]等人在自主移动机器人研究中提出光流场的障碍物探测技术,通过摄像机获取的序列图片对光流的变化进行估计.然而由于运动目标相对较多、速度太快或太小则达不到理想效果,因此将此方法应用于对实时性要求较高的智能车辆视觉导航系统中是不现实的;基于多传感器融合的障碍物探测技术,是障碍物探测领域的一个重要发展方向.Bruno Steyx[8]等已经研制出在车身上配备有很多种功能各异传感器的智能车辆,通过这些传感器获取的信息融合来实现道路跟踪和障碍物探测的目的.但车身装置多种传感器,造价较高.文中提出一种多线激光投射实现障碍物探测的方法.此方法采用主动式的激光投射,克服了双目立体视觉探测时匹配的缺点;运用简单的激光投影装置和摄像机,解决了激光雷达和多传感器探测方法成本高的问题;获取信息含量丰富的图像时间较短.
1 多线激光投射探测障碍物的方法
如图1所示,利用智能车上安装的激光投射装置向目标障碍物投射激光光条,投射的激光光条可以覆盖整个的障碍物,根据光条在障碍物上的变形状态来计算障碍物体的三维信息.当整个激光完成面投射时,实时记录含有激光光条的图像信息,将图像作为系统的输入数据传递给计算机.计算机经过相应的处理算法最后输出的结果是所拍摄障碍物的二维图像中每个像素的三维坐标信息.实验的主要设备是激光投射装置、摄像机、计算机.
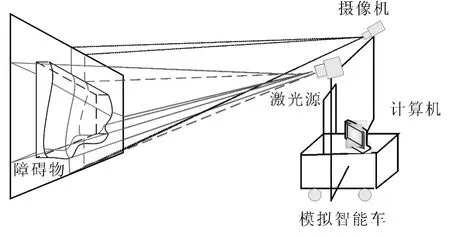
图1 多线激光探测系统Fig.1 Detection system with multi-line laser
基于多线激光投射法的障碍物探测,实质上借鉴了主动式光学三角探测的方法,用多个激光源的装置发出多条激光线光束,将多条激光束投射到目标障碍物上,投射过程中激光束要与摄像机保持一定的夹角,摄像机从投影的侧面获取多条线激光在物体上形成的影像.如果存在障碍物时,激光光条图像就是断开的线段.观察断开的位置,通过算法建模与求解,可得到障碍物与智能车的距离.
如果障碍物不规则,表面凸凹不平会使竖条线激光带在图像上形成一定的扭曲,针对每条激光光条的变形情况通过光学三角探测原理,将扭曲的平移量转换为三维曲面起伏值,遍历障碍物表面所有的光条,从而获得目标障碍物表面的三维信息.
如图2所示,假设实验所选用的接收装置摄像机的成像模型为小孔成像模型,它的焦距为f,接收装置距目标物体距离为d,激光器的光轴与接收装置光轴所呈现夹角为θ,设接收装置在焦距f处成像时,实际长度为M的目标物体在摄像机的成像画面中的长度为m,则有以下的关系式成立
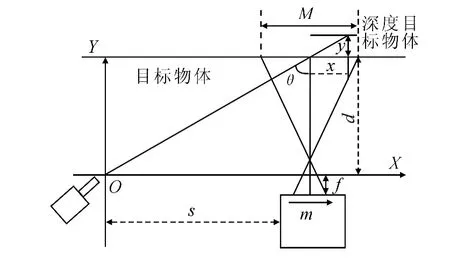
图2 目标障碍物深度信息获取原理图Fig.2 Schematic diagram of depth information acquisition on Target barrier
激光器打出的激光与目标物体的垂直面所成的角度为θ,因此在接收装置接收由物体反射回来的激光所得到的二维图像中利用三角法可求得物体反射点的三维信息,如实际深度y与两段激光线在X轴上的距离x的关系为x=y*tanθ.
2 多线激光法的算法模型与实现
如图3所示,多线激光投射法,以投射的I1,I2,…,Ii,…,IN等面构成整个激光曲面,用摄像机动态采集包含所有激光平面与物体平面交集的一幅图像.
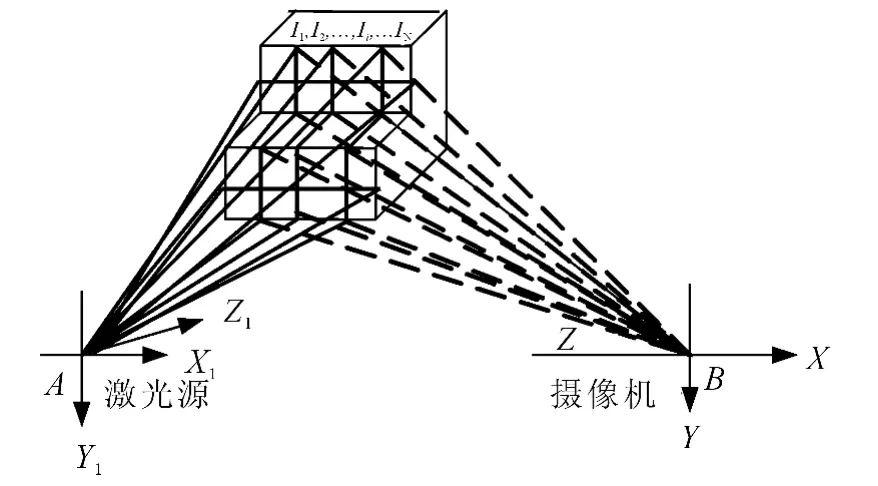
图3 多线激光探测方法模型Fig.3 The model of multi-line laser detection method
用多线激光投射算法得到的图像中的每一点的z=f(u,v)的u,v通过推导公式的计算得到它与三维空间中的点的x,y是线性关系,然后通过建立的多线激光法模型的公式计算出第i个点在图像中的像素值,最后将所有的点的方程式联立表达出整个物体表面.
多线激光投射法的实现,先将多线激光投射面其中的一个激光面抽取出来,并对其进行建模.如图4所示,一个激光装置投射与一台摄像机观察同一区域相同的障碍物,这时障碍物所在的区域就是一个三维世界,并且有自己的世界坐标系W.如果首先通过摄像机标定过程已经知道了摄像机在世界坐标系W中的位姿,以及摄像机的内部参数,如焦距.那么从多线激光探测模型中抽取的单个激光平面,他与目标障碍物相交形成的一个激光亮条上的任一点C,在三角形ABC中,角度β,γ及AB之间距离已知,故C点三维位置是唯一确定的,因此,每一条激光亮条上的每一个像素点的空间三维信息都可获得.
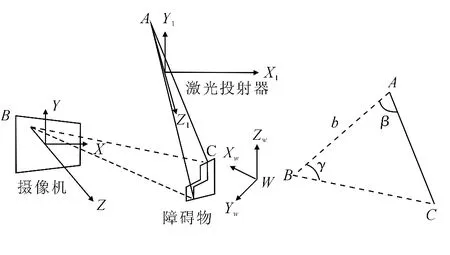
图4 抽取出的单个激光面探测原理Fig.4 Detection principle of an extracted single laser plane
假设激光源A与摄像机B的位置已经固定好,激光投射装置所在的坐标系X1Y1Z1轴与摄像机所在的坐标系XYZ轴平行,并且横坐标轴X1与X共线.将激光源A的投射中心作为坐标系X1Y1Z1的原点,摄像机B的光心作为坐标系XYZ轴的原点,这两个中心相差的距离定义为b.激光装置投射的竖光条与水平面垂直,投射的横光条与水平面保持平行.
激光平面与垂直面的交线与横轴X1的夹角定义为β,则此激光平面在坐标系X1Y1Z1下的方程为z1=tanβx1,而在坐标系XYZ下的方程为z=tanβ(x+b).假设物体表面亮条上C点的坐标是(x,y,z)T,他在图像中的像素坐标为(u,v).将B、C两点连接组成一条直线,则其方程为

其中fx,fy,u0,v0为相机参数.
联立摄像机坐标系下的激光平面方程与BC直线方程可得

根据多线激光投射法的数学模型式(2)可求取C点的三维信息.式中的β角可由图5所示的激光装置求得.点A是一个点光源,点激光束经柱面镜后变成线激光源,照射在一个平面镜上,经平面镜反射,在空间形成一激光平面,激光面与A点轴的夹角为α,平面镜垂直于A点的轴放置,β=2α,若平面镜每改变dα,则dβ=2dα.而α由激光装置定标确定.
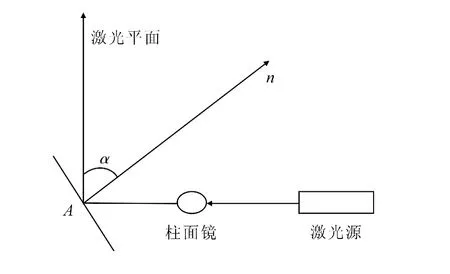
图5 激光投射装置Fig.5 Laser projecting apparatus
上述方法是抽取的单个激光平面,对于每一条曲线上的点,可用式(2)算出对应的三维坐标,将激光面与物体相交所形成曲线上的所有点恢复出其三维空间坐标,进行点云计算.
如图6所示激光线上不同位置的点,他与激光器所成的角度不同,与摄像机所成的角度也不同,分别设为β1,β2,…,βm,γ1,γ2,…,γm.但为了知道每一道激光束的夹角β,必须知道这条光束对应于多线激光面的第几条,若通过定标知道第一条激光束的投射角度β为β1,第m条为βm,则第i条的β为β2= (βm-β1)/m+β1.通过类似式(2)的求解计算出激光曲线上的所有点的三维坐标.并将所有对应这些点的坐标存在一个三维数组中,为了得到准确的相邻关系,减少数据冗余,将数据存在一个M×M的图像中.具体实现步骤为
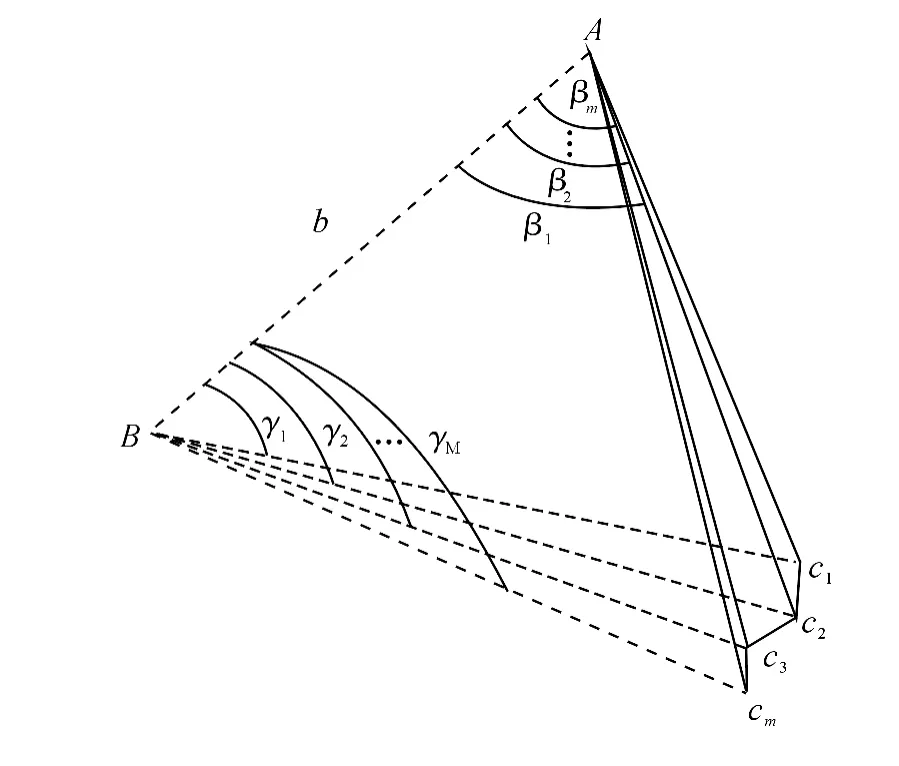
图6 激光曲线所有点的三维空间坐标计算Fig.6 Calculation of Three dimensional coordinates of all the points on the Laser curve
① 将所有点的三维坐标求出,设得到的点的总数为m.
② 求出所有点的X,Y坐标的最小值与最大值分别为xmin,xmax,ymin,ymax.
③ 设定M值,M的大小由曲线条数以及得到的数据的密集程度确定,通过以下的公式计算出第i个点在图像中的像素值.

④ 在图像内不是所有点(u,v)都能找到对应的点z,因为有许多的空点,一种情况是由于激光平面与障碍物相交时离散化产生,另一种情况是由背景产生.
⑤ 对于图像中由激光平面与障碍物相交时离散化产生的空点,用空点的n个最邻近点的Z值插值找出;由背景产生的空点,在图像中找对应点时,从两边和上下向图象中间搜索,将背景标识出来.
用多线探测的方法得到的图像中的每一点的z=f(u,v)的u,v通过式(3)得到它与三维空间中的点的x,y是线性关系,通过式(4)的参数形式可表达出整个物体表面.
其中C1,C2,x0,y0由式(3)求出.
3 实验结果
通过上述算法模型的设计,以激光线的弯曲程度可以计算出智能车前方是否存在障碍物,障碍物距离智能车的深度信息.仿真实验中安装在智能车上图像采集用的是工业CCD摄像机和DH-CG300图像采集卡,相机分辨率为640×480,采集卡每秒钟采集30帧图像,激光投射采用的是5mW的氦氖激光器,激光器的扩散角为3~4mrad.
在静态情况下对车距进行测量,实验环境是前方车辆静止不动,使用多线激光投射系统对前方静止的梯形障碍物进行测距,设定实际距离为1.5 m.将智能车上的激光装置以45°角倾斜投射到目标障碍物上,如图7所示.

图7 多线激光法障碍物探测实验场地Fig.7 The test site of obstacle detection based on multi-line laser
激光投射的光条呈平行光形状,光条间隔为1cm,条数为30.投射的平行激光在目标障碍物上形成多条激光光带,采用摄像机获取目标图像如图8(a)所示.由于采集到的激光光带图像一般为3~5个像素,测距时需要单像素的激光光条,故采用两步提取算法提取激光光条中心.首先,将包含多线光条的RGB图像转换到HSV颜色模型(HVE Saturation Value,HSV)如图8(b)所示,得到激光光条图像,根据阈值法与重心法相结合处理算法,最终分割后提取光条中心如图8(c)所示.最后对相机标定求取的相机的参数以及依据数学模型恢复出梯形障碍物表面的空间三维信息如图8(d).
为了验证算法的可行性及精度,对同一障碍物进行了移动,在距离智能车3个不同位置1m,3m,6m使用张正友标定算法计算出相机参数,用文中的算法进行测量,测定得到了距离值见表1.
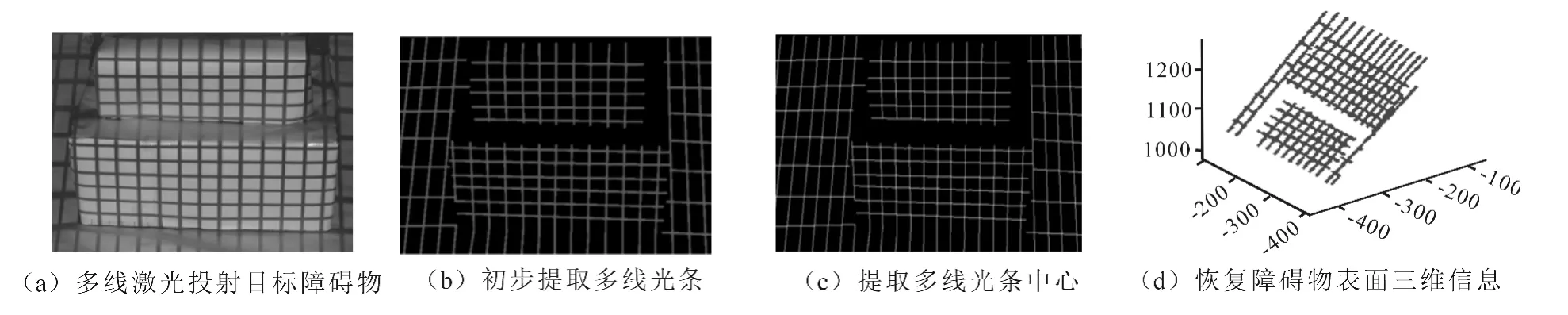
图8 多线激光法处理结果Fig.8 The processing results of multi line laser method

表1 三组实验数据Tab.1 Three sets of experimental data
通过对表1中数据的比较与分析,可以发现距离越远,误差相对较大.主要是系统本身的误差,摄像头的精度不够以及标定的不准确等.
4 结 论
文中提出一种多线激光投射的障碍物探测方案.通过建立数学模型,对摄像机进行动态标定,根据两步法获取障碍物表面的光条中心像素坐标,恢复出障碍物表面的三维信息,探测出障碍物距离智能车的距离.通过实验验证,本方案能够成功的探测到智能车前方的障碍物,并获得精确的距离信息.由于图像的边界,或者是物体与背景的连接处,也会造成激光光条的断开;如果激光面的一部分落在背景处,而背景离相机较远时,激光就会因亮度小因而在图像中消失;物体间的互相遮挡也可能引起激光光条的不连续,从而造成探测误差.
[1] 杨镇宇,黄席樾,沈志熙,等.一种新的智能车辆前方障碍物识别方法研究[J].计算机应用与软件,2010,27(7):17.YANG Zhen-yu,HUANG Xi-yue,SHEN Zhi-xi,et al.On New Intelligent Approach to Recognizing Obstacle Ahead Vehicles[J].Computer Applications and Software,2010,27(7):17.(in Chinese)
[2] 孙涵,任明武,唐振民,等.基于机器视觉的智能车辆导航综述[J].公路交通科技,2005,22(5):132.SUN Han,REN Ming-wu,TANG Zhen-min,et al.A Survey of Machine Vision Based Intelligent Vehicle Navigation[J].Journal of Highway and Transportation Research and Development,2005,22(5):132.(in Chinese)
[3] 张凤静,周建江,夏伟杰.基于双目立体视觉的汽车安全车距测量方法[J].智能系统学报,2011,6(1):79.ZHANG Feng-jing,ZHOU Jian-jiang,XIA Wei-jie.Research on Vehicle Security Spacing Measurements Based on Binocular Stereovision[J].CAAI Transactions on Intelligent Systems,2011,6(1):79.(in Chinese)
[4] 谭宝成,牟云霞,程智远,等.全自主移动机器人视觉系统图像分割方法研究[J].西安工业大学学报,2007,27(5):471.TAN Bao-cheng,MOU Yun-xia,CHENG Zhi-yuan,et al.Research on Image Segmentation on Vision System of Autonomous Mobile Robot [J].Journal of Xi’an Technological University,2007,27(5):471.(in Chinese)
[5] 胡凌山.移动机器人双目立体视觉技术研究[D].哈尔滨:哈尔滨工程大学,2005.HU Ling-shan.Research on Mobile Robot Binocular Stereo Vision[D].Harbin:Harbin Engineering University,2005.(in Chinese)
[6] 赵一兵,王荣本,李琳辉,等.基于激光雷达的无人驾驶车前方障碍物检测[J].交通与计算机,2007,25(2):9.ZHAO Yi-bing WANG Rong-ben LI Lin-hui,et al.Unmanned Ground Vehicles Obstacle Detection Based on Laser Sensor[J].Traffic and Computer,2007,25(2):9.(in Chinese)
[7] 肖雪,秦贵和,陈筠翰.基于光流的自主移动机器人避障系统[J].计算机工程,2013,39(10):305.XIAO Xue,QIN Gui-he,CHEN Yun-han.Autonomous Mobile Robot Obstacle Avoidance System Based on Optical Flow[J].Computer Engineering,2013,39(10):305.(in Chinese)
[8] STEYX B,LAURGEAU C,SAIESSE L,Set al.Fade a Vehicle Detection and Tracking System Featuring Monocular Color Vision and Data Fusion.[J].Symposium on Intelligent Vehicle,2002,9(8):845.
猜你喜欢
导航定位学报(2022年2期)2022-04-11
动漫界·幼教365(中班)(2020年3期)2020-04-20
铁道通信信号(2020年9期)2020-02-06
创新作文(1-2年级)(2019年4期)2019-10-15
中学生数理化·七年级数学人教版(2018年4期)2018-06-28
数学大世界(2018年1期)2018-04-12
中国公共安全(2017年11期)2017-02-06
办公自动化(2016年18期)2016-12-17
新闻前哨(2015年2期)2015-03-11
中国海洋大学学报(自然科学版)(2014年8期)2014-02-28