基于D S P目标入侵检测系统的设计
2014-12-24 07:23范光星董海岗王明刚
科技视界 2014年7期
代 超 高 怡 范光星 蔡 凯 董海岗 王明刚
(西安文理学院 物理与机械电子工程学院,陕西西安710065)
0 前言
随着社会的快速发展,越来越多的生产和生活场所需要对一些禁止区域(例如仓库、变电站、银行等)进行实施监控及布防,以计算机技术和图像处理技术为基础的目标入侵检测技术显得尤为重要。目标入侵检测技术不仅可以快速、准确的判别出禁止区域内非法入侵者,还可以有效地保护了人员和财产的安全、高效地处理了危机。目标入侵检测技术在实现时涉及大量的数字信号处理算法,而一款DSP处理器TMS320DM642既可以快速、准确地实现这些算法,还提供了音视频接口,使用方便,因此成为目标入侵检测技术实现时常用的一种处理器。
1 目标入侵检测的原理
对运动目标进行入侵检测,首先要建立监控画面的背景模型并标识出禁止区域(即有利害关系的区域),其次要对监控画面中的运动目标进行准确定位及标识,最后由系统根据运动目标与禁止区域的位置关系进行有效地系统预警。
1.1 高斯分布背景模型的建立
对监控画面中的运动目标常用的检测方法有:相邻帧差法、背景帧差法、光流法[1-2]。其中,相邻帧差法是将连续两帧进行相减,从中提取运动目标的信息。虽然该算法计算量小,但是对光线变化不太敏感,甚至运动目标状态改变过慢将无法正确识别[3]。光流法是利用计算位移向量光流场来检测运动目标,该方法运算量大、实时性差。背景帧差法是将当前帧与背景模型进行比较,判断像素点是属于运动目标区域还是背景区域。背景帧差法对光照变化、气候等环境因素较为敏感,适应性较弱[4]。但是较之前两种方法而言,背景帧差法由于算法简单,易于实现,且能较为准确的提取运动目标信息,因此是应用最广泛的目标检测方法。
为了提高背景帧差法在背景模型建立时的准确性,可以先采集多幅背景图像,再建立参数背景模型。经典的背景建模算法有W4算法、中值滤波法、线性预测法和混合高斯法等。其中,混合高斯模型结构简单,运算效率高,对动态背景处理时鲁棒性也很好。因此,系统在背景帧差法中使用混合高斯模型提取背景模型,可以克服监测环境中重复的干扰、光照和水波等的缓慢变化,具有良好的鲁棒性。
在单高斯模型中,用N(μ,δ)描述某个像素点的灰度统计特性,高斯分布定义为:

而混合高斯模型使用K个(3~5)高斯函数来拟合某像素点的灰度分布。对于像素点x,混合高斯模型可定义为:


在监控系统初始化时,采集N幅背景图像,建立K个分量的混合高斯模型。实时监控时,对新的图像帧中像素点依次作检测,统计前景点的个数或比例,当个数或比例大于M(M为阈值,针对环境等条件改变)时,认为存在运动目标,否则作为干扰。同时对背景模型参数不断更新,以适应背景的变化。
1.2 运动目标定位及标识
对目标的定位主要采用的是背景帧差法和连通分析。背景帧差法即用当前帧对背景作差,帧差后背景区域为黑色,只剩目标和扰动像素。由于混合高斯模型没有明确的背景帧,因此取K个分量中最匹配的那个分量的均值作为背景帧的灰度值。同时由于灰度图像的帧差效果往往没有二值图像明显,因此若不是特别要求,一般都可先将当前帧和背景帧根据某阈值二值化处理。

其中,f(x,y,t)表示 t时刻(x,y)点的灰度值,即;k 表示最匹配的分量:

这样处理后,所得图像中目标主体基本都比较明显。
然而,实际应用中往往还是免不了有小区域或大区域的扰动。对于比较细小的干扰,可以采用滤波和形态学收缩等进行处理;而对于比较大的区域,则只能用连通阈分析把目标区域找出来(例如,在已知目标面积比干扰面积大很多的情况下)。连通分析主要通过深度递归遍历和分类实现:
(1)假设有N个连通区域,每个区域中有M个点,构建二级链表结构体并初始化(N和M初始为0,查找过程动态增加);
(2)对经上述处理后的图像依次作种子区域生长扫描,对每个点检测是否已被分类,如果不属于已有区域,则新增一个区域,并将该点加入新区域,如果属于已有区域,加入已有区域,如果区域生长结束,进入下一个种子点;
(3)设阈值为S,则可把M大于S的区域n纳为运动目标区域,同时合并满足条件的区域。
1.3 入侵分析及预警提示
入侵分析是系统针对禁止区域,预先在监控画面上划分一块像素区域,并记录坐标,之后判断运动目标是否落入这个像素区域。当落入目标区域的像素点数量占总前景点数的比例大于某个阈值时,即判断为入侵,此时系统进行预警提示。否则,系统只对监视画面中的运动目标进行检测,而不做任何其他操作。
2 运动目标检测系统的实现
2.1 系统硬件电路的设计
运动目标检测系统的硬件平台采用模块化设计思想,以DSP处理器为核心,外接视频采集/显示模块、数据/程序存储模块、数据通信模块以及CPLD模块等。
DSP处理器选用TI公司推出的高端专用数据媒体处理器TMS320DM642作为主处理器,它具有高达4800MIPS的运算速度,64个独立通道的EDMA(扩展的自接存储器访问)控制器,3个可配置的视频日等特性。视频采集/输出模块为一路摄像机将采集到的模拟视频信号传输给视频解码芯片,后者将模拟信号转换成数字信号通过视频口传送给DSP处理器,处理器对所接收到的数字视频信号进行相关算法的处理,然后将运算后的数据通过另外一个视频口发送给视频编码芯片,后者将数字视频信号转化成模拟视频信号传输给显示器。视频解码芯片采用飞利浦公司具有代表性的SAA7113H芯片,采用ITU-BT.6568bit 4:2:2内含同步码的数据接口。输出采用SAA7121芯片,提供模拟视频输出。数据/程序存储模块包括一个4MB的FLASH以及两个32MB的SDRAM,用来存储系统的程序和数据。通信模块包括RS232等接口。CPLD模块由于可配置其内部逻辑,具有很强的灵活性,可用来辅助DSP处理器对视频图像处理平台进行时序与逻辑控制。
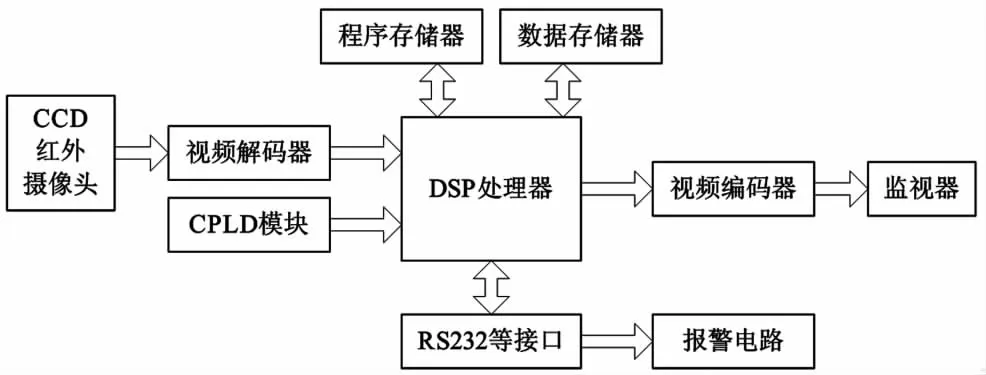
图1 系统硬件框图
2.2 系统软件设计思路
系统初始化完成后,实时采集视频图像,通过中值去噪完成图像增强,建立高斯分布背景模型,将当前帧和背景帧做差,通过灰度值判断是否有运动目标存在。再按设定的阈值剔除干扰,超过阈值即判定为运动目标,并标识运动目标。然后判断目标的像素个数占据预警区域的比例,超过设定值,系统将进行报警提示。为了增加抗干扰能力,当判定为没有运动目标的存在时,更新背景,以消除风、树叶和光照变化等环境影响。图2为系统帧处理的流程图。

图2 实时帧处理流程图
3 实验结果
硬件平台建立后对系统进行了测试,输入视频分辨率720*576,输入帧频25帧,测试结果如图3所示,黄色区域为关键区域,一旦有人靠近并进入该区域,系统将预警提示。其中,图A代表监控背景;图B为运动目标靠近关键区域时的识别状态,系统将会显示为警戒状态;图C为运动目标进入关键区,系统检测为入侵状态,系统此时为报警状态;图D为入侵目标离开,此时系统将退出报警状态,但仍会继续监视运动目标的移动轨迹。通过实际测试,系统能够较准确地发现目标,并对运动目标进行标识。

图3 目标入侵检测的监控画面
4 总结
系统以TMS320DM642为硬件平台,采用混合高斯模型和背景帧差法实现了目标入侵检测。通过实际测试,该方法拥有较好的鲁棒性,并且具有识别准确度高、实时性好、设计简单、易于实现的特点,可广泛应用于各种视频监控领域。
[1]韩九强,等.计算机视觉技术及应用[M].北京:高等教育出版社,2009:288.
[2]马德智,等.基于高斯混合模型的运动目标检测方法研究[J].电子测量技术,2013,36(10):48-49.
[3]雷科.基于 DM6446 的运动目标检测[J].计算机测量与控制,2013,21(8):2077.
[4]王占凤.基于改进的混合高斯模型背景减除算法[J].河南工程学院学报,2013,25(3):65-67.
[5]刘军,等.基于 DM642 的运动目标检测[J].计算机工程与科学,2013,35(1):108-109.
猜你喜欢
河北理科教学研究(2021年3期)2022-01-18
汽车工程师(2021年12期)2022-01-17
当代陕西(2020年14期)2021-01-08
小学生学习指导(低年级)(2019年6期)2019-07-22
中国交通信息化(2018年6期)2018-08-29
中学物理·高中(2016年12期)2017-04-22
贵州师范学院学报(2016年4期)2016-12-01
新高考·高二数学(2015年11期)2015-12-23
四川师范大学学报(自然科学版)(2015年2期)2015-02-28