单相并网逆变器电压环控制器的设计
2014-12-28 06:15庞晋永王正仕
电源学报 2014年1期
庞晋永 ,谢 宇 ,周 贺 ,王正仕 ,林 之
(1.浙江大学 电气工程学院,浙江杭州 310007;2.国网浙江象山县供电公司,浙江宁波 315700)
引言
中小功率光伏并网系统大都采用单相结构,采用电压电流双环控制。其中又分为双级式系统[1-2]以及单级式系统[3]。由于输出功率的时变性,一般系统在逆变级前都需要有大电容起到功率平衡的作用,并通过电压环来控制电容电压的稳定。电压环的设计可以选择不同的控制方式。传统的电压环PI控制设计较为简单[4],但因PI环节增益为-20 db/十倍频,同时也会引进相位差,对电容电压上的低频纹波衰减有限,需要在输出电流的THD以及母线电压动态响应性能之间做折中选择;或者通过硬件电路吸收该100 Hz的纹波[5],该方案通过直流母线电容上并联一LC谐振电路对100 Hz纹波起到旁路作用,但会额外增加成本,并且改变了系统的传递函数;也可以采用其它控制方案,如直接电容电流控制[6],增加了额外的电流传感器以及控制难度;或者使用PI控制串联二次陷波器[7],该方案通过二次陷波器对100 Hz纹波的强衰减作用来减弱其在控制环路中的影响,设计方法较为复杂。针对双级式系统,本文提出一种基于功率能量平衡的电压环控制器设计方法,结合前馈控制进一步消除直流母线上100 Hz纹波对控制系统的影响,并通过搭建一台1.5 kW并网逆变的样机进行了实验验证。
1 基于能量平衡的控制器数学模型与参数设计
1.1 单相光伏并网逆变器建模
采用单电感滤波的单相并网逆变系统如图1,Vin为直流母线电容的输入电压,即DC-DC级的输出电压。
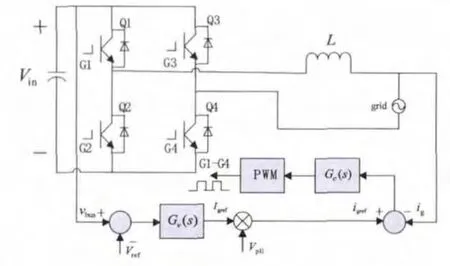
图1 光伏发电系统逆变级结构图
对光伏系统,忽略器件非理想特性引起的损耗(包括开关损耗、通态损耗等),变换器输入、输出以及电路内部储能元件之间分别存在着功率和能量的两个平衡关系,如(1)式:
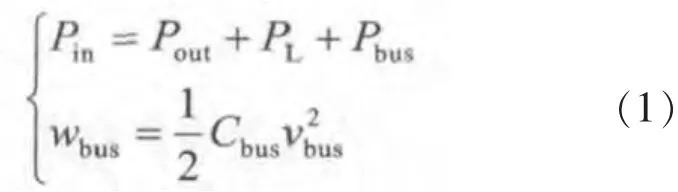
式中:Pin为直流母线电容上的输入功率;Pout为逆变器输出到电网的功率;PL为滤波电感上的即时无功;ig为逆变器并网电流;Cbus为母线电容;Pbus=为母线电容上的即时无功;vbus为母线电容上的电压;wbus为母线电容上的即时能量。
闭环目标为vbus的稳定,由上述等式推导出来的传递函数中将引入二次项v2bus项,其非线性使得系统的设计变得复杂化。为了使系统线性化,故对其作了近似处理[8]:

式中:Vref为直流母线电压闭环参考值。
令Vg为电网电压的幅值,Ig为并网电流的幅值。假设并网电流能够完全跟踪指令电流,即Ig=Igref,则输出功率表达式为:

式中:ω为电网的角频率。
电压环PI控制的表达式为:

而输出功率中包含两部分,直流部分以及二次脉动部分。因电压环控制目标为电压的直流量,故在电压环建模的时候可以只考虑直流成分。由(1)~(4)式,PL的周期平均值为0,得到采用PI控制的直流母线电压环的简化传递框图如下:
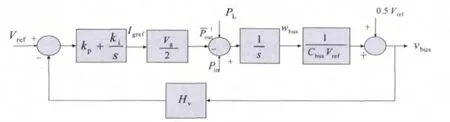
图2 系统电压环的简化控制框图
1.2 开环传递函数及伯德图
由电压环的传递框图,对两级式系统而言,因Vref为一常数,故系统扰动是由Pin的扰动引起的。设反馈系数Hv为1,可以得到系统开环传递函数为:

上述建模中忽略了PL以及输出功率Pout的脉动。一般L为mH级别,有PL<<Pout故其可以忽略,而Pout有100 Hz的脉动,导致直流母线电容电压存在100 Hz的纹波,该纹波会干扰控制环,影响并网电流质量。故补偿后系统的开环传递函数截止频率要远小于100 Hz,同时系统要有足够的相位裕度(工程上一般选相位裕度为45°~60°)。本例中采用的截止频率为2 Hz,相位裕度选择为35°,计算取PI环节得出系统开环传递函数BODE图如下:
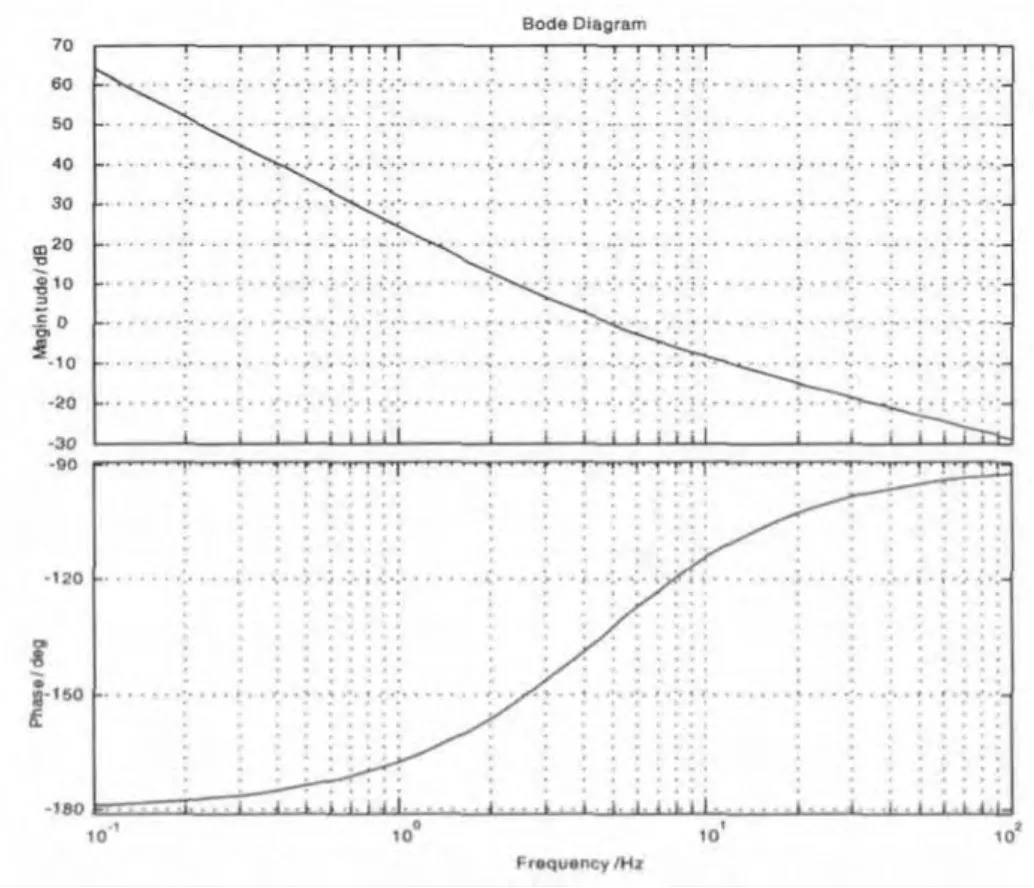
图3 经过PI补偿后电压环的开环传递函数BODE图
1.3 针对二次谐波的补偿
系统的输出功率为直流量叠加上一二次分量,该功率的二次分量耦合到直流母线电容上,会在母线电压上产生二次脉动。
由系统的传递框图可知,假设电网以及电流环均为理想的,输出为单位功率因数,由(3)式可知,稳态时,应有则Pout中的二次脉动量将流经反馈回路,经过积分环节和比例环节,在直流母线上形成二次脉动。则直流母线上脉动量表达式为:

(7)式中直流母线上的二次脉动,在控制环中与锁相环信号相乘之后产生三次分量,将导致并网电流中三次谐波增大。减小电压环回路增益可以衰减母线电压二次脉动的影响,但系统稳定裕度也会减小;或者引入较为复杂的电流环控制方式如重复控制等获取较好的THD。
本文考虑简化设计,通过前馈的方式来消除v˜bus对控制系统的影响。控制目标是vref-vbus=0,则在PI环节之前引入前馈量vfed,令:

可消除母线电压二次谐波对控制环路的影响。式中Cbus、Vref和Vg均为已知量,ω通过锁相环获取,对Ig。在并网电流能够正常跟踪的时候,Ig的值可以近似用Igref来代替。由此,得到前馈补偿后的系统传递框图如下所示:
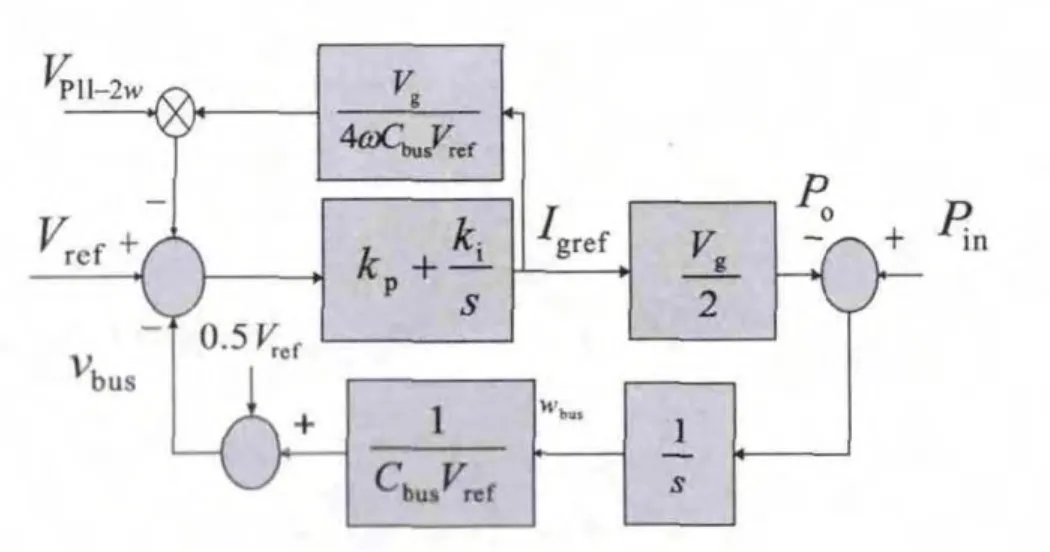
图4 经过前馈补偿后电压环控制框图
2 实验验证
搭建了基于BOOST前级的双级单相并网逆变样机。实验采用TMS320F2808作为主控芯片,逆变器参数如下:额定输出功率1.5 kW,并网电压为220 V,开关频率fs=20 kHz,并网滤波电感L=8 mH,直流母线电容为470 μf×4并联,电压环参考值Vref=350 V。实验考察系统在1 000 W到1 500 W的阶跃响应以及满载稳态波形(其中发生输入功率跳变的时刻为t1,在图中标注)。
加进前馈之后的波形如图6:
可以看到,加进前馈之后波形质量有了显著改善,而系统动态性能没有明显影响。
在只使用PI控制器的情况下,为了取得同样的波形质量,另取波形如图7:
由图6和图7对比可见,同样的稳态波形质量,发生输入功率突变时,未加前馈的系统调整时间>10 s,最大超调量约为30 V,而加进前馈的系统调整时间<1.5 s,最大超调量约为15 V。
表1 是三组实验的测量所得数据对比:
图5 PI控制器1、未加进前馈时的阶跃响应波形(左)及稳态波形(母线电压及并网电流)

图6 PI控制器1、加进前馈时的阶跃响应波形(左)及稳态波形(母线电压及并网电流)
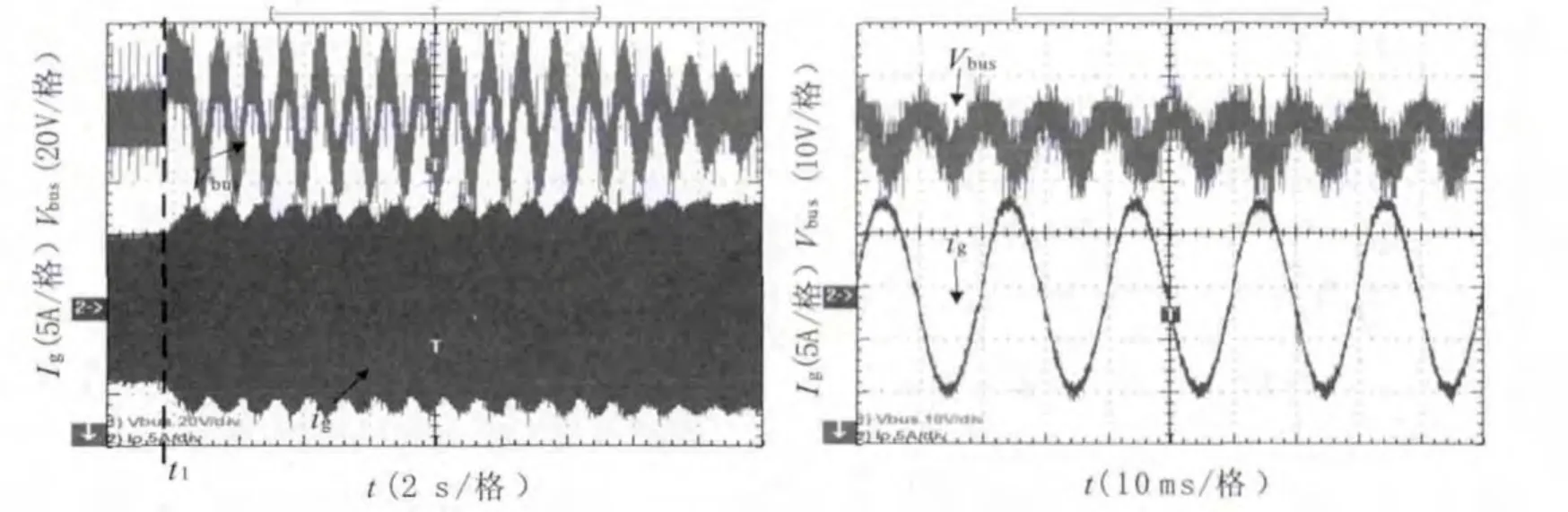
图7 PI控制器2、未加前馈时的阶跃响应波形(左)及稳态波形(母线电压及并网电流)
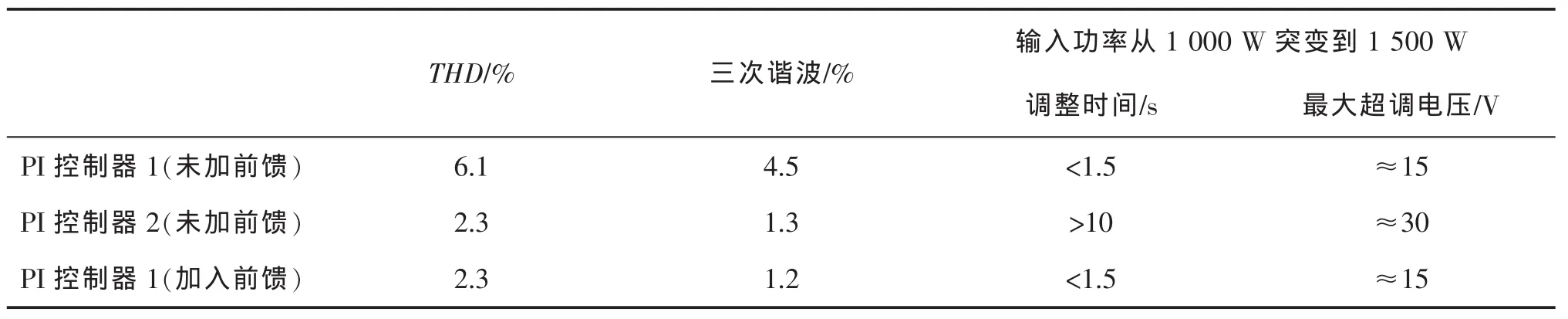
表1 不同实验方案的测量数据对比
3 结论
本文对光伏并网系统中逆变环节的电压环进行了详细建模,针对直流母线电容上的二次谐波,提出了PI+前馈控制的策略,同时通过实验验证了该方法可行性。该控制策略能在不影响动态性能的情况下有效减小并网电流THD,并且简单易实现。
[1]程军照,吴夕科,李澍森,等.采用Boost的两级式光伏发电并网逆变系统[J].高电压技术,2009,35(8):2048-2052.
[2]曹太强,许建平,祁强,等.单相光伏并网逆变器控制技术[J].电力系统自动化,2012,32(5):133-136.
[3]李琮,杨志坚.基于DSP的单级式光伏并网逆变器研究[J].电力电子技术,2011,45(1):36-38.
[4]陈瑞睿.光伏并网发电系统运行控制技术研究[D].杭州:浙江大学,2013.
[5]Yaow-Ming Chen,Hsu-Chin Wu,and Yung-Chu Chen.DC Bus Regulation Strategy for Grid-Connected PV Power Generation System[A].International Conference on Sustainable Energy Technologies[C].2008:437-442.
[6]Bon-Gwan Gu,and Kwanghee Nam.A DC-Link Capacitor Minimization Method Through Direct Capacitor Current Control[J].IEEE transactions on industry applications,2006,42(2):573-581.
[7]Sayed Ali Khajehoddin,Masoud Karimi-Gharte mani,Praveen K Jain,et al.DC-Bus Design and Control for a Single-Phase Grid-Connected Renewable Converter With a Small Energy Storage Component[J].IEEE transactions on power electronics,2013,28(7):3245-3254.
[8]Sayed AliKhajehoddin,Masoud Karimi-Ghartemani,Praveen K Jain,et al.A Systematic Approach to DC-Bus Control Design in Single-Phase Grid-Connected Renewable Converters[J].IEEE transactions on power electronics,2013,28(7):3158-3166.
猜你喜欢
中国特种设备安全(2022年3期)2022-07-08
山东电力高等专科学校学报(2019年5期)2019-11-01
光源与照明(2019年4期)2019-05-20
自动化与仪表(2018年7期)2018-07-31
科技视界(2018年24期)2018-01-03
中国设备工程(2017年24期)2017-12-28
电镀与环保(2016年3期)2017-01-20
电测与仪表(2015年4期)2015-04-12
舰船科学技术(2015年8期)2015-02-27
电子设计工程(2015年4期)2015-02-27