
载人航天器密封舱温湿度独立控制方法及实验研究
2014-12-21 09:52:02刘东晓满广龙曹剑峰韩海鹰范宇峰
航天器环境工程 2014年4期
刘东晓,满广龙,曹剑峰,韩海鹰,范宇峰
(北京空间飞行器设计总体部 空间热控技术北京市重点实验室,北京 100094)
0 引言
密封舱温湿度控制是载人航天器环境控制和生命保障系统的一项重要研究内容[1]。适宜的温湿度能够为密封舱内各种设备、载荷、部件等提供良好的运行环境,同时为航天员提供舒适的工作和生活 环境[2-3]。而当舱内温度过低时,会造成空气结露,影响航天员生命安全和电子设备正常工作;舱内温度过高,则会造成航天员严重不适感,影响电子设备散热。另一方面,舱内湿度过高会造成舱内金属部件腐蚀和微生物大量滋生,影响系统结构寿命,危害航天员健康;而舱内湿度过低,则容易导致静电放电,影响电子设备安全,引起航天员身体不适。因此,通过温湿度控制为密封舱提供一个良好的温湿度环境,对于保证平台设备正常工作、航天员安全和载人航天任务的顺利开展具有重要作用。
目前国内外载人航天器密封舱均采用“主动控温、被动除湿”的温湿度一体化控制方法,使用一个冷凝换热器组件同时保证空气温度和湿度指 标[4-6],温湿度之间存在较强耦合,可能出现空气湿度控制不合理、局部结露等现象,影响航天员舒适度和设备工作可靠度[7-9]。
鉴于目前载人航天器密封舱温湿度控制方案存在的不足及未来载人航天器密封舱空气温湿度精细化控制的需求,本文拟开展密封舱温湿度独立控制方法研究,旨在通过空气温度和湿度独立控制手段设计,实现密封舱空气温湿度解耦控制,从而克服温湿度一体化控制难以同时满足空气温度和湿度双重目标控制要求的不足。
1 温湿度控制系统特性分析
载人航天密封舱通常具有相对隔离的功能空间分布,主要包括人活动区、仪器设备区、角隔等,如图1所示。其中,人活动区是航天员进行空间活动的主要区域,也是湿度产生的主要区域;仪器设备区主要用于安装平台及载荷设备,是热量产生的主要区域;角隔区主要用于通风管路、流体管路、电缆及其他辅助部件的布设安装。
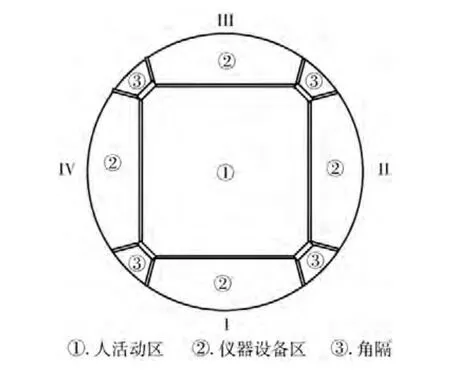
图1 载人航天器密封舱功能区域示意图Fig.1 Sectional view of manned spacecraft sealed cabin
载人航天器密封舱相对隔离的功能空间分布为热湿交换控制提供了较为便利的条件。然而,目前载人航天器密封舱温湿度控制通常采用基于冷凝干燥器组件(冷干组件)除湿、控温的一体化温湿度控制策略,典型的系统配置如图2所示。
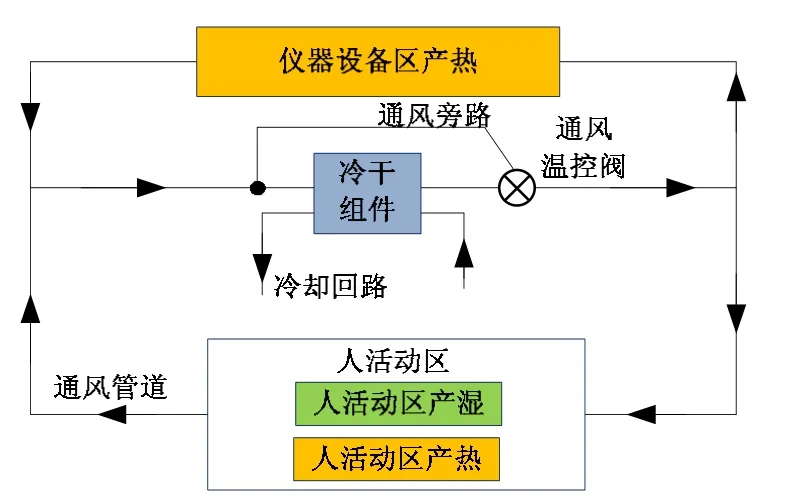
图2 载人航天器温湿度控制系统典型结构Fig.2 Typical scheme of temperature-humidity control system for manned spacecraft sealed cabin
冷干组件和通风温控阀是上述温湿度控制系统的核心功能部件,冷却回路使冷干组件具备除湿能力,通过调节通风温控阀可实现空气温湿度的控制,具体实现过程如下:
1)来自仪器设备区的热空气与来自人活动区的空气进行一次混合;
2)一次混合空气在冷干组件前端分为两路,一路进入冷干组件进行降温除湿,一路进入通风旁路;
3)来自冷干组件的低温干燥空气与通风旁路空气进行二次混合,该混合过程在通风温控阀的调节下完成,从而使温湿度可控;
4)二次混合后的空气温湿度水平为适宜航天员生活及仪器设备散热的状态,分两路分别进入人活动区和仪器设备区。
经过上述步骤的循环过程,系统温湿度通常可以达到一种相对稳定状态。然而,由于空气温湿度控制是通过一个通风温控阀实现的,从而导致空气温度和相对湿度指标会在一个较宽范围内波动(前者指标范围为17~25 ℃,后者指标范围为30%~70%)。如果这两项指标有一个超出允许范围,就需要通过通风温控阀进行调节;而空气温度和湿度存在较强的耦合关系,调整一个量势必会引起另外一个量的变化。因此,该方法采用的是“范围调整”策略,很难实现温、湿度双重目标的精确控制,极端情况下还会出现一个指标还未调整到位,另外一个指标已经超出允许范围的现象。
2 温湿度独立控制方法设计
2.1 控制原理
本文提出一种载人航天器密封舱温湿度解耦控制系统,其基本工作原理为“冷干组件控湿+气液换热器控温”,典型系统配置如图3所示。
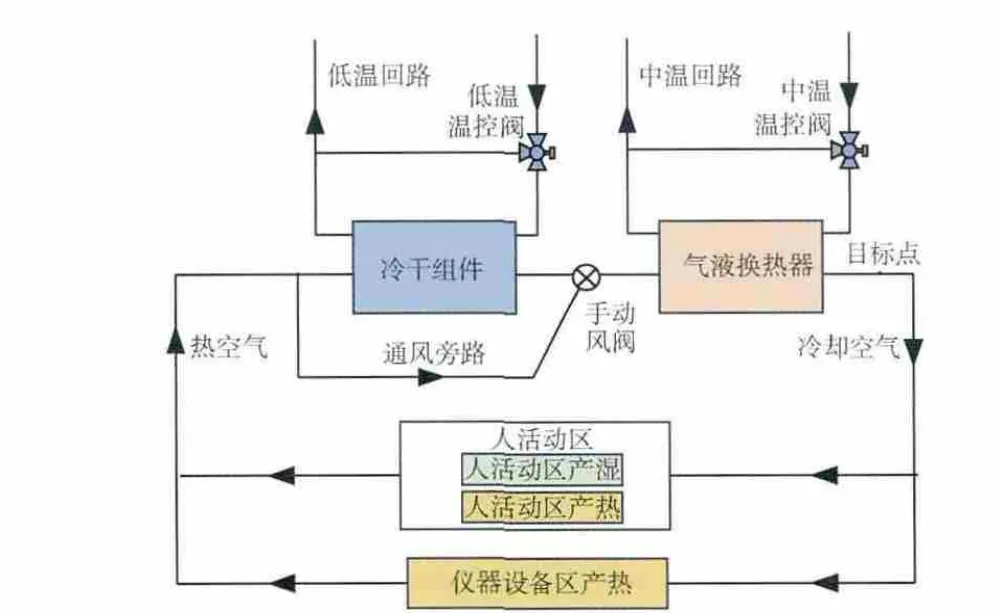
图3 载人航天器温湿度独立控制系统配置Fig.3 Configuration of mssc-THICS
上述温湿度独立控制系统的通风组织形式与传统的温湿度控制系统类似,仅增加了一个气液换热器设备,并且系统中的手动风阀仅用于系统设计时的风量分配调节,不参与实时控制。冷干组件和气液换热器是实现该系统温湿度控制功能的核心部件。此外还需要配置两个流体回路,即低温回路和中温回路,且回路中分别设置温控阀;在低温温控阀和中温温控阀的控制调节作用下,可分别实现冷干组件控湿和气液换热器控温功能。该系统的具体工作过程如下:
1)一次混合热空气分成两路,分别进入冷干组件和通风旁路;进入冷干组件的空气在低温温控阀的控制调节作用下,进行可控深度除湿,使空气 绝对含湿量达到目标要求;
2)除湿后的冷干空气与通风旁路空气进行二次混合,混合过程也是对冷干空气的预热过程,混合后空气为湿度合适、温度在常规范围的中间状态;
3)二次混合空气进入气液换热器进行温度精调,在中温温控阀的控制调节作用下,空气温度达到目标设定值,此时空气为湿度合适、温度亦合适的最终状态;
4)其他环节工作过程与传统温湿度控制系统工作过程类似。
通过上述循环工作过程,可实现密封舱温度和湿度双重指标的精确控制。该温湿度独立控制系统基于冷干组件控湿和气液换热器控温原理,通过低温、中温双回路设计实现,在控制手段上保持了温湿度控制的独立性,从硬件层面解决了系统温湿度控制的强耦合问题。
2.2 控制策略
合理的温湿度独立控制系统设计为实现温湿度解耦控制提供了硬件基础,然而要实现温湿度独立控制还需要选择合适的控制策略。考虑温湿度控制的相对独立性,采用基于绝对含湿量控湿的温湿度双闭环控制策略,其控制原理如图4所示。
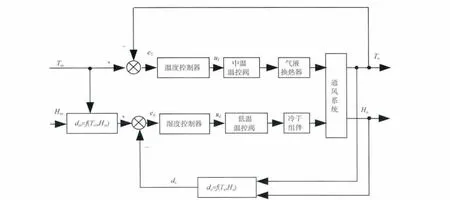
图4 基于绝对含湿量控湿的温湿度双闭环控制策略Fig.4 Temperature-humidity dual closed-loop control strategy based on absolute humidity control
温度闭环控制是以目标点的实时温度To作为反馈量,以目标给定值Tor作为参考量,温度控制器作为控制算法运算单元,根据温度偏差eT,生成新的阀位信号uT,作用于中温温控阀,实现气液换热器换热量调节,最终实现目标点温度控制。
湿度闭环控制是以目标点的实时绝对含湿量do作为反馈量,以目标给定绝对含湿量dor作为参考量。上述两个绝对含湿量参数无法直接设定,需要根据相对含湿量与绝对含湿量转换关系运算获取,转换关系式为

式中:d为绝对含湿量;H为相对含湿量;T为温度;下标x为“o”或“or”时分别表示反馈量和参考量。式(1)可由式(2)和式(3)联立获取,
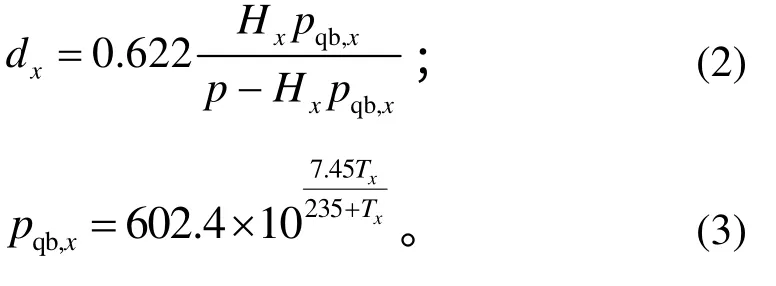
式中:p为空气压力;pqb,x为饱和蒸汽压力。湿度控制器作为控制算法运算单元,根据绝对含湿量偏差ed,生成新的阀位信号ud,作用于低温温控阀,控制冷干组件除湿量,最终实现目标点空气湿度控制。
在控制算法选择方面,温湿度独立控制系统是一个典型的过程控制系统,采用目前工业控制、航空航天等领域应用较为广泛的PID 控制算法。尽管温度闭环控制和湿度闭环控制中的控制对象不同,但控制器结构相同,仅在控制参数选取上有所区分。低温温控阀和中温温控阀均由步进电机驱动,因此,采用增量式PID 控制算法,即

式中:Δu(k)为控制输出,在系统中代表uT和ud;kp、ki、kd分别为比例、积分、微分系数;e(k)、Δe(k)、Δ2e(k)分别代表输入偏差,以及输入偏差的一次偏差和二次偏差。
3 地面验证系统配置
为了验证密封舱温湿度独立控制方法的可行 性,搭建了地面验证系统,主要包括通风、低温回路、中温回路、低温冷源、中温冷源、测控和供电等7个子系统。其实物和原理分别如图5和图6所示。
通风系统用于模拟载人航天器的密封舱环境,其中密封舱模拟人活动区,仪器设备箱模拟仪器设备区,密封舱内设置航天员产热、产湿模拟装置,仪器设备箱内设置设备产热模拟装置,通风系统通过冷干组件和气液换热器分别与低温回路和中温回路耦合,实现系统内空气的温湿度控制;低温回路和中温回路中的低温温控阀和中温温控阀在系统控制器的控制驱动作用下,实现冷干组件控湿和气液换热器控温功能;低温冷源和中温冷源等效于宇宙空间环境中的辐射器,通过低温中间换热器和中温中间换热器分别实现低温回路和中温回路的热量交换和排散;测控系统和供电系统是两个辅助子系统,分别用于系统数据采集和供电分配。
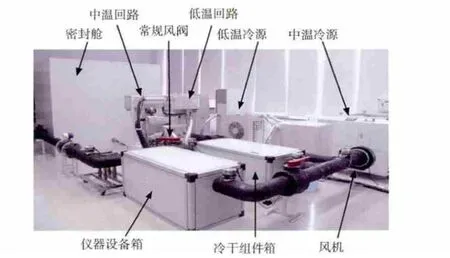
图5 温湿度独立控制地面实验验证系统实物图Fig.5 Photograph of ground experimental system for THICS
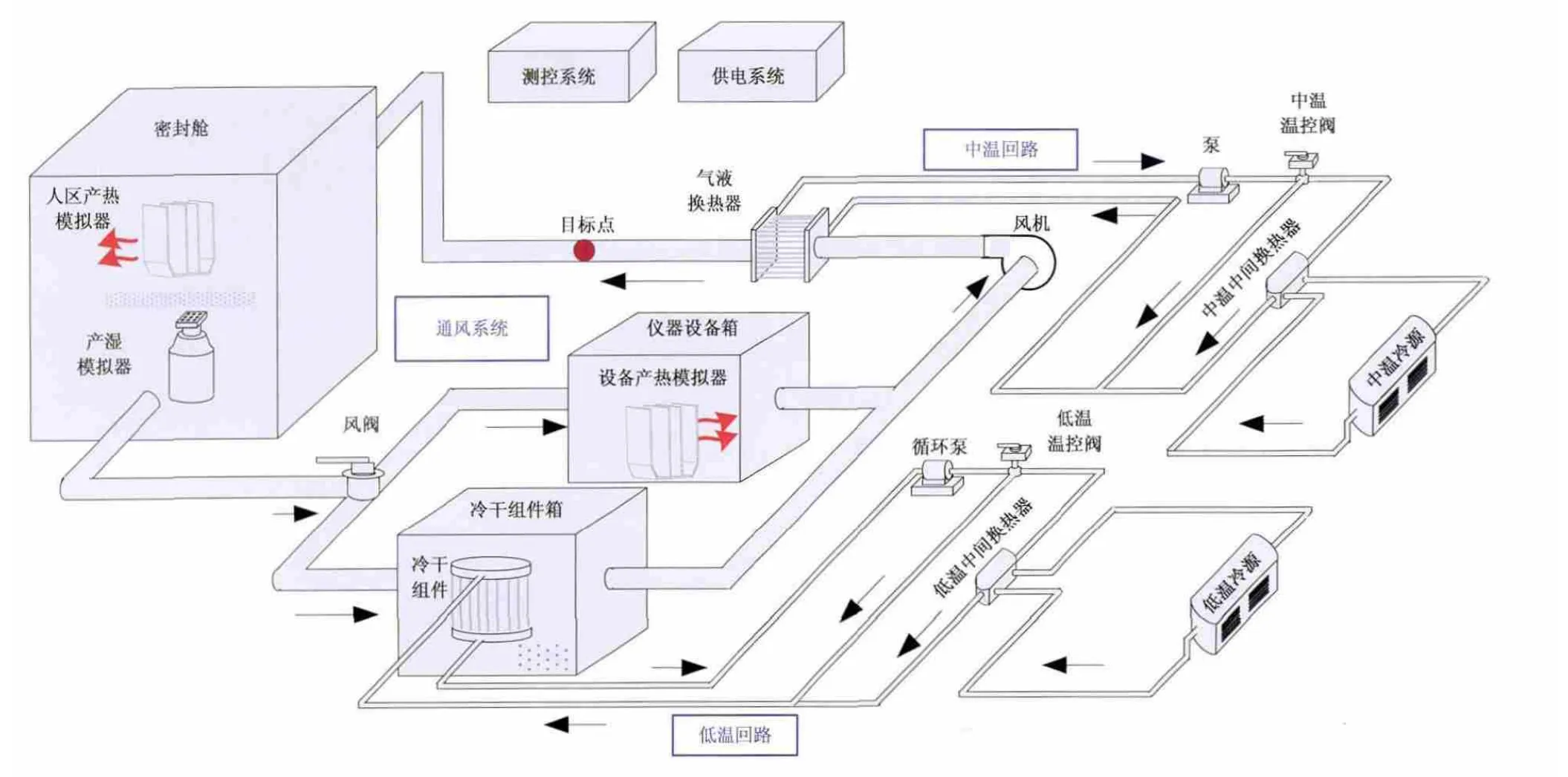
图6 温湿度独立控制地面实验验证系统原理图Fig.6 Schematic diagram of ground experimental system for THICS
4 实验测试及结果分析
4.1 变控温水平
为了验证温湿度独立控制系统的温度控制能力,进行了变温度控制水平工况测试。在低温温控阀和中温温控阀的控制作用下,系统初始状态为控温22 ℃、控湿60%RH 的平衡状态;约8 min 后,设定目标点控温参考值为23 ℃,控湿参考值不变,系统响应如图7所示。
图7(a)为温度参考值阶跃变化时的目标点实测温度响应情况,从图中可以看出,尽管调节过程中目标点温度存在短时超调,但很快收敛至参考温度附近,整个调节过程持续约5 min,且稳态误差在±0.5 ℃以内。此良好温度控制效果的取得依赖于中温温控阀的实时调节作用,其调节过程如图7(c)所示。由于温度参考值提高,为实现目标温度控制,中温温控阀整体呈开度减小趋势,以减少系统换热量,使目标温度升高;受温度参考值阶跃变化影响,短时间内会出现温控阀开度的大范围关小;随着目标温度向参考值靠近,中温温控阀调节过程趋于平缓,并进入稳定状态。图7(b)为温度参考值阶跃变化时的目标点相对湿度响应情况,从图中可以看出,由于湿度参考值保持不变,整个实验过程中相对湿度呈现平稳状态,仅在温度参考值发生阶跃变化时有短时波动,该波动主要是因为绝对含湿量是湿度控制环的直接控制量,受温度影响,绝对含湿量控制过程中会出现相对湿度变化,待温度稳定后,绝对含湿量控制也进入稳定状态,对应的相对湿度也呈现稳定状态。该调节过程由低温温控阀调节实现,如图7(c)所示。温度参考值提高后,随着目标点温度升高,相对湿度呈现下降趋势,为实现相对湿度稳定,需减小冷干组件除湿量,因此低温温控阀存在短时突然关小过程。
该实验工况通过中温温控阀和低温温控阀的独立控制调节,实现了温度-湿度双目标的良好控制,且控温偏差优于±0.5 ℃,控湿偏差优于±2%RH。
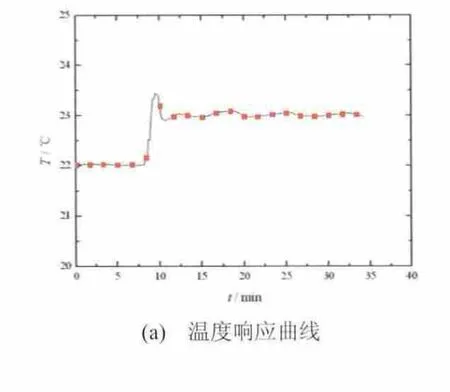
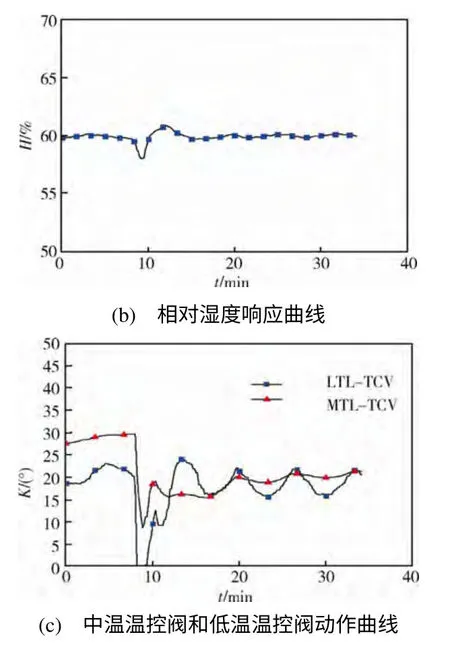
图7 变控温水平响应曲线Fig.7 Response curves of variable temperature level
4.2 变控湿水平
为了验证温湿度独立控制系统的湿度控制能力,进行了变湿度控制水平工况测试。在低温温控阀和中温温控阀的控制作用下,系统初始状态为控湿60%RH、控温23 ℃的平衡状态,约8 min 后,设定目标点控湿参考值为55%RH,控温参考值不变,系统响应如图8所示。
图8(a)为相对湿度参考值阶跃变化时目标点实测相对湿度的响应情况,从图中可以看出,尽管调节过程中目标点相对湿度存在短时超调,但很快收敛至参考值附近,整个调节过程持续约8 min,且稳态误差在±2%RH 以内。此良好湿度控制效果的取得依赖于低温温控阀的实时调节作用,其调节过程如图8(c)所示,由于湿度参考值降低,为实现目标湿度控制,低温温控阀整体呈现开度增大趋势,以增大系统除湿量,使目标湿度降低;受湿度参考值阶跃变化影响,短时间内会出现温控阀开度的大范围开大;随着目标湿度向参考值靠近,低温温控阀调节过程趋于平缓,并进入稳定状态。图8(b)为相对湿度参考值阶跃变化时的目标点温度响应情况,可以看出:由于温度参考值保持不变,整个实验过程中温度呈现基本平稳状态:期间,低温温控阀动作对温度控制存在一定扰动,但在中温温控阀的调节作用下,温度仅呈现出短时微小波动。中温温控阀调节过程如图8(c)所示,可以看出:湿度参考值降低后,随着目标点湿度的下降,冷干组件换热量增大;为实现温度稳定,需中温温控阀开度调小以减小气液换热器换热量;虽然中温温控阀调整过程中存在开度波动,但整体呈现开度关小趋势。
该实验工况通过低温温控阀和中温温控阀的独立控制调节,实现了温度-湿度双目标的稳定控制,且控温偏差优于±0.5 ℃、控湿偏差优于±2%RH。
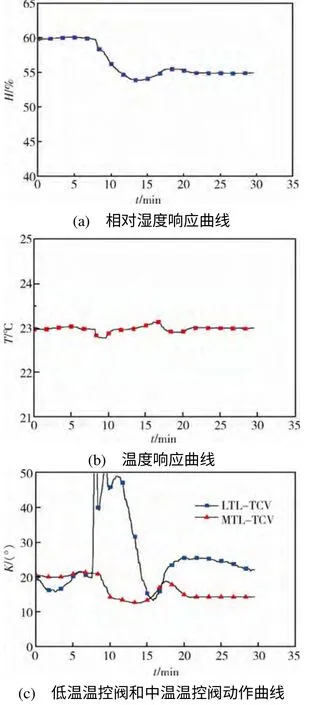
图8 变控湿水平响应曲线Fig.8 Response curves of variable humidity level
5 结束语
本文针对未来载人航天器密封舱温湿度控制的精细控制需求,提出一种基于绝对含湿量控湿的温湿度独立控制方法,选用低温回路和中温回路的双控温回路设计和温湿度双闭环控制策略,从硬件、软件两个层面保证了温湿度控制的独立性。为验证该控制方法,设计了地面验证实验系统,除采用冷源车进行最终热量排散与空间环境下载人航天器的辐射器散热方式不同外,其他设计均采用 等效原理。利用地面实验验证系统开展了变控温水平、变控湿水平等工况下的温湿度控制性能测试,结果表明:采用本文所提出的温湿度独立控制方法,可以实现密封舱内温湿度的独立控制,且具有较高的控制精度,温湿度控制精度分别优于±0.5 ℃、±2%RH,解耦控制效果良好。
(References)
[1]Suzuki T, Shubuta S.Design of JEM temperature and humidity control system[C]//4thEuropean Symposium on Space Environmental Control System.Florence, 1991
[2]Marco M, Paolo V.Fuzzy logic algorithm for manned modules temperature and humidity control using EcosimPro[C]//34thInternational Conference on Environmental Systems (ICES).Springs, Colorado, 2004
[3]Reeves D R, Barker R S.Space station temperature and humidity control dynamic analysis[C]//AIAA Space Programs and Technologies Conference.Huntsville, 1994
[4]Tsai Ching-fen, Castro H, Iwohara S.Centrifuge Accommodation Module (CAM) cabin air temperature and humidity control analysis[C]//35thInternational Conference on Environmental Systems (ICES).Rome, Italy, 2005
[5]范宇峰, 黄家荣, 范含林.航天器密封舱湿度控制技术综述[J].航天器工程, 2005, 16(4):89-93 Fan Yufeng, Huang Jiarong, Fan Hanlin.An overview of spacecraft sealed-cabin humidity control technology[J].Spacecraft Engineering, 2005, 16(4):89-93
[6]侯增祺, 胡金刚.航天器热控技术——原理及其应用[M].北京:中国科学出版社, 2007:469-473
[7]Wieland P O.Designing for human presence in space:introduction to environmental control and life support systems, NASA RP-1324[R].Huntsville:NASA Marshall Space Flight Center, 1994:204-205
[8]Jouanne R G, Barker R S.Dew point analysis for Space Station Freedom[C]//ICES 1992.USA:SAE, 1992
[9]曲洪权, 惠卫民.载人航天器舱室温湿度最优预测控制研究[J].系统仿真学报, 2010, 22(1):162-164 Qu Hongquan, Hui Weimin.Optimal predicted control for temperature and humidity control subsystem in manned spacecraft[J].Journal of System Simulation, 2010, 22 (1):162-164
猜你喜欢
疯狂英语·读写版(2023年8期)2023-10-03 14:57:22
载人航天(2022年6期)2023-01-05 05:28:38
中国特种设备安全(2021年8期)2021-02-10 06:04:06
陶瓷学报(2020年2期)2020-10-27 02:16:04
新疆大学学报(自然科学版)(中英文)(2020年2期)2020-07-25 01:40:42
医学新知(2019年4期)2020-01-02 11:03:54
江西建材(2018年2期)2018-04-14 08:00:43
现代检验医学杂志(2015年1期)2015-02-06 01:59:23
西部中医药(2014年6期)2014-03-11 16:07:41
华东理工大学学报(自然科学版)(2014年5期)2014-02-27 13:49:26
