
交互式高速公路汽车防追尾系统
2015-01-01 02:01刘小武宜宾学院物理与电子工程学院四川宜宾644007
宜宾学院学报 2015年6期
刘小武(宜宾学院物理与电子工程学院,四川宜宾644007)
交互式高速公路汽车防追尾系统
刘小武
(宜宾学院物理与电子工程学院,四川宜宾644007)
针对目前汽车在高速公路行驶过程中的汽车追尾事故为高速公路主要交通事故这一特点,分析汽车制动过程,建立防追尾车速与安全车距计算模型,采用GPS定位紧急情况位置,无线数字通讯同步传递位置信息,周边车辆获取紧急情况位置信息后,由车载计算机处理并判断相对位置状况,采取适当的技术措施协助驾驶员及时避免追尾和因制动不及时的多车严重追尾.
GPS;无线通信;交通事故;汽车追尾
Liu XW.Interactive System of Avoiding VehiclesRear-End Collision on HighWay[J].Journal of Yibin University, 2015,15(6):39-44.
随着我国市场经济的发展,国民收入的稳步提高,公路基础设施的大量投入,高速公路总里程增加,人民生活不断富裕,私家车数量大幅增加,使得人们的出行变得方便、快捷、舒适,成为了现代文明与进步的标志.汽车给人们带来了诸多便捷,但道路交通事故的逐年上升,也使人们的生命财产安全不断受到侵害.
近年来,随着国家道路基础设施建设投入的加大,高速公路的里程长度不断增加.高速公路以其同向性、全封闭性、快捷性、舒适性以及燃油经济性等优点,深受驾驶员们的喜爱.然而,高速公路在方便人们出行的同时,也潜在着巨大的风险.高速公路交通事故逐年上升,带来了触目惊心的负面效应.据相关媒体统计,全国交通事故中,18%为追尾碰撞事故,而在高速公路事故中,追尾碰撞则占事故的36%~40%[1],为高速公路交通事故之首,造成了重大的经济损失和人员伤亡,高速公路汽车防追尾的研究迫在眉睫.
1 防追尾系统研究现状
汽车防碰撞系统研究始于20世纪60年代,80年代初,由德国奔驰公司发起了“普罗米修斯”计划,采用调频毫米波雷达FMCW(Frequency Modulation ContinuousWave)实现防撞报警,探测距离为150m.90年代,日本汽车业提出了ASV(Advanced Safety Vehicle)计划.丰田、尼桑、日立、三菱对毫米波雷达防撞技术作了大量研究.美国对雷达研究起步较晚,但目前防撞技术较为领先,能探测障碍距离达到106m.但由于误警率和成本价格问题,不能进行实际应用.
从各国研究的情况看,德国、日本、美国均采用主动式检测告警,检测手段主要采用以下三种:
第一种:激光式检测方式.激光波束具有方向性、相干性等特点,近似直线,扩散较少,因而可采用激光波束来扫描测试两车间距离.具体过程如下:将本车装备的激光雷达发射激光,照射前车反射镜,然后检测反射回波,计算出两车距离[2],根据两车距离变化,以及自身车速,综合判断采取相应措施(如告警、强行制动等)来阻止两车追尾事故的发生.
第二种:超声波收发器方式.通过后车前部发射超声波,检测扫描到的前车尾部反射回来的声波,计算得出两车距离[3],再根据自身车速情况,作出相应的操作指令,阻止两车相撞.
第三种:雷达检测方式.以雷达测速、测距为基础,实时探测前方障碍物体,根据情况自动刹车减速.通常,雷达为调频毫米波雷达(FMCW)或者脉冲雷达,而FMCW为近距离测速首选.
此三种方式均为回波检测方式,误警几率很高,特别是在弯道、中间隔离带等障碍物将激光反射回本车接收器时,将计算出干扰数据.有时甚至可能扫描到反方向通道车辆的车头(由于高速公路隔离带为百叶窗式),而不是本方向前车车尾,如按计算出错误数据进行制动作业,将导致一些不可估量的严重后果,如图1所示.

图1 传统位置检测干扰出现情况
从图1可以看出,在传统回波主动式检测中出现了误检.a1、a2、a3这三个检测回波中,只有a2才是正确信号,而a1、a3均为误检测信号.b1、b2、b3、b4中也只有b2才是正确检测信号,而a3、b4还是两车之间直接相互干扰信号,b1、b3为误测信号.
在高速行驶状态下,检测前方障碍,从提醒障碍到自动采取应急措施的短暂时间过程中,必须得到完全正确的检测结果,才能采取相应措施进行紧急制动响应,否则,如果由于自检过程中频繁误检车辆距离和障碍物而发出错误强行制动指令,则适得其反,将会给高速公路以及高速行驶车辆带来很大的安全隐患.
在以往的研究中,对前方障碍的检测判断,均局限于这种主动检测思维上,而就目前的实验来看,误警率高,同时成本也很高,不能被广泛应用推广.为提高检测结果以及确保操作指令完全正确,可采用被动式检测方式来完成,也就是在前车发现紧急情况时(指前车驾驶员发现异常紧急制动,ABS被激活情况下,此时该车之前肯定已经出现了异常情况,因为一般制动是不会触发ABS系统),利用卫星定位技术和数字通信技术,通过无线通信向无线信号覆盖范围内的车辆发送自身行驶综合状态参数信息(包括定位位置编码、车速、加速度、行驶方向等),在此无线覆盖范围内车辆获得该车综合状态参数后,与自身行驶参数进行比较,并测算出与前车位置距离、行驶方向是否一致等信息,然后作出相应措施,确保自身和前车不会出现追尾.即使用车辆位置定位+无线通信形式,来解决追尾问题,提高报警准确率,保障高速公路行驶车辆的安全.
2 GPS定位在系统中应用的可靠性分析
GPS(Global Positioning System,全球定位系统)缘于1958年美国军方的一个项目,主要目的是为陆海空三大领域提供实时、全天候和全球性的导航服务,经过20余年的研究实验,耗资300亿美元,由24颗卫星组成,全球覆盖率高达98%,属于RNSS无源定位体制,一般通过4颗以上卫星实现导航定位.对0A码测得的伪距称为UA码伪距,精度约为20m左右,对P码测得的伪距称为P码伪距,精度约为2m左右[4].
在高速定位情况下所得到的定位精度,由于时延问题,将可能带来定位滞后问题,而滞后将造成定位偏差增大;同时设备延时也将带来定位精度偏差问题,因而能否进行规定误差范围内的正确定位是影响系统可靠性的关键.
作为GPS采用的RNSS无源定位体制中,产生定位延时,造成定位误差的主要原因包括:(1)温度延时;(2)器件老化延时;(3)其他因素影响.
通过对国内多家单位研制的设备进行温度延变实验可知,温度从-20~20℃,设备延时最大为21 ns,从20~40℃,最大延时12 ns,可见,温度延时影响为纳秒级.同样,经过设备老化延时影响实验,对延时的影响也仅仅为纳秒级影响.在卫星导航用户设备延时测量中,还发现多普勒效应对设备延测量有影响,主要导致伪距测量不准确,但不影响设备时延的绝对值[5].
高速公路正常行驶设计速度通常为120 km/h,即33.3m/s,在超速情况下,一般不会超过200 km/h,即55.5m/s,而卫星设备温度、器件老化等延时对汽车定位影响均为纳秒级偏差,而1 s=109ns,可以忽略不计.
定位接收机可以每秒钟进行十次位置信息计算刷新,也就是在第一次定位后,要经过0.1 s重新定位一次,即便是在严重超速行驶(如200 km/h或55.5m/s)状态下,0.1 s的定位时间间隔使得定位误差不会超过6m.即使在卫星信号被云层掩盖,或者进入隧道不能捕捉到卫星时,也可以利用飞机航位推算技术,以前一时刻所获得的位置、航向、速度等参数为基本条件,把速度对时间进行积分,代入初始条件为前一时刻位置,即可精确得到现有位置.同时定位精度进行算法补偿,采用抗差最小二乘法[6]、神经网络、数据诊断与剔除[7]等方法来提高数据估计量的可靠性和有效性,将精度控制在2~5m范围以内,满足定位精度要求.
3 相邻两车不追尾临界条件分析
在实际的高速公路行驶中,后车和前车之间存在着一定的速度和距离关系:当前车出现故障或者紧急制动时,后车驾驶员要经过一定的反应延时才进行制动紧急处理,为此,系统在作出紧急制动时必须要与前车保持一定的距离,方可避免追尾事故的发生.
制动最短临界距离测算:设车子初速度为v,单位为km/h;车辆的最大减速度为a,单位m/s2;则制动可以分解为以下几个运动过程进行分别计算:
1)匀速运动过程
反应时间为t1(在一般条件下人的反应时间为0.1~0.5 s),制动响应过程时间为t2(液压刹车制动取值范围为0.2~0.9 s,气压刹车制动取值范围为0.3~0.9 s),此段时间均未进入实质性制动处理,所以该段位移为:

2)减速运动过程
减速运动过程分为减速增长过程(减速度由0增长到最大)和匀速减速过程.但减速增长过程很短,可以看作线性减速过程.
由于减速增长时间(t3)很短,通常可认为0.1 s,因而可简化得到此过程减速增长所行驶距离为:

在持续匀速减速过程中,由于最终速度为0,故:

由此可得到总的制动过程中行驶的位移[8]:

紧急制动运动过程位移分解如图2所示.

图2 紧急制动运动过程位移分解示意图
在两车同向行驶时,前方车辆在出现减速情况下,后车才发现.因而前车减速制动过程可简化为S3求解过程,由式(3)可得(前车速度为v2,最大减速度为a2):

后车的刹车距离由式(4)可得(后车速度为v1,最大减速度为a1):

两车制动不追尾最短安全距离为:

如图3所示.
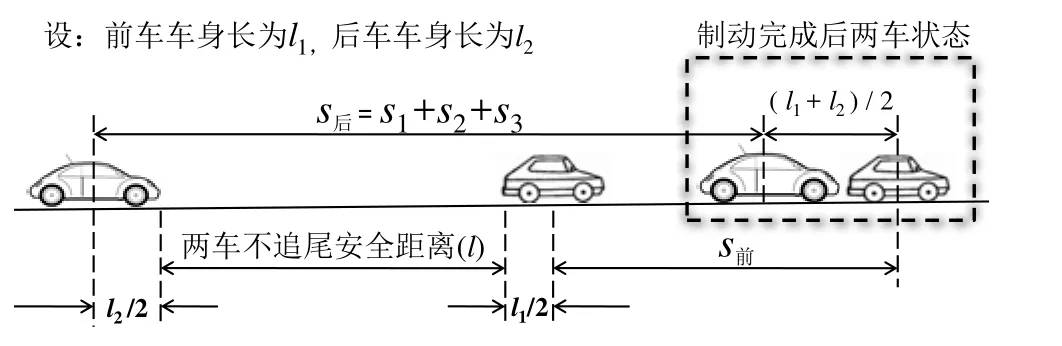
图3 两车不追尾位置示意图


由于车对地面压力N实质为车身重量,即N=mg,所以在汽车刹车抱死时,汽车急刹车最短行驶距离为:

由式(9)可以看出,汽车在抱死车轮刹车时,刹车距离与地面摩擦系数和刹车前速度有关,与车身重量无关.通常情况下,路面摩擦系数μ为0.8,雨天或者冰雪天气将可能降为0.2以下.在正常情况下,通过式(9),计算出不同速度下的紧急刹车S3距离的关系,如表1所示.再根据式(5),可将表1所得数据视为前车刹车距离.
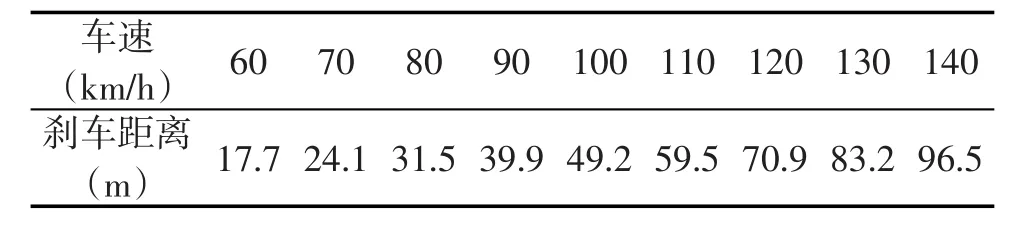
表1 前车车速与刹车距离对应表
后车的紧急制动是在看到前车减速后,才进行制动,因而这个滞后刹车过程包含了两个因素,人的反应滞后和制动系统响应滞后.如3.1所述,人的反应时间为0.1~0.5 s,而液压刹车响应时间为0.2~0.9 s,两项(t1+t2)反应取其中间值共需0.7 s,减速增长时间(t3)很短,通常可认为0.1 s.考虑一些其它因素导致影响总体响应时间,将反应时间延长为1 s,由式(6)、(9)得:
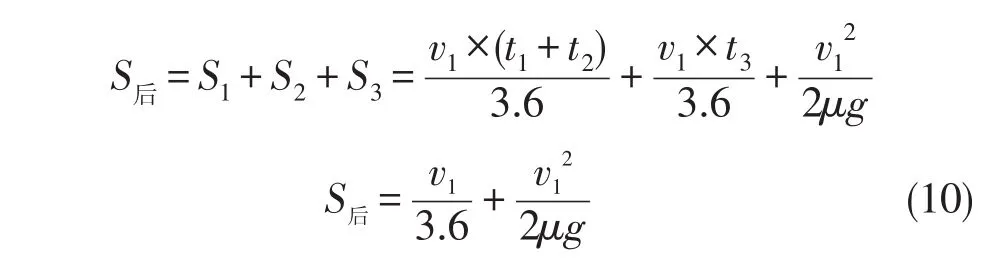
式(10)代入参数得后车车速与刹车距离对应情况,如表2所示.

表2 后车车速与刹车距离对应表
由表2数据分析,可以得出以下结论:当车速在120 km/h的情况下,后车的刹车距离至少需要104.2m.而前车可能有多种情况(静止、低速、高速)出现,在同时满足三种情况的最短前后车距应为104.2m,即便前车静止,后车也能避免追尾.即表2中的刹车距离也就是前后两车需要保持的安全距离.前后两车制动距离与初速度关系仿真曲线如图4所示.

图4 前后两车初速度与制动位移关系
4 防追尾安全系统模型
要彻底解决高速公路追尾问题,系统设计应兼顾两点:第一是保证系统检测可靠正确;第二是要保证足够的制动距离,确保制动停车后不会出现追尾事故.
在传统的主动式检测中,存在很多问题,图1中已经显示出了主动式检测的弊端,误警率很高,这会给高速公路交通带来不安全的隐患.
采用被动式检测方式可彻底解决误警问题.第一发现异常情况车辆,在其自身紧急制动的同时,将自己的行驶环境信息(包括行驶方向、速度、加速度、经纬度等)进行广播告警,告诉广播覆盖范围内的其他车辆,其他车辆在收到告警信息后,与自身行驶环境信息进行比较,同时计算当前位置与告警广播车辆位置距离变换情况,并根据计算结果变化情况和路面情况采取不同应急制动处理措施,提醒、协助驾驶员避免追尾事故发生.车辆的行驶方向、速度、加速度、经纬度、路面情况等行驶环境信息,可通过各自的GPS定位系统和传感器获得.而对于是否是紧急情况的认定,可以通过车轮是否抱死,即ABS信号来认定,因为在发现紧急情况驾驶员的第一反应就是一脚将刹车踩死,导致车轮抱死,ABS触发,而普通的减速是不会抱死车轮和触发ABS系统.
发现紧急情况车辆,在第一时间(也就是车轮抱死,ABS被触发时)将自己行驶环境信息(位置经纬度、行驶方向等)向外广播紧急告警SOS,在广播覆盖区域内,收到SOS信息正常行驶的车辆通过与自身行驶的环境信息对比,计算自己与发出紧急信号车辆的行驶方向是否一致,以及距离紧急车辆位置变化的情况,并根据计算结果确认是否采取告警或者强制制动措施来协助驾驶员安全行驶避免紧急现场.当两车矢量方向夹角小于±90°,两车距离未达到制动极限距离时,语音提示驾驶员减速行驶,当到达安全距离极限时,语音报警并采取制动措施,调整车速至安全范围,保持安全车距,避免追尾发生.如果两车矢量方向夹角大于±90°,则不采取任何紧急措施.系统工作原理模型如图5所示.
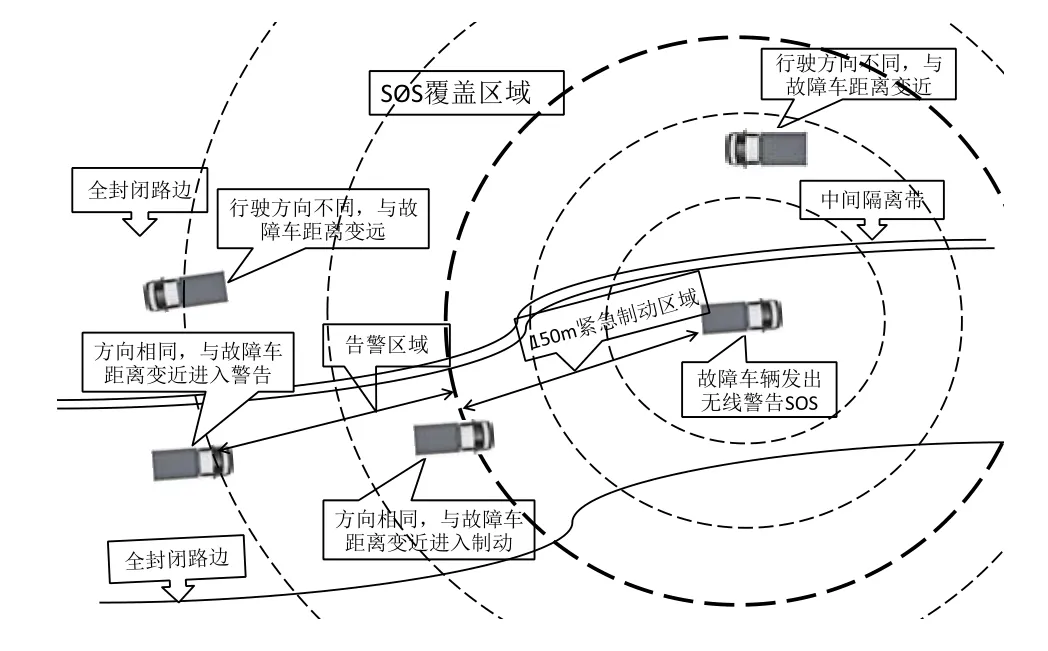
图5 系统工作原理模型图
综上所述,完整系统应包含两个模块,即数字发射模块和接收模块.正常情况下,所有发射模块处于静默状态,在ABS被触发情况下(正常刹车是不会被触发),立即恢复工作状态.而接收模块一直处于工作查询信号状态,其工作模型如图6所示.

图6 系统工作模型
5 系统工作流程
在高速公路正常行驶的车辆,规定最高车速不超过120 km/h,如表2的计算结果,前后两车极限安全距离不应低于104.2m,但考虑到后续车辆在获得定位信息以及系统计算、机械响应时延等问题,将系统安全车距临界点调整为150m,150m以外为系统告警提示区域,系统告警信息无线覆盖半径为300~400m.前车在紧急情况下触发ABS的同时,立即发出SOS告警信息,将该车行驶的环境信息(行驶方向、当前GPS经纬度等)循环同步更新发送.进入SOS信号覆盖区域的车辆收到该信息后,与自身行驶环境参数进行循环比较和计算,当与告警车辆在其行驶方向方位夹角±90°夹角之间,表明行驶方向一致,立刻通过两车经纬度位置信息计算两车之间的直线距离,当距离变短,并尚未达到150m安全极限范围,进行语言提示告警处理,当计算距离进入150m范围以内,立即启动制动,协助驾驶员进行减速操作至安全车速,避免追尾.具体工作流程如图7、图8所示(注:图中SOS信号包括方向、经纬度、速度等行驶信息).
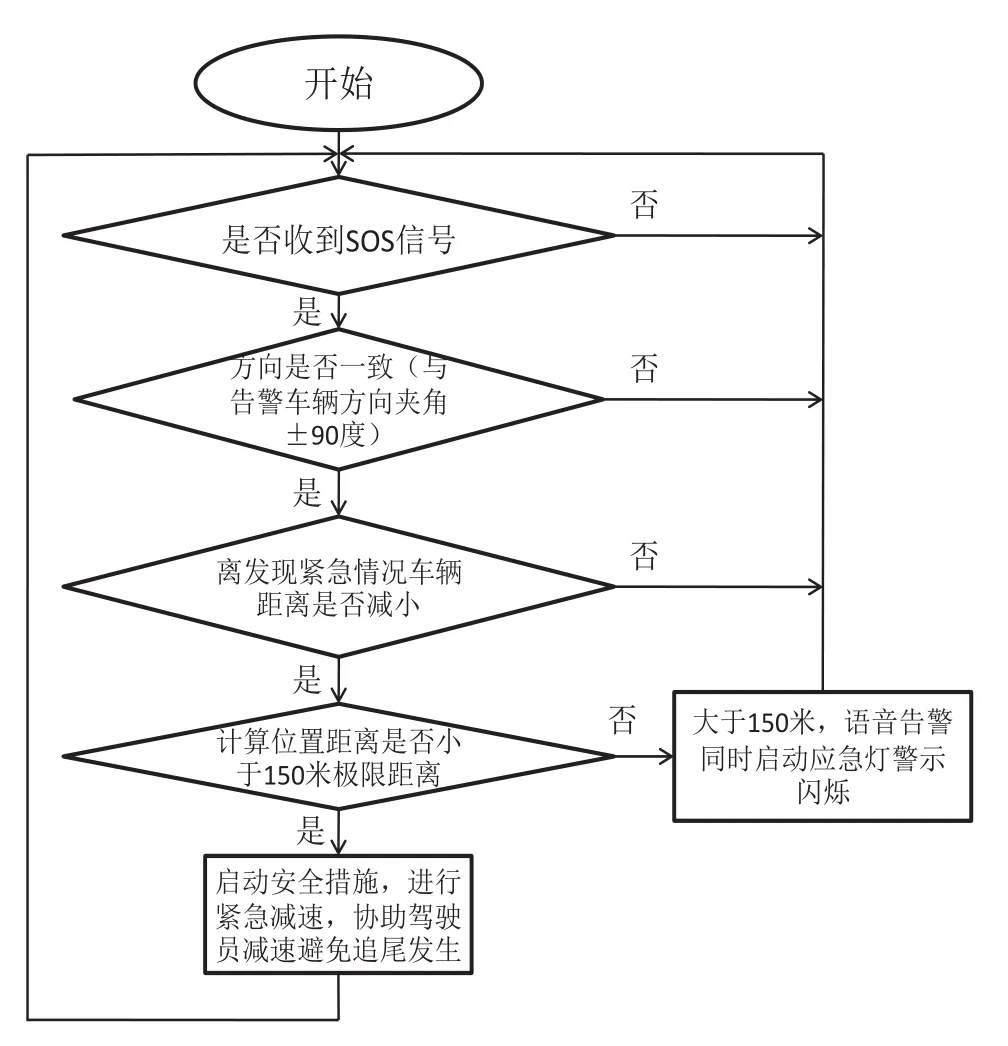
图8 系统无线接收端工作流程
6 结语
通过防追尾系统广播第一发现紧急情况车辆的行驶环境参数,后续车辆收到SOS信息后,计算自身与故障车辆行驶方向是否同向,以及距离变换情况,采取相应的紧急措施,能及时地减少高速公路中追尾事故的发生,防止高速公路中交通事故的扩大,更大程度地降低损失,减少人员伤亡.本系统可以加装人工告警开关,对自身出现故障停靠在高速公路边的车辆和人员起到安全保护作用.
[1]吴海波,石磊磊.汽车防追尾预警及自动减速系统设计[J].北京汽车,2012(2):38-40.
[2]岳昕,康文,李会,等.高速公路汽车追尾事故智能预测系统研究[J].森林工程,2005,21(3):26-28.
[3]吴新烨,葛晓宏,黄红武.高速公路汽车追尾安全行驶研究[J].厦门大学学报(自然科学版),2009,48(3):373-376.
[4]Kaplan ED,Hegarty C.GPS测量原理与应用[M].第二版.寇艳红译.北京:电子工业出版社,2012.
[5]王礼亮,王淑芳.影响卫星导航定位系统设备延时的主要因素[J].Radio Engineering,2005,35(8):6-8.
[6]周江文,黄幼才,杨元喜,等.抗差最小二乘法[M].武汉:华中理工大学出版社,1997.
[7]韦博成.回归诊断问题中诊断模型研究[J].数理统计与应用概率,1993,8(2):62-69.
[8]孔金生,郭非,王希萍.基于安全距离模型的汽车防追尾避撞方法[J].微计算机信息,2008,24(11-2):251-252.
(编校:李青)
Interactive System of Avoiding Vehicles Rear-End Collision on High W ay
LIUXiaowu
(SchoolofPhysicsand Electronic Engineering,Yibin University,Yibin,Sichuan 644007,China)
Given the fact that accidents on the highway aremainly caused by rear-end collision,a computation model which could work out the safety speed and distance for rear-end collision prevention based on the analysisof the braking processwasestablished.The location ofa vehicle is positioned by GPS,and this information is synchronized wirelessly to othersaround at the same time.The on-board computer ofnearby vehicles process the data and help the driveravoid col⁃lision by braking in time.
GPS;wirelessdigital communication;traffic accident;rear-end collision
U463.66
A
1671-5365(2015)06-0039-06
2014-11-22修回:2015-01-15
刘小武(1971-),男,讲师,本科,研究方向为计算机网络与通信
网络出版时间:2015-01-15 17:09网络出版地址:http://www.cnki.net/kcms/detail/51.1630.Z.20150115.1709.003.html
引用格式:刘小武.交互式高速公路汽车防追尾系统[J].宜宾学院学报,2015,15(6):39-44.
猜你喜欢
自动化仪表(2020年10期)2020-11-13
电子制作(2019年14期)2019-08-20
小学阅读指南·低年级版(2017年11期)2017-12-06
中国交通信息化(2016年9期)2016-06-06
科普童话·百科探秘(2015年6期)2015-10-13
伴侣(2015年5期)2015-09-10
大众科学(2015年10期)2015-09-10
对联(2015年22期)2015-06-11
中国自行车·骑行风尚(2014年2期)2014-05-07
小说月刊(2014年4期)2014-04-23
