电动汽车IPMSM驱动控制技术
2014-12-28 06:15薛梦觉康劲松魏俊天朱日升
电源学报 2014年1期
薛梦觉,康劲松,魏俊天,朱日升
(同济大学 电子与信息工程学院,上海201804)
引言
面对严重的环境污染和紧迫的石油资源危机问题,电动汽车在近些年得到大力发展。内嵌式永磁同步电机(IPMSM)转动惯量小、功率密度高、广泛应用于电动汽车驱动系统中[1]。为增加驱动平稳性,目前车用IPMSM主要采用矢量控制算法和空间脉宽调制(SVPWM)技术进行高性能调控,以降低转矩和电流脉动,提高直流母线电压的利用率。
与工业电机控制芯片相比,汽车级控制芯片需要满足更高的安全性和可靠性要求,根据工控领域国际标准IEC61508延伸至车辆的电机与电子系统安全标准ISO26262,在此提出一种以Infineon TC1797 DSP作为主控芯片、采用模糊控制和参数识别对矢量控制进行优化的IPMSM控制系统,以满足电动汽车驱动系统高性能安全调速需求。
1 IPMSM矢量控制
通过转子磁场定向的方法变换得到永磁同步电机在d、q坐标系下电磁转矩方程为:

式中:id和 iq分别为 d、q轴的电流;Ld和 Lq分别为交直轴的电感;ψf为永磁体磁链;Pn为电机极对数;Te为电磁转矩。由公式(1)可以看出电磁转矩方程包括两部分:由转子永磁体所产生的磁场与定子气隙磁场相互作用产生的永磁转矩和凸极效应所产生磁阻转矩。
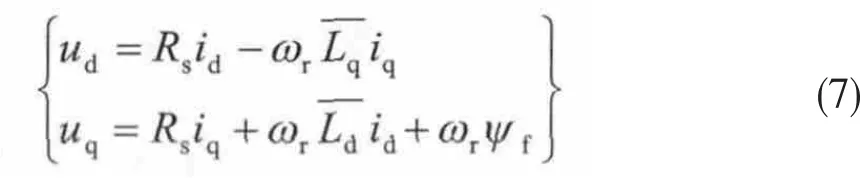
在稳态情况下电压方程可以表示为

ud和uq分别为d、q轴的电压,Rs为定子电阻,ωr为电机旋转速度[2]。当电机高速运动时,电压方程中电阻压降可以忽略不计,则定子电压矢量幅值us约为

随着转速上升,定子电压幅值不断增加,到达一定速度时逆变器达到最大输出电压,要继续升高转速则只能靠调节id、iq来实现。这个速度称为转折速度[3]。在转折速度以下,电动汽车一般在恒转矩区运行,为增加续航减少损耗,运行在给定转矩对应的最小定子电流工作点上,即最大转矩电流比(MTPA)控制;转折速度以上则通过反向增加d轴电流id削弱气隙磁场提升速度,达到弱磁升速的效果[4]。
IPMSM的矢量控制效果由控制算法决定,控制参数的设置和运行工况的辨识对电机响应的精确程度和跟随能力有很大影响。在此提出一种控制环节优化方案,使用模糊控制器对PI进行优化,增强其调节跟随能力,并通过电机参数辨识增加MTPA控制精确性,从而提高电动汽车驱动系统的控制性能。
2 PI控制器模糊优化
在矢量控制算法中,采用速度和转矩双闭环调节,其给定量与运行值的偏差经由PI控制器得到电压控制矢量,以SVPWM算法控制IGBT开关,从而达到高性能电机控制的效果。其中PI控制器起到非常重要的作用,PI参数的好坏也直接影响到系统的响应速度、跟随能力和稳定性能。
传统的PI控制器通过系统的标定、运行以及反馈,得到一个综合效果较好的固定数值作为控制算法参数。在电机运行一定范围内,其控制效果良好,而超出最佳控制区域时其控制跟随效果会变差甚至失去响应能力。电动汽车实际运行过程中,转矩控制通过加速踏板角度的变化给定,由于行驶工况复杂,踏板变化频繁,没有比较固定的数学模型和规律可循,传统方法建立的PI控制器无法很好跟随外界路面环境的变化做出实时调节,造成控制效果不理想[5]。此时可以利用模糊控制器来在线调节PI参数,充分发挥其优良控制作用,使整个系统达到最佳控制效果。
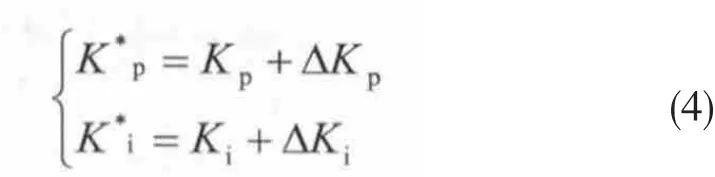
模糊控制器以误差E和误差的变化量EC作为输入变量,在运行中不断地检测E和EC,并根据控制规则得到推理输出。模糊PI调节器由模糊控制器接收控制系统中的偏差分量及其变化率,根据控制规则得到PI调节器Kp和Ki的在线参数调整值修正值ΔKp和ΔKi,从而针对不同的工况命令都可以得到较好的控制跟随效果,实现对PI控制的优化,其控制框图如图1所示,得到在线整定参数Kp*、Ki*分别为
选取输入变量E和EC以及输出变量U的模糊子集均为:{NB,NM,NS,ZE,PS,PM,PB},将区间转化为标准论域[-3,3],其模糊变量隶属函数如图2[6],并由此建立模糊控制规则列表。
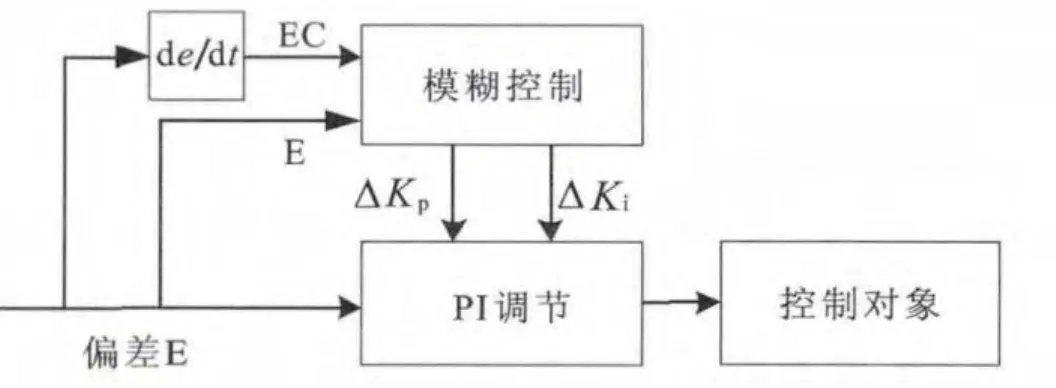
图1 模糊PI框图

图2 模糊变量隶属函数
表1 模糊控制规则列表
在Matlab中绘制出E、EC以及输出U的控制规律三维图。

图3 模糊控制输入输出三维图
在Simulink中搭建模糊控制器对PI调节器的优化模型,观察各PI调节器对阶跃信号的控制跟随情况,可见模糊PI控制器在响应速度和超调量控制以及稳定时间等各个控制参数上都要优于普通的PI控制器[7]。
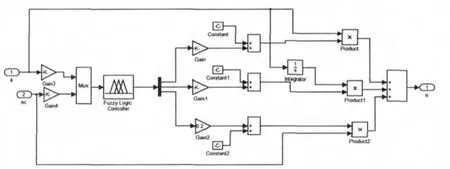
图4 模糊控制建模
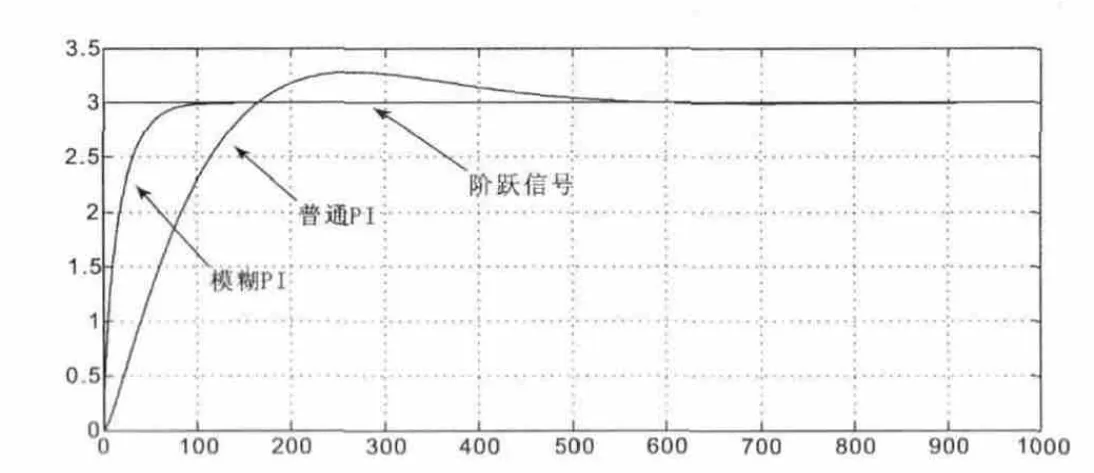
图5 模糊PI与普通PI比较
3 电机参数识别
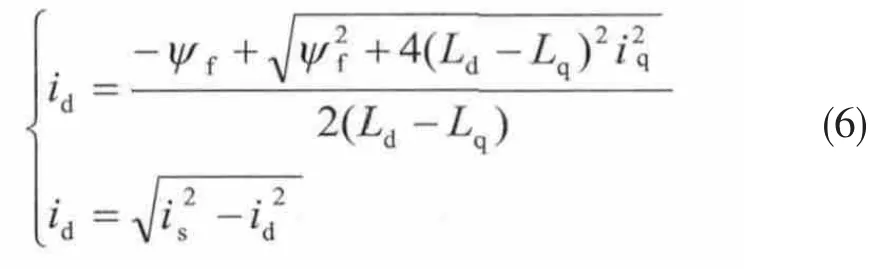
在最大转矩电流比控制中,需要通过电机参数计算给定转矩Te的最小定子电流is。根据公式(1)的电机电磁转矩方程,构造拉格朗日公式得到

对其中变量求偏导可得最大转矩电流比中交直轴电流计算公式如下:
在项目控制过程中,由于计算量太大,一般都是通过离线控制的表格存储在控制器中,根据不同转矩值给定,查询得到id、iq的最优配置。然而电机在运行中,随着电流增大会出现磁饱和状态,表现为各轴的局部磁饱和和两轴之间的交互磁饱和。在传统控制过程中,d、q轴的磁链和电感简化为常数,离线建立id、iq的最优配置控制表,运行时忽略了磁饱和参数的影响,会影响系统运行的准确性[8]。
针对传表格参数固定的控制缺陷,本系统中建立在线识别三维控制表格,对不同工况下交直轴电感标定,然后通过在线参数识别得到对应电感分量,查找转矩电流表格得到最优化控制,提高控制精度。
在低速小电流情况下,交直轴电感基本可以忽略饱和的影响,所以辨识算法只有当ωriq和ωrid超过某一给定值后才开始执行,同时为了抑制定子电流电压采用时的偏差,对结果低通滤波。电机运行中的电感参数辨识过程如图6,其中Ld0、Lq0为交直轴电感的初始给定参数。
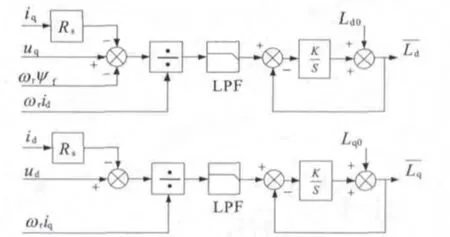
图6 交直轴电感参数识别
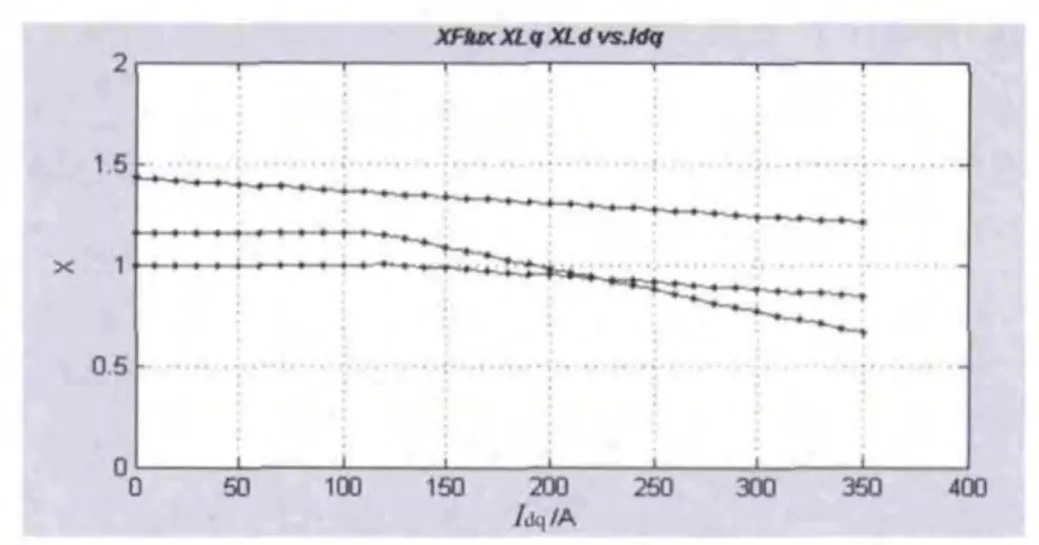
图7 电机参数相对原始值变化率
图7 为实际运行中磁通以及交直轴电感趋势图,可以看出在定子电流较小时,交直轴电感变化很小,之后随着电流增大,永磁磁通、d轴与q轴电感随着电流增大相应下降。其证明了参数辨识的必要性,这种识别也有效提高了交直轴电感变化情况下电机的控制精度,避免了参数变化带来的控制误差[9]。
4 控制系统搭建
本项目采用矢量控制双闭环系统进行车用IPMSM控制,汽车行驶中主要通过改变转矩参考量影响转矩环对车速进行调控,在切换档和转矩超调时速度环起到平衡振荡快速响应的作用[10]。运行过程中电机采用MTPA和弱磁扩速相结合的控制手段,其控制系统框架图如图8所示。

图8 控制系统框架图
电机运行曲线如图9所示,受到电机及逆变器额定电流imax和最大输出电压umax的限制。在恒转矩区电机工作在MTPA曲线上,根据工况不同可以在OA曲线上运行。A点对应最大转矩输出,通过A点的电压椭圆对应转折速度,此时电流调节器饱和丧失调节能力。想要速度继续上升,需要减小iq增加id,恢复调节器对定子电流的控制能力。其效果表现为对永磁体的去磁效果以及电机的进一步速度提升,即为弱磁控制算法。弱磁升速到一定阶段,由于功率限制,电机运行在最大功率输出轨迹上,以恒功率运行。
MTPA与弱磁控制结合需要确定各自运行区域及切换点,这是通过算法选择器实现的。由于最大承受电压限制,算法选择器检测ud和uq电压分量进行比较,其中udc为直流侧电压:

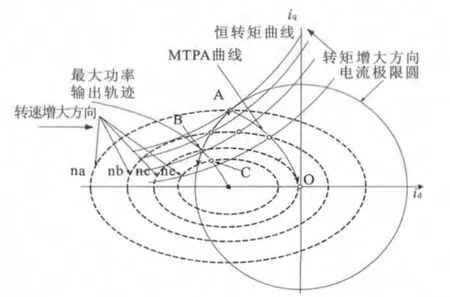
图9 电机运行曲线
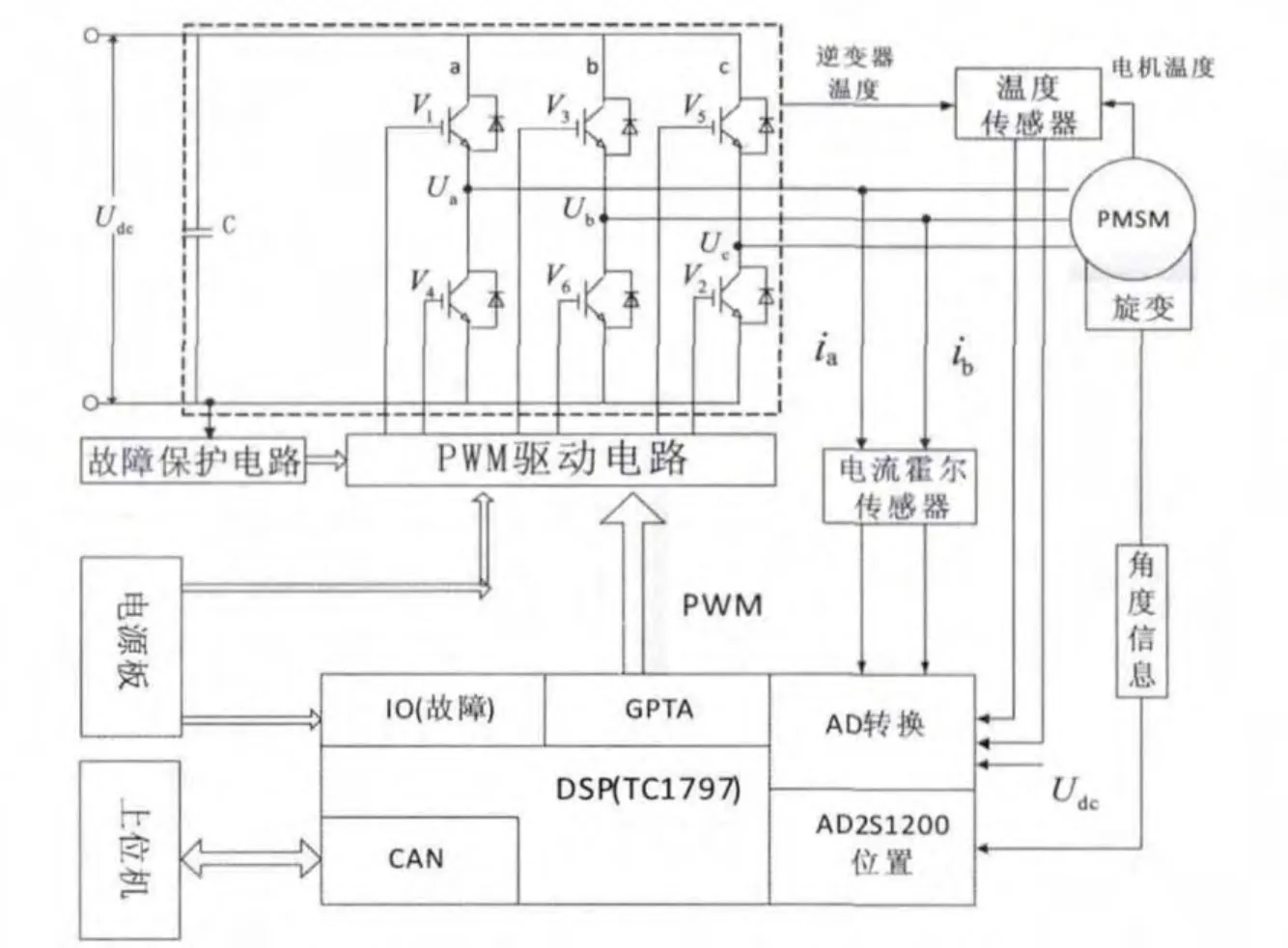
图10 硬件设计框图
根据项目要求,搭建额定功率42 kW的IPMSM实验控制平台,采用Infineon公司TC1797高速数据处理DSP作为主控芯片,系统硬件主要包括主逆变电路、控制电路、检测及保护电路模块等组成。系统硬件设计框图如图10所示。
系统采用Infineon公司HybridPACK2型号的IGBT模块,开关频率设置为10 kHz。用集成CONCEPT作为IGBT驱动,确保驱动兼容性和可靠性。驱动板集成有短路保护监控、错误输出禁止运行、欠压关断和状态反馈等保护功能,当发出故障警告时,驱动板产生FO故障信号,使输入到IGBT的电平全部置为低电平,达到屏蔽PWM信号以及保护系统硬件电路的目的。
电动汽车工况复杂恶劣,需要采集各种信号满足运算以及安全的需求。其中转子位置采用旋转变压器作为传感器,通过AD2S1200解码芯片解码输出位置信号。电压、电流采样选用LEM公司的霍尔传感器作为检测元件,经过滤波、限幅稳压后送至DSP。温度采样则通过温度传感器采集IGBT内部温度、逆变器温度和电机的温度,监控是否存在过热的问题[11]。
5 实验结果与分析
车用IPMSM控制系统平台基于C语言编写而成,编译环境为Tasking软件。控制芯片通过CAN模块与上位机连接,数据交互软件为CANape,采集电机运行参数并下达控制命令。
5.1 主参数波形
电机运行试验时,采用双分量调试控制,可变调试量为速度和转矩。图(a)为弱磁调速升至8 500~9 000 r/min的速度曲线图,图(b)是转速调节过程中对转矩的增量调控和反馈曲线,转矩最高达到130~140 N·m的工况,可以看出经过模糊PI优化,控制参数动态跟随获得较快响应和较好控制效果。
5.2 运行参数波形
为监控系统响应跟随情况,图12采集运算中电流与电压各解耦分量波形,图(a)为id和iq的解耦曲线,图(b)为定子限制电压矢量us曲线,图(c)为ud和uq的解耦曲线,图(d)为电流与电压角度变化曲线。结合速度曲线可以发现在1 600 s之前交直轴电流分量稳定,电机运行在恒转矩区,us随速度攀升逐渐增大。在此区间电机采用MTPA控制算法,并通过在线参数识别对交直轴电流分量优化分配,达到最小损耗的目的。
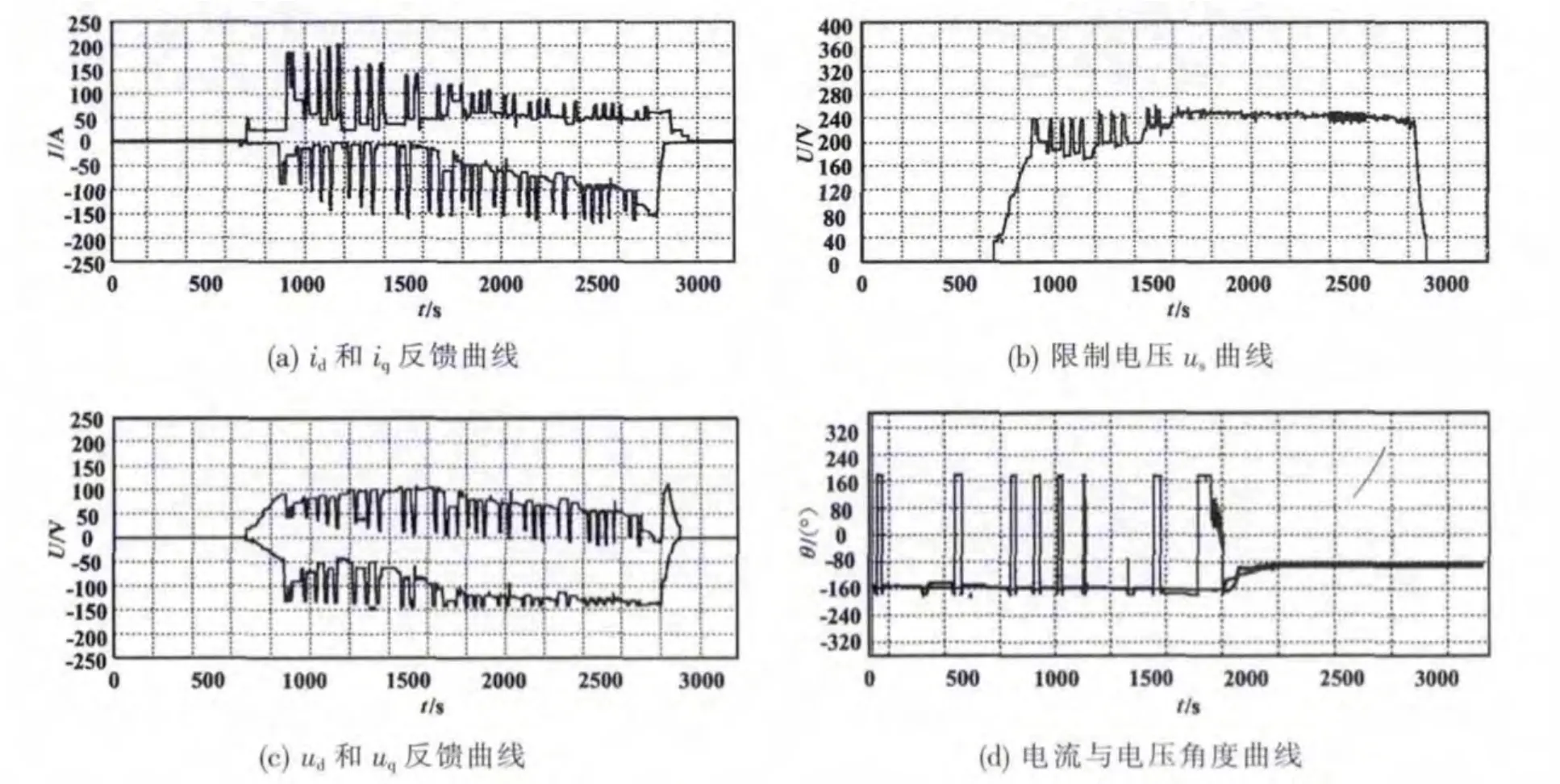
图12 CANape采集电机计算参数波形
在1 600 s左右us达到了限定值最大值,不能继续增长,由算法选择器判断进入弱磁控制区间。此后id很明显开始反向增大,通过削弱永磁体磁通达到继续升速的目的,us则保持恒定值不变。在MTPA算法过程中,永磁磁通转矩在电磁转矩中占主导地位,而随着弱磁切换和速度的继续提升,到一定速度后由于定子电流和最大功率限制,iq会有一个慢慢减小的过程。而磁阻转矩则会随着id的反向增大所占转矩比重逐渐增大,并在一定程度上弥补了转矩电流减小造成的总转矩下降。图11和图12显示了算法中最大转矩电流比与弱磁扩速结合的控制轨迹,本文提出的模糊PI控制和参数辨识对IPMSM控制优化效果也比较理想。
6 结语
本文以TC1797为主控芯片,提出一种适用于电动汽车的高性能IPMSM控制系统,使用模糊PI和在线参数识别对矢量控制算法进行优化,并详细设计控制系统中软硬件模块,最终根据实验参数变化情况,对控制应用进行分析。结果证明系统具有优良的调速性能和较好的工程应用价值。
[1]Bolte E,Sahhary B J.Dynamic performance analysis of permanent magnet synchronous machines[J].Electrical Machines and Power Electronics,2007,9(10-12):513-519.
[2]陈继华.旋转变压器在永磁同步电机控制系统中的应用[J].电机与控制应用,2012,39(5):18-21.
[3]李高林,罗德荣,叶盛,等.基于电动车的永磁同步电机的弱磁控制[J].电力电子技术,2010,44(6):88-89.
[4]张鹏,夏超英.永磁同步电动机弱磁调速控制方法的研究[D].天津:天津大学,2007.
[5]张志远,万沛霖.一种用于电动车辆驱动控制的模糊控制系统设计[J].电机与控制学报,2005,9(3):203-206.
[6]程博,叶敏,李雪.基于模糊矢量及弱磁扩速机理的电动汽车控制研究[J].中国机械工程,2012,23(15):1884-1889.
[7]石辛民,郝整清.模糊控制及其MATLAB仿真[M].北京:清华大学出版社,2008.
[8]吴志红,李根生,朱元,等.考虑参数变化的车用永磁同步电机最大转矩电流比控制[C].2011中国电工技术学会学术年会,2011.
[9]黄鹏,苗长云,黄雷,等.参数在线估算的永磁同步电机最大转矩电流比控制[J].煤炭学报,2011,36(1):172-176.
[10]陈阳生,黄碧霞,诸自强,等.电机参数误差对永磁同步电机弱磁性能的影响[J].中国电机工程学报,2008,28(6):92-98.
[11]王桂荣,李太峰.基于DSP的PMSM矢量控制系统的设计与研究[J].电力电子技术,2012,46(2):114-116.
猜你喜欢
上海大中型电机(2021年2期)2021-07-21
上海大中型电机(2021年2期)2021-07-21
防爆电机(2021年1期)2021-03-29
防爆电机(2020年6期)2020-12-14
测控技术(2018年2期)2018-12-09
通信电源技术(2018年5期)2018-08-23
通信电源技术(2018年5期)2018-08-23
河北地质(2016年4期)2016-03-20
电测与仪表(2014年13期)2014-04-04
电力工程技术(2014年1期)2014-03-20