基于模糊理论的车型识别在不停车收费系统中的应用
2014-12-24 06:53郑晓彦刘帅卿
科技视界 2014年20期
郑晓彦 刘帅卿
(郑州信息科技职业学院,河南 郑州450046)
0 引言
随着社会的发展,我国所拥有的汽车数量与日俱增,伴随而来的城市交通拥挤问题也日益严重, 交通的拥挤不仅影响人们的出行、工作和学习,在排队等待缴费的汽车所排放的尾气也会污染环境,因此快速对过路车辆进行车型识别对于缓解交通压力, 抑制环境污染具有重要的意义和作用,模式识别的方式有很多种,如:红外线探测法[1],传感器识别法,视频图像识别法[2],这些识别方式需要安装大量的设备,而且需要经常维护, 基于神经网络的车型模式识别方法算法复杂又难以实现。 而基于模糊理论的模式识别方法不需要安装太多的设备,不需要经常维护,算法也很简单,相对于上面所介绍的识别方法拥有很大的优势。
1 模糊理论车型识别方法的研究
1.1 模糊理论识别的流程
由于在电子不停车收费系统中汽车是运动着的,要想得到汽车清晰的图像是很难的,在进行车型识别的时候我们只要得到车型相关的特征信息我们就可以对车型进行准确判断,因此我们只需要在汽车通过电子不停车收费车道时对车辆在不同的时候进行图像抓拍,然后经过电脑的处理和分析,就能得到车辆的特征的信息,从而判断出车辆的具体的车型。 具体的过程如图1 所示:

图1 模糊车型模式识别流程图
1.2 图像的处理
我们通过摄像机所抓拍的图像是彩色图像,计算机不便于做进一步的处理,因此我们要将得到的彩色图像转化成灰色图像,图像的灰度化处理是将彩色图片的R、G、B 的值转换相对应的另一组数值,转化后的数值映射出不同的灰度值, 转化的过程是采用加权平均的方法。 首先我们应该给R、G、B 赋予不同的权值,然后将它们进行加权平均就能得到灰度值,通过大量验证明,当Wr=0.30,Wg=0.59,Wb=0.11 时,所得到的灰色图像最为合适,灰度化的公式为W=Wr*R+Wg*G+Wb*B。
当我们得到灰色图片以后,下一步要做的就是得到能够判断出车辆类型的特征信息,也就是说图像中不包括特征信息的部分对我们来说是次要的, 我们只需要将包含特征信息的部分给突出出来就行,而对于那些不包括特征的信息,通过技术手段对其进行衰减,已达到突出特征信息的目的,我们所得到的图像虽然不一定与原图相近,但是却把图像的特征信息给完全保留下来了,这样就能增强图像的可读性。
1.3 特征信息的提取
我们对于特征信息的提取所采用的方法主要的差影法,差影法是指将不同时刻所得到的图像进行相减, 假如所处的外部条件一致,当两幅图像进行相减时,灰度值相同的部分抵消,留下的灰度值不同的部分,这说明了汽车发生了移动,因此我们对连续时间上前后两帧灰度图像进行相减运算,然后再将结果在连续拍照的时间段上进行积分运算,所得到的图像就是整个车子的轮廓,我们就可以从得到的灰度图像中提取出车辆的特征信息。 假设连续的两帧图像为f(k-1)(x,y)和f(k)(x,y),则相邻两帧图像的绝对差灰度图像d(k-1,k)(x,y)如下所示

1.4 模糊理论模式的建立
根据我国的标准, 汽车可以大致分成下面这几种类型: 客车、轿车、越野车、载货汽车、牵引车和挂车。汽车的外形多种多样,但都可以归纳到上述的类型当中,我们将车顶长度与车底前后轮之间距离的比值和车顶到地面的距离与车底前后轮之间距离的比值建立两个模糊子集,然后根据隶属度函数公式,就可以将这六种车型给识别出来。
一般来说, 客车车顶长度与车底前后轮距离之比特点最为明显,一般在1:1 以上,载货汽车、牵引车和挂车车顶长度与车底前后轮距离之间的比值一般在2:5 以下,轿车和越野车的车顶长度与前后轮之间距离的比值在2:5 和1:1 之间,这样就能将(客车)、(轿车和越野车)和(载货汽车、牵引车和挂车)这三个模糊子集[3]区分开来,然后再根据车顶到地面的距离和车底前后轮之间距离的比值,就可以将轿车和越野车区分开来,也能将载货汽车、牵引车和挂车区分开来。
我们将车顶长度(Top-Lengh) 记作T, 车底前后轮之间的距离(Bottom-Lengh)记作B,将车辆顶部到地面的距离(Height)记作H。
根据上问的论述,我们把车顶长度与车底前后轮之间距离的比值(T/B)作为一个论域,显然0<T/B<2,可以建立起三个模糊子集,即A1{载货汽车、牵引车、挂车},A2 {客车},A3{轿车、越野汽车},并令R1=T/B,然后将车顶距离地面的距离与车底前后轮之间距离的比值作为另一个论域,同理0<H/B<2,可以建立起五个模糊子集,B1{轿车},B2{越野车},C1{挂车},C2{牵引车},C3{载货汽车}。 令R2=H/B。
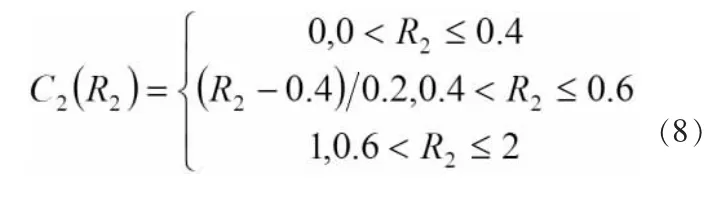
然后建立客车、载货汽车、牵引车、挂车、轿车和越野汽车的隶属度函数[4],六种车顶隶属度函数的示意图和六种车型隶属度函数公式如图2-图4 所示:
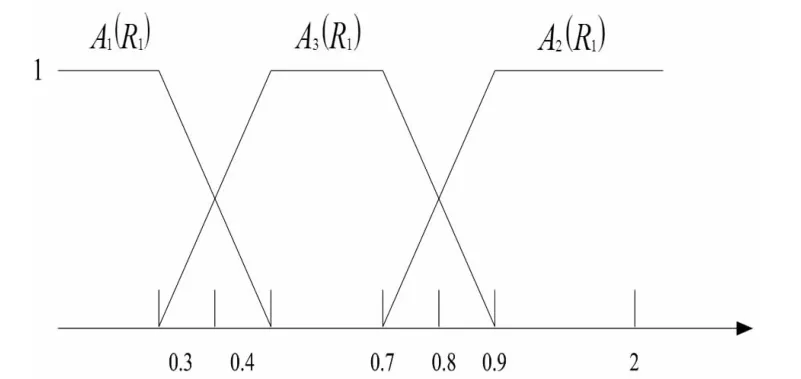
图2 六种车型最大隶属度函数示意图

图5 车型模糊识别流程图


图3 轿车和越野车的最大隶属度函数示意图

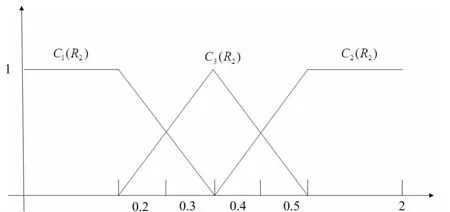
图4 挂车、牵引车和载货汽车的最大隶属度函数示意图


根据上述的公式,通过由图像所得到的汽车的特征信息,就可以将这六种车型区别开来,具体的过程如下:
首先我们采集到车辆的彩色图像,然后将彩色图像转换成灰色图像,然后根据差影检测法将车辆的大致轮廓呈现出来,然后对该图像进行特性信息的提取即车辆顶部的长度, 车底前后轮之间的距离,车龄顶部距离地面的长度,由此我们可以得到R1,R2 的值,我们就可以根据隶属度公式计算出A1(R1),A2(R1)和A3(R1),如果A2(R1)的值最大, 根据最大隶属度原则, 我们就可判断出该车辆是客车, 如果A1(R1)的值最大,我们只可以判断出该车辆是挂车、牵引车和载货汽车其中的一种类型,如果想确定车辆的准确类型,我们需要计算R2,然后再计算出C1(R2),C2(R2),C3(R2)的值,同理根据最大隶属度原则,哪个函数值大,哪个函数所对应的车型就是待测车型,同理如果第一次识别出的是轿车和越野汽车中的一种,那么需要根据B1(R1),B2(R2)的值来确定待测车辆的车型,具体的识别流程如图5 所示。
2 结论
通过模糊理论建立的模式识别方法计算量小,所需要的外部器材少,因此维修的费用少,而车型识别所需要的时间也短,从成本和效率方面来看基于模糊理论的车型识别技术都有着无可比拟的优势,因此该技术在电子不停车收费系统的有着巨大的发展前景。
[1]牟瑛.车型自动分类识别系统[J].微计算机应用,2006,4.
[2]田保慧.智能交通系统中自动车型识别技术的研究[D].西安电子科技大学,2008.
[3]杨俊.基于模糊理论的车型识别[J].计算机与信息技术,2007,3:68-70.
[4]杨纶标,高英仪.模糊数学原理及应用[M].广东:华南理工大学出版社,,2006.
猜你喜欢
汽车观察(2023年3期)2023-05-30
商用汽车(2021年4期)2021-10-13
装备制造技术(2020年11期)2021-01-26
装备制造技术(2020年3期)2020-12-25
山东交通学院学报(2020年2期)2020-07-13
读者·校园版(2019年10期)2019-05-09
中国设备工程(2017年23期)2017-01-20
汽车实用技术(2015年8期)2015-12-26
汽车科技(2015年1期)2015-02-28
河南科技(2014年21期)2014-02-27