
倒立摆系统的符号型自适应模糊控制
2014-12-23 01:20王琪,黄华
计算机工程与设计 2014年3期
王 琪,黄 华
(四川大学 电气信息学院,四川 成都610065)
0 引 言
倒立摆系统是一种复杂的非线性系统,对倒立摆系统的研究能有效地反映控制中的许多典型问题,因此它被广泛用于检验新的控制方法是否有较强的处理非线性和不稳定性问题的能力[1]。变论域自适应模糊控制算法是目前比较常见的倒立摆稳定控制方法之一。
模糊控制是一种建模简单,非线性适应性强的控制方法[2]。模糊控制器本质上是一种插值器[3]。所以它适用于具有模糊环境的粗糙场合[4]。为了将模糊控制更好地应用于高精度控制系统,李洪兴在研究中提出了一种论域可变的自适应模糊控制方案。变论域模糊控制器,就是选取合适的论域伸缩因子,以论域之变应误差之变,使得实际的控制规则大幅度增加[5]。实践证明,变论域模糊控制具有较高的控制精度[6,7]。但是变论域模糊控制增加了算法的时间消耗,同时伸缩因子的选择也是一大难题。如何同时实现倒立摆控制系统的快速性和精确性,已成为近来的研究热点[8,9]。
模糊控制的实施需要对输入论域进行规范化处理,而符号函数可以将输入规范至[-1,1],同时还可以简化计算。受此启发,本文决定将符号函数进行改造,替代变论域模糊控制中的伸缩操作,设计一种符号型自适应模糊控制算法。
1 倒立摆系统建模
单级倒立摆系统如图1所示。系统由小车和通过转轴固定在小车上的摆杆组成。小车可以在水平方向上左右运动,摆杆可以在铅垂平面内转动。

图1 单级倒立摆模型
规定水平向右和顺时针分别为小车和摆杆运动的正方向,图1中u为系统作用力,M 为小车质量,m 为摆杆质量,l为摆杆重心到小车的距离,θ为摆杆偏离竖直方向的角度,r为小车相对初始位置的位移,I 为摆杆的转动惯量,b为小车的滑动摩擦系数。表1列出了倒立摆系统的实验参数。分别对小车和摆杆进行受力分析[10]
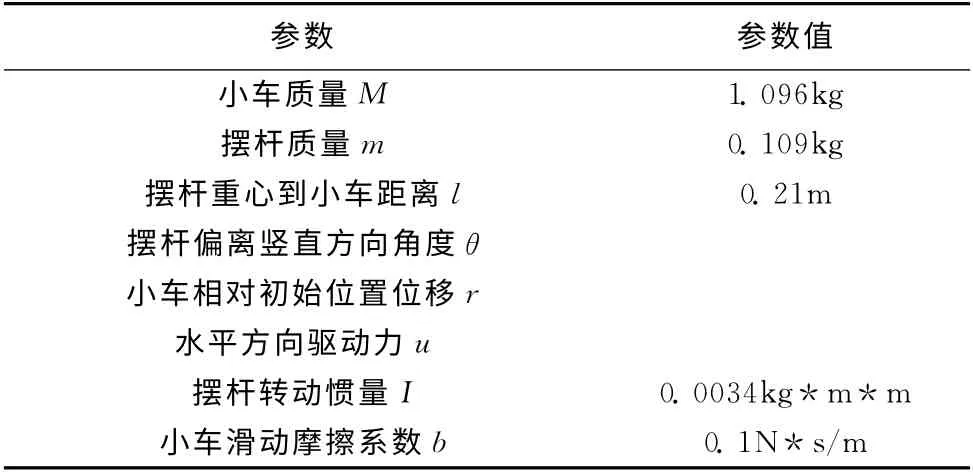
表1 倒立摆系统实验参数

选取摆杆竖直向上,小车水平无位移的位置为系统平衡位置,在摆杆偏角不大的情况下,做下列近似处理

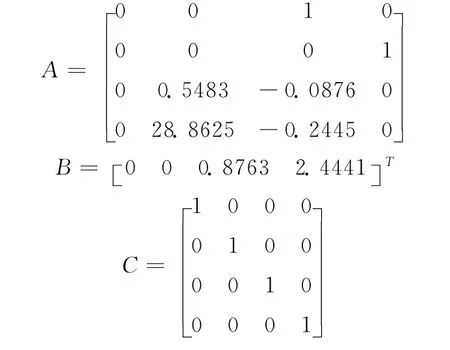
取状态变量X=[r θ r·θ·],得到系统的状态方程

将表1中参数带入可得
2 符号型自适应模糊控制器设计
2.1 变论域自适应模糊控制器简介
变论域自适应模糊控制器将论域随着输入的变化而变化,它变相增加了规则数量,提高了控制精度。下文简要介绍一下变论域自适应模糊控制器的基本结构,李洪兴在研究中详细介绍了其理论依据和实现形式。
考虑双输入单输出模糊控制器,设X=[-Ex,Ex],Y=[-Ey,Ey],Z=[-U,U]分别为输入变量x,y 和输出变量z 的论域,{Ai}(i=1,2,…,m),{Bj}(j=1,2,…,n)和{Cij}分别为论域X,Y 和Z 的模糊划分,设{Ai},{Bj}和{Cij}为语言变量,可以形成模糊推理规则库

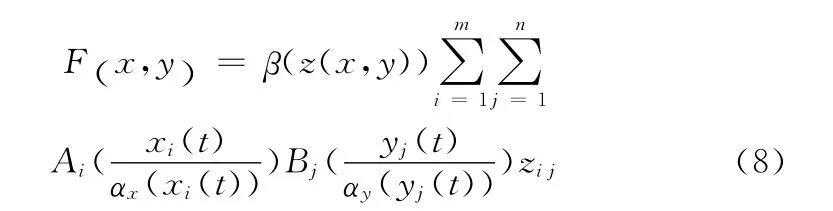
基于规则(4)的模糊控制器可以由2 元分片插值函数F(x,y)表示

所谓变论域就是论域随着变量x,y,z的变化而变化,即
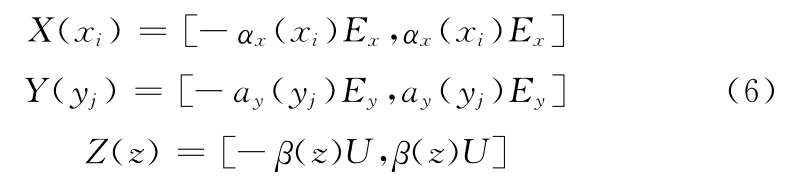
式中:αx(xi),αy(yj)和β(z)——论域X,Y 和Z 的伸缩因子。李洪兴等给出了伸缩因子应具有的性质,通常,建议输入变量的伸缩因子为下面两种形式[11]

式中:ε趋近于0,λ趋近于1。伸缩因子参数的选择直接影响控制性能,一般采用试凑的方法设计参数,这不利于实际工程应用。
变论域模糊控制器输出表示为
2.2 线性二次调节器设计
一级倒立摆系统是个多变量系统,为了便于后续控制,避免 “维数灾难”问题,可以将4个状态变量进行线性综合,最终得到综合误差E 和综合误差变化率EC,以下利用线性二次型最优控制理论来为状态方程设计状态反馈调节律。二次型性能指标函数为

式中:Q、R——状态变量和控制变量的权向量,表征它们对性能指标的重要性。在此,取Q=diag[100 100 0 0],R=1,求解下列Riccati方程

可以得到最优状态反馈矩阵K=[-10 50.921-9.035 9.4273]T,取综合系数

于是,综合误差E 和综合误差率EC 分别为

2.3 基于符号函数的调节因子设计
由于在变论域模糊控制中伸缩因子只能靠经验和试凑来选择,同时论域的实时改变增加了系统的时间开销,不利于实时控制。综上所述,本文决定使用符号函数对输入变量进行权衡,考虑倒立摆系统的控制目标为跟踪参考输入即静止状态,为了避免系统在过零点附近产生振荡,因此将传统的符号函数进行如图2所示变化。
变化后的符号函数在[-k,k]区间内根据线性函数y=x/k(-k<x<k)取值,避免了在过零点控制量过大而产生的振荡。
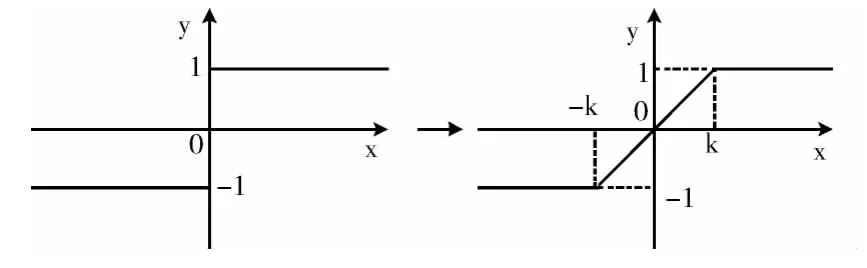
图2 符号函数变化
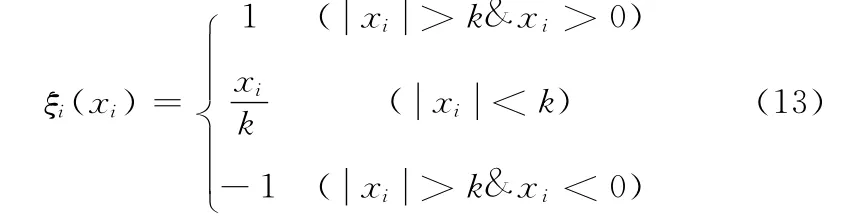
结合式(8)和式(13),控制器输出为

2.4 符号型模糊控制规则设计
由于符号型调节因子实质上为一分段函数,在符号型模糊控制规则中,将输入变量E 和EC 的论域分别划分为{-1,-|E|/k(-k<E<0),0,|E|/k(0<E<k),1}和{-1,-|EC|/k(-k<EC<0),0,|EC|/k(0<EC<k),1},即当输入变量位于[-k,k]区间时,使用前述线性函数的值作为模糊基函数的结果参与规则运算。
将综合误差E 和综合误差变化率EC 的论域规范为[-1,1],基于这两者的模糊控制规则见表2。
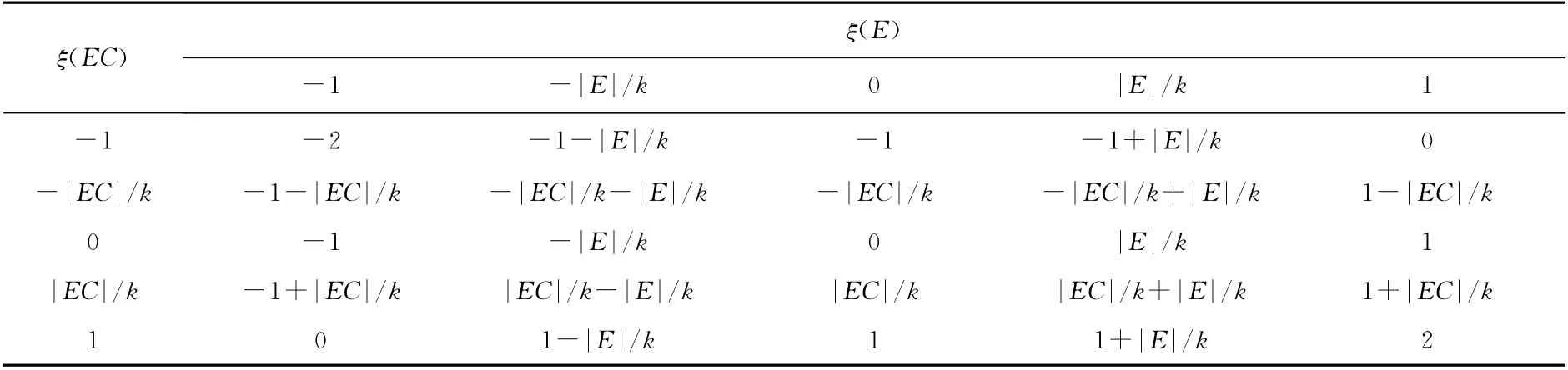
表2 符号型模糊控制规则
2.5 输出调节因子设计
采用符号型自适应模糊控制器来控制一级倒立摆,控制器的输出为uc(t),有

其中

取U=‖K‖2=53.51,β按照加权积分原理来设计。
设e为综合误差和综合误差率组成的向量,利用权向量Pn将其变为标量e*(t)=eTPn,从而和e(t)的关系可以表示为

KI为比例系数,对)在(0,t)积分便有

考虑ω(E,EC)为e*(t)在t时刻的权重,可以将上式写为加权积分形式

式中:β(0)作为一个设计参数,根据实际情况来选取。
3 仿真结果
设系统的初始状态为[0.2-0.2 0.1 0.05],在仿真实验中取β(0)=1,KI=5,Pn=[5,5]T。首先,采用本文算法和变论域自适应模糊控制算法对倒立摆系统进行仿真,其中本文算法中取k=1,变论域自适应模糊控制算法采用见表3的模糊规则。

表3 变论域模糊控制规则
伸缩因子如下式选取

选择仿真时间T=10s,仿真结果如图3、图4和表4所示。

图3 小车位移曲线
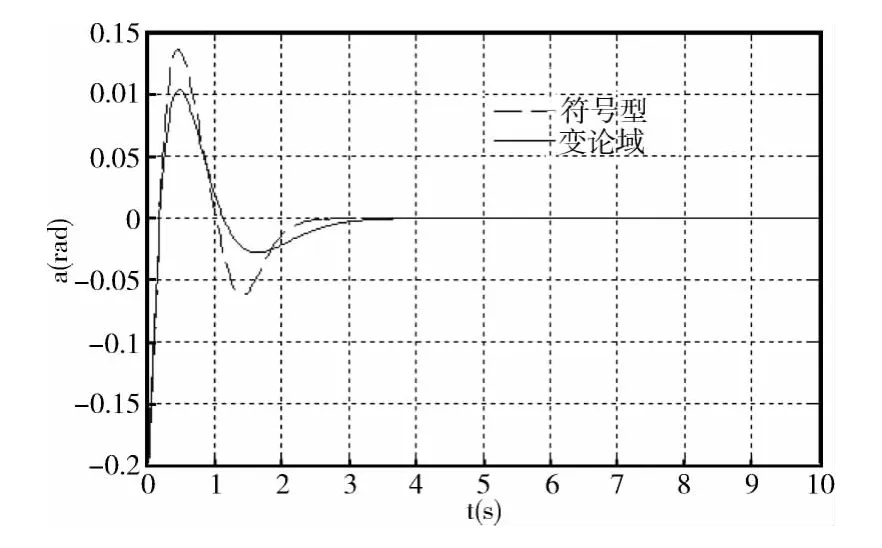
图4 摆杆角度曲线

表4 稳态精度对比(t=8.0s)
上述仿真结果表明,相对于传统的变论域模糊控制算法,符号型自适应模糊控制算法不但有效提高了响应速度,缩短了过渡时间,而且还减小了稳态误差,提高了控制精度,同时它的控制规则少,易于实现。
在本文方法中,k的取值也影响控制性能,下面分别选取k=0.8,1.0和1.1 这3 个值,在前述系统条件下进行仿真,如图5、图6和表5所示。

图5 小车位移曲线 (k值的影响)

图6 摆杆角度曲线 (k值的影响)
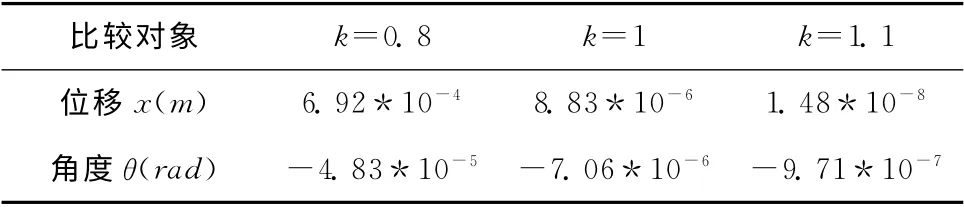
表5 k值对稳态精度的影响(t=8.0s)
根据上述结果,不难看出,k值增大,可以提高系统的响应速度和稳态精度,但是会给暂态过程带来较大的波动。应该合理选择k值,以保证系统的控制性能。
4 结束语
本文设计了基于符号型自适应模糊控制算法的单级倒立摆控制器。控制器利用变形后的符号函数权衡输入变量,相对改变论域范围,避免了伸缩因子的选择难题。该方法减少了规则数和计算量,控制结构简单,可以节约大量成本。本文按照此方法搭建了单级倒立摆仿真平台,仿真结果显示了该方法具有良好的跟踪速度和稳态精度。但符号函数的使用给暂态过程带来了波动,在本文基础上,如何提高暂态过程的平稳性,还需要后续研究。
[1]Mohamed I El-Hawwary,Elshafei A L,Emara H M,et al.Adaptive fuzzy control of the inverted pendulum problem [J].IEEE Transactions on Control System Technology,2006,14(6):1135-1144.
[2]ZENG Ming,CHEN Bing,YIN Zhongjun.Simulation and research of semi-active suspension of vehicle based on double fuzzy controllers[J].Computer Engineering and Design,2009,30(3):693-695 (in Chinese). [曾鸣,陈兵,尹忠俊.基于双模糊控制器的车辆半主动悬架仿真研究 [J].计算机工程与设计,2009,30 (3):693-695.]
[3]QIU Zhifeng,HUANG Deng,GUI Weihua,et al.Study and application of the control system based on interpolation algorithm fuzzy-PID with variable universe[J].Chinese Journal of Scientific Instrument,2008,29 (11):2435-2440 (in Chinese). [裘智峰,黄灯,桂卫华,等.基于变论域插值模糊PID控制系统的研究与应用 [J].仪器仪表学报,2008,29(11):2435-2440.]
[4]PAN Anqi,ZHANG Kairu,CHU Xuejiao,et al.MPPT control strategy based on theory of variable universe fuzzy control[J].Semiconductor Optoelectronics,2013,34 (2):316-320(in Chinese).[潘安琪,张开如,初雪娇,等.基于变论域模糊控制的MPPT 控制策略 [J].半导体光电,2013,34 (2):316-320.]
[5]LONG Zuqiang,LIANG Ximing,YOU Kangming,et al.Double-input and single-output fuzzy control algorithm with potentially variable universe and its convergence [J].Control Theory & Applications,2008,25 (4):683-687 (in Chinese).[龙祖强,梁昔明,游开明,等.双输入单输出潜遗传变论域模糊控制算法及其收敛性 [J].控制理论与应用,2008,25 (4):683-687.]
[6]ZHAO Yang,QU Xinghua,LI Rui.Self-adjusting control system of temperature based on fuzzy algorithm [J].Journal of Tianjin University,2011,44 (1):73-78 (in Chinese). [赵阳,曲兴华,李睿.基于模糊算法的自调整温度控制系统[J].天津大学学报,2011,44 (1):73-78.]
[7]LONG Zuqiang,LIANG Ximing,YAN Gang.Universal approximation properties of fuzzy controllers with variable universe of discourse and their approximation conditions [J].Journal of Central South University (Science and Technology),2012,43 (8):3046-3052 (in Chinese). [龙祖强,梁昔明,阎纲.变论域模糊控制器的万能逼近性及其逼近条件 [J].中南大学学报 (自然科学版),2012,43 (8):3046-3052.]
[8]WANG Di,YAN Weisheng,FU Jiangfeng.Fuzzy-PID control for the rudder control system of AUV [J].Fire Control and Command Control,2009,34 (12):163-165 (in Chinese).[王迪,严卫生,付江锋.模糊控制在AUV 舵机控制系统中的应用 [J].火力与指挥控制,2009,34 (12):163-165.]
[9]CHEN Fuguo,DENG Guannan,TAN Yanhua.The design of improved variable universe fuzzy controller of triple inverted pendulum [J].Control Theory & Applications,2010,27(2):233-237 (in Chinese). [陈富国,邓冠男,谭彦华.一种改进的三级倒立摆变论域模糊控制器设计 [J].控制理论与应用,2010,27 (2):233-237.]
[10]WU Shanyong.Study on control method based on inverted pendulum system [D].Xi’an:Xidian University,2009:6-9 (in Chinese).[吴善永.基于倒立摆系统的控制算法研究[D].西安:西安电子科技大学,2009:6-9.]
[11]ZHENG Hong,XU Hongbing,ZHU Guiping.Adaptive fuzzy control based on variable universe and its application to aero engine turbine power generator[J].Control Theory &Applications,2008,25 (2):253-256 (in Chinese).[郑宏,徐红兵,朱贵平.变论域自适应模糊控制在航机发电中的应用 [J].控制理论与应用,2008,25 (2):253-256.]
猜你喜欢
成都信息工程大学学报(2021年6期)2021-02-12
塑料包装(2019年6期)2020-01-15
电子技术与软件工程(2019年18期)2019-11-18
设备管理与维修(2019年14期)2019-06-16
现代机械(2018年5期)2018-11-13
人民音乐(2016年3期)2016-11-07
西南交通大学学报(2016年3期)2016-06-15
电子制作(2016年21期)2016-05-17
通信电源技术(2016年5期)2016-03-22
西北工业大学学报(2015年1期)2016-01-19
