
地面PD雷达信号处理设计与实现
2014-12-31 11:48孟凡利赵婵娟
上海航天 2014年4期
孟凡利,周 全,赵婵娟
(上海航天电子技术研究所,上海 201109)
0 引言
地面探测制导雷达一般采用低脉冲重复频率,但对低空飞行目标及小目标的检测效果并不理想,低空突防的巡航导弹已成为最大的威胁。巡航导弹目标雷达截面积小、飞行高度低,雷达探测时常受到强地(海)杂波等强无源干扰,这就要求信号处理的杂波改善因子大于60dB,传统动目标显示/检测(MTI/MTD)已难以实现,需采用杂波抑制性能更高的中高重频PD信号处理[1]。PD雷达信号处理包括脉冲压缩(PC)、多普勒滤波(FFT)、恒虚警检测(CFAR)和距离解模糊等功能模块,其中脉冲压缩、恒虚警检测等功能模块与常规体制的低重频雷达相同。距离模糊和距离遮挡是PD雷达中高重频模式产生的新问题,是PD雷达信号处理的难点。距离解模糊的性能取决于解模糊算法;距离遮挡问题可由多个脉冲重复周期参差解决。前人研究主要集中于PD雷达中解模糊等算法的理论和原理,对工程化实现较少论及。本文基于ADSP-TS201S信号处理器平台,对PD雷达信号处理机的设计与实现进行了研究。
1 PD雷达信号处理机设计方案
1.1 系统要求
PD雷达信号处理机要求兼容低重频波形的NR,MTI,MTD工作模式,增加PD工作模式下的搜索和跟踪两种任务波形,以20ms为1个调度周期进行处理,其中可包括多个任务波形。要求在无目标指引时能自行搜索检测到目标,并给出目标距离、速度、角度信息,在对目标进行跟踪时,可精确测量目标信息。可检测目标速度范围40~1 000ms/s,量程40km。为减小杂波重叠对信杂比的影响采用中重频,减小近地强反射功率的影响,在发射脉冲后还应额外增加接收机关闭时间3~5μs。
1.2 原理
PD雷达信号处理机的主要作用是从中频接收机接收雷达的回波数据,从噪声和杂波中提取出有用目标,测量目标的距离、速度、方位、俯仰等信息。PD雷达信号处理机主要由FPGA接口板、DSP信号处理板和Vxworks管理机等组成,其总体功能框图如图1所示。

图1 信号处理机功能Fig.1 Functional scheme of signal process
FPGA接口板通过CAN接口与调度器通信,通信周期(即1个调度周期)为20ms,以获取本调度周期的波位信息。同时它通过光纤接口与接收机通信,接收和差差三通道及辅助通道的5M数据率的回波数字信号及系统时序信号进行预处理(包括周期分割、数据缓存、旁瓣消隐及旁瓣相消处理、计算增益控制量),处理结果通过LINK口以乒乓方式打包给多块DSP信号处理板。
DSP信号处理板采用两块并行乒乓处理,也可加入冗余处理板。DSP信号处理板完成PD信号处理和低重频信号处理的所有处理过程,最终产生目标的点迹信息并发中断给Vxworks管理机。
Vxworks管理机在收到中断后通过CPCI总线取出目标点迹信息,通过广播方式发送至数据处理机和显示控制计算机。Vxworks管理机还具有DSP程序加载与管理、系统调试、冗余控制等功能。
PD雷达信号处理主要执行搜索、跟踪任务,处理过程包括进行PC,FFT,CFAR和距离解模糊等系列处理,PD信号处理原理如图2所示。各模块原理如下。
a)频域脉冲压缩 线性调频信号对多普勒频移不敏感,且较易获得大的压缩比,应用广泛。其数字脉压实现有时域匹配滤波法和频域相关法两种。由于时域匹配滤波阶数过高,采用频域相关法较有利。频域相关法的主要过程是先对回波数据进行FFT处理,乘以匹配系数后再进行逆FFT处理。

图2 PD信号处理原理Fig.2 Scheme of PD signal process
b)距离重排 实现距离门重排的二维存储器及读入和读出顺序如图3所示。距离重排的作用是将连续的参差脉冲重复频率(PRT)内不同距离单元的数据按序读入,以不同的PRT为行组成一个二维矩阵,故该矩阵横轴表示不同的距离单元,纵轴表示不同的PRT。为便于进行FFT滤波处理,需对二维矩阵先行转置处理,再按先后次序对每个PRT中的相同距离单元中的数据作FFT滤波,之后为进一步的CFAR处理,还需对由滤波输出数据构成的二维矩阵作1次转置。

图3 存储器结构Fig.3 Scheme of memory
c)多普勒滤波(FFT+FIR) 对固定平台的PD雷达来说,若杂波和目标折叠至某一重频下相同的视在距离上,则需采用足够高的重频在频率域内形成无杂波区,同时利用对多普勒敏感的窄带滤波器组实现频谱分离,提取出所需运动目标的谱线,将其他干扰杂波全部滤掉。这样不仅提高了灵敏度和速度分辨力,而且还改善了信杂比。因FFT滤波器形状固定,不能在低速频率附近和最大检测频率附近兼顾既能滤除杂波又能检测具有相应速度的目标的要求,故为检测低速及高速目标,需单独设计FIR滤波器。
d)时域恒虚警(GO-CFAR) 为减小多普勒滤波杂波剩余的影响,同时避免后续处理设备的饱和,采用自适应门限处理的相邻单元平均选大恒虚警处理。参考单元选取时采用被检测位置前后隔开3个距离单元外的各8个距离单元。为减少后端数据处理面临的虚警量,同时减少信号处理机的运算量以节省处理时间,在跟踪时不再对全部的视在距离单元均作CFAR处理,而只需对由目标估计位置换算成的视在距离单元前后的有限个距离单元作CFAR处理即可。
e)频道选大 相同重复周期的一组脉冲回波经恒虚警后,在各FFT及FIR滤波通道间对各被检测距离单元进行通道选大处理(由于硬件资源限制未采用时域和频域联合恒虚警),同时利用选出的最大幅值所在的通道号进行频道-速度换算,完成对目标的测速处理,再对不同重复周期的多组脉冲进行3/8准则的二次门限处理,确定有目标出现的距离单元[2]。
f)解距离速度模糊 当脉冲多普勒雷达处于中重频模式工作时,一方面会受距离盲区遮挡的影响,另一方面,由于重复周期明显小于电磁波探测雷达量程远端所需的时间,会产生距离模糊;同时由于重复频率小于目标最高多普勒频率,会产生速度模糊。为消除距离模糊和距离遮挡,采取八重频组变PRT工作模式。对选定的PRT组合,一般可采用孙子定理法(余数法)、纠错数法、经典查表法和一维集法解距离模糊[3-4]。解速度模糊原理与解距离模糊类似。
g)和差归一化处理 利用单脉冲测角原理,保留三通道FFT或FIR滤波后的相应距离单元的滤波输出数据,结合频道选大步骤中二次门限处理后获得的目标距离单元和对应的通道号,然后选择和差差三路中同频道同视在距离单元的数据进行归一化处理,根据由天线特性决定的测角斜率,提取目标的方位角和俯仰角信息。
1.3 设计实现
PD信号处理的波形设计分为搜索任务波形和跟踪任务波形。先用搜索任务搜索目标,依靠多重频解模糊得出目标的距离和速度信息,有目标信息后再选用合适的单重频跟踪任务进行精确跟踪。
本雷达系统在执行搜索任务时采用八重频,重复周期为[23,24,25,26,27,28,29,30]μs,联合3/8准则就可解距离和速度模糊,距离模糊如图4(a)所示。由图可知:40km内有3个重频可检测到目标;每个重频发射32个脉冲进行相参处理,用FFT(加kaiser窗)和单独设计FIR滤波器综合的滤波方法,频域响应如图4(b)所示,零点处深度62dB。因采用中重频,距离和速度均模糊,在目标检测过程中应综合考虑距离摭挡和频域响应。PD搜索模式下的检测性能如图5所示。图中:1个距离单元代表30m;深色区域表示对应的距离和速度下,频响小于-5dB即不能检测区域。实际应用中,为进一步增加频域检测能力,可利用频率捷变技术,采用8个递减频点对应8个重复频率,同时可增加抗干扰能力[5]。

图4 PD搜索结果Fig.4 Results of PD searching
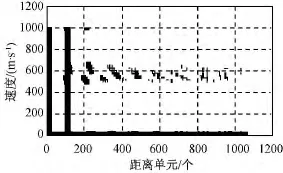
图5 PD搜索下综合检测性能Fig.5 Detecting performance of PD searching
本系统跟踪任务时采用单重频,重复周期为搜索任务八重频中的一个,由搜索截获的目标距离和速度选择,选取准则见表1。为同时满足速度与距离要求,速度和距离均是在要求范围内越中间越好。为保证跟踪精度,多普勒滤波器组中的每个滤波器应尽可能与信号带宽匹配,每种PRF发脉冲128个,以达到准匹配效果。
PD雷达信号处理的DSP软件实现原理如图6所示。和差差三通道数据经接口板预处理后通过LINK口送至搜索处理板的DSP2,DSP1,DSP6中,此三片DSP程序基本一致,主要完成回波数据的FIFO缓冲及控制,并进行三通道幅相一致性控制及数据存储功能,然后再通过LINK口继续下传数据。
DSP3,DSP0,DSP5程序基本一致,主要完成回波数据的频域脉压,再将脉压结果进行数据重排成多普勒滤波的格式,最后通过LINK口继续下传数据。某重频的32个脉压结果如图7(a)所示。
DSP4通过LINK口接收方位差通道、俯仰差通道脉压后的重排数据,进行多普勒滤波处理,包括低频通道的FIR滤波处理和其他通道的FFT滤波处理。多普勒滤波后的数据通过乒乓存入SDRAM,用于和差归一化处理。FFT+FIR滤波结果如图7(b)所示。由图可知:目标在第22个通道中,其中前3个和后2个通道中包含地杂波,不参与后续处理。
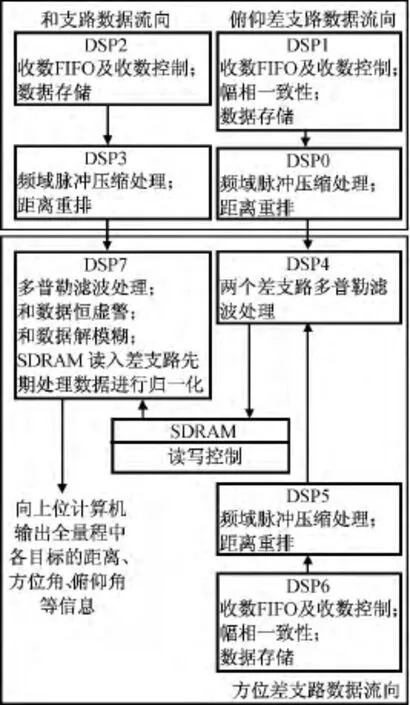
图6 PD雷达信号处理硬件实现原理Fig.6 Principle of PD signal process
DSP7通过LINK口接收和通道脉压后的重排数据,经频域多普勒滤波处理、时域恒虚警后进行解模糊处理,8个重频恒虚警结果如图7(c)所示。由图可知:由于距离摭挡影响仅有5个重频检测到目标。用本文提出的优化解模糊算法后可得一显示各不模糊距离单元出现目标可能性的表格,据此按3/8准则得到目标距离信息如图7(d)所示,目标距离为675个距离单元。之后再读取SDRAM中两个差通道存入的多普勒滤波数据进行和差归一化处理得到目标角度信息,综合形成目标点迹信息送至上位机,最终送数据处理和显控。

表1 跟踪波形及选取范围Tab.1 Selecting scope of tracking wave

图7 PD信号处理过程Fig.7 Procedures of PD signal processing
2 关键技术及解决方法
为提高检测性能,PD雷达采用中高脉冲重复频率(PRF)信号,以便在信号频率域形成足够宽的无杂波区[6]。当脉冲重复频率很高时,对应一个发射脉冲产生的回波可能需经数个重复周期后才能收到。由于目标回波的延迟大于脉冲重复周期,使收发脉冲的对应关系发生混乱,同一目标读数(视在距离单元)可能对应数个目标真实距离(真实距离单元),这样就造成了测距模糊。
对中高重频工作模式,不仅测量距离是模糊的,而且回波可能被发射脉冲遮挡。遮挡的距离部分即是发射脉冲的宽度,取决于脉冲重复周期和占空比。为保证目标不因遮挡而丢失,应采用多个脉冲重复周期,使遮挡的距离单元错开,以便无论距离是多少,至少用其中几种脉冲重复周期在m/n准则下能检测到目标。
2.1 优化的解模糊算法设计
解模糊是PD雷达的一项关键技术,采用合理而快速的算法对保证目标的检测概率和降低虚警率有重要意义。为消除模糊,雷达系统采用脉组参差,并获得了一组相关测量值,然后根据这组测量值解算目标的真实距离。现有解模糊方法中最具代表性的方法是孙子定理。解模糊过程的本质是在求解同余方程组,孙子定理可用于解决该问题。基于孙子定理的中国余数定理法解模糊是一种根据以不同的测得的距离计算不模糊距离的解析方法。但这两种方法运算量大且存在边界误差(由于目标出现在距离单元边界附近带来的误差)。
本文基于孙子定理和余数定理提出了一种新的优化查表法。设重复周期数为n,量程距离单元数为d,构造一初值为零的d×n数组真值表,取值为0代表某重复周期的当前距离单元无目标,取值为1代表可能有目标。将当前重复周期中所有可能的位置填进表中,再通过矢量运算将n行数据相加,并根据m/n检测准则,若在某个距离单元上数值大于m,则当前距离单元即为目标的真实位置。这种查表法既可解距离模糊又能解速度模糊。以解距离模糊为例,若有n种重复周期进行距离测量,其距离单元数为R1,…,Rn,目标对应的各视在距离单元为r1,…,rn。若测量无误差,则目标所在的真实距离单元

式中:K1,…,Kn为目标点对应的各重复周期的模糊度。
实际上,解模糊的过程就是确定模糊度的过程。若采用m/n检测准则,则当所建表格中的各重复频率距离单元有m个与视在距离单元相同时即可确定其模糊度,然后再根据式(1)推算出真实距离。实际工作中,由于目标闪烁或AD采集偏差等原因,相同目标的回波脉压位置可能会左右偏差1个距离单元,故在填写真值表时,应将偏差的目标距离也加入真值表进行解模糊处理。
2.2 距离遮挡问题及脉冲重复周期最优化选择
发射脉冲有一定的宽度,当目标回波落在发射脉冲内将导致信号的丢失,此即距离遮挡。雷达采用脉冲压缩方式工作时,脉冲宽度的增加使距离遮挡变得严重。现今雷达对威力的要求越来越高,故多采用脉冲压缩方式,致使距离遮挡在PD雷达中无法避免。解决方法是选取合适的PRF和检测准则。
脉冲重复频率的选择原则有两个:一是要在雷达威力范围内,在m/n准则下保证每个不模糊距离单元对应的M种重复周期不存在多值性,即一一映射;二是要尽可能使各不模糊距离单元对应的N个PRT视在距离单元中有N-1个落在发射脉冲(即距离遮挡)之外。对满足上述要求的重复周期组合统计检测概率,在脉冲宽度允许条件下选择最大的检测概率[7]。
3 关键技术实现
3.1 解距离模糊算法
对飞机、导弹等高速目标在解模糊过程中常需要发射多种重复周期的脉冲,并需确定检测准则。本文先建立解距离模糊表格,再根据该表格在雷达威力范围内进行全程搜索,该方法运算时间开销与各PRT内过门限的目标点数无关,其流程如图8所示。
设检测采用m/n准则,雷达威力距离40km,距离单元宽度30m,雷达威力对应的距离单元数为1 333,雷达威力范围内最大距离模糊度为K。取典型值,m=3,n=8,K=12。先在雷达威力范围内按不模糊距离单元由小到大的顺序建立表格,表格内容为根据中国余数定理算出的所有不模糊距离单元对应的各PRT的视在距离单元号。
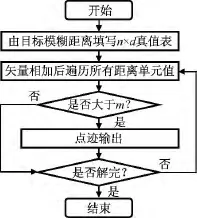
图8 解距离模糊流程Fig.8 Flowchart of solving range ambiguity
完成直值表后通过矢量和相加,再遍历所有距离单元,在1 000距离单元处值为6满足3/8准则,则确认该单元有目标存在。在一片ADSPTS201芯片中用该法搜索,对1个波束内1 333单元的距离解模糊,若每个距离单元的解模糊需指令10条,每条指令的时间为2ns,则所需总运算时间为1 333×10×2ns=27μs。该时间相对固定,不随目标点多少而变。由上可见,本文算法的运算时间开销和程序的简捷性有其优势。
3.2 距离遮挡问题及脉冲重复周期最优化选择
脉冲重复周期的确定是个循环反复的试验过程。理论上为解决距离摭挡问题,重复周期参差比最大越好,占空比越小越好。但因受系统威力限制,占空比通常在一个较小的范围内,重复周期也缩小到一定范围内,然后再通过遍历的方法画出类似图1的距离模糊图和类似图2的综合检测性能图,选择相对性能较好的一组重复周期。
4 结束语
本文介绍了PD雷达信号处理基于DSP平台的实现。讨论了雷达解距离模糊的原理,算法和遮挡问题,分析了各种算法的运算能力,提出了建议使用的算法。该算法已用于某地面PD雷达的信号处理系统中,并成功完成信标跟飞和民航机跟飞试验,其运算能力达到雷达波束实时处理的要求,工作稳定性能优越,具有工程应用价值。
[1] 雷火明.地面中重频PD雷达控测巡航导弹性能分析[J].舰船电子工程,2010,30(2):107-110.
[2] 刘 辉.PD体制地面情报雷达相关问题研究[J].火力与指挥控制,2009,34(9):122-125.
[3] 王佳苗.一种脉冲多普勒雷达解距离模糊新算法[J].雷达与对抗,2005(3):38-41.
[4] 张代忠.脉冲多普勒雷达中的解模糊算法及实现[J].雷达科学与技术,2004,2(5):292-297.
[5] 张建华.PD雷达接收机及信号处理系统仿真研究[D].成都:电子科技大学,2006.
[6] 韦 伟.脉冲多普勒雷达信号处理关键技术研究[D].南京:南京理工大学,2004.
[7] 李东海,张兴华.PD雷达脉冲重复间隔最优化选择[J].现代电子技术,2009,32(21):35-39.
猜你喜欢
——信号处理
无线电工程(2022年10期)2022-10-24
中国临床医学影像杂志(2022年5期)2022-07-26
科学与信息化(2021年30期)2021-12-24
北京航空航天大学学报(2021年9期)2021-11-02
雷达与对抗(2020年2期)2020-12-25
火控雷达技术(2020年2期)2020-10-16
雷达与对抗(2020年1期)2020-06-05
医学新知(2019年4期)2020-01-02
电子制作(2019年14期)2019-08-20
电子制作(2018年17期)2018-09-28
