
磁导航巡检机器人运动控制系统设计
2014-12-17 00:35聂鸿宇薛志航
中国测试 2014年1期
聂鸿宇,刘 睿,薛志航
(1.国网四川省电力公司检修公司,四川 成都 610052;2.国网四川省电力科学研究院,四川 成都 610041)
0 引 言
当前变电站巡检主要为人工巡检,该方法效率低、实时性差,并且在恶劣天气下巡检时,巡检工人面临人身危险。随着移动机器人技术的发展,科研人员开始研制能携带检测设备的机器人[1-3]代替人工进行巡检。Sert B等[4]设计了基于激光导航的自动导引小车,济南大学的杨森等[5]设计了一种基于轨线引导的巡检机器人单目视觉导航控制方法,中国科学院沈阳自动化研究所研制一台轨道式巡检机器人[6]。
变电站处于室外,有高电压和强电磁干扰,为确保巡检机器人工作稳定可靠,稳定精确的运动控制和导航显得尤为关键。针对四川省某变电站的实际情况,设计了一台基于双磁传感器导航、差速驱动转向的巡检机器人,推导了其巡线控制算法并研制了样机。
1 变电站巡检机器人的总体结构
根据变电站巡检环境与巡检任务要求,变电站巡检机器人系统主要由底盘驱动系统、机器人巡航定位模块、自动充电模块、嵌入式主控及扩展模块、无线通信模块、锂电池及能源管理模块、双视系统云台和机器人安全保障系统组成,如图1所示。
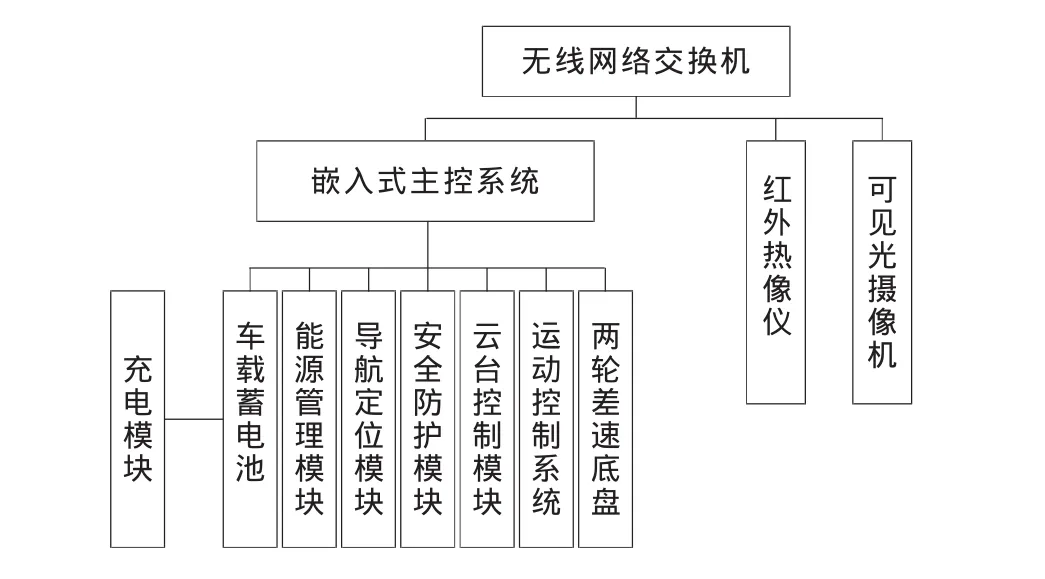
图1 巡检机器人功能模块
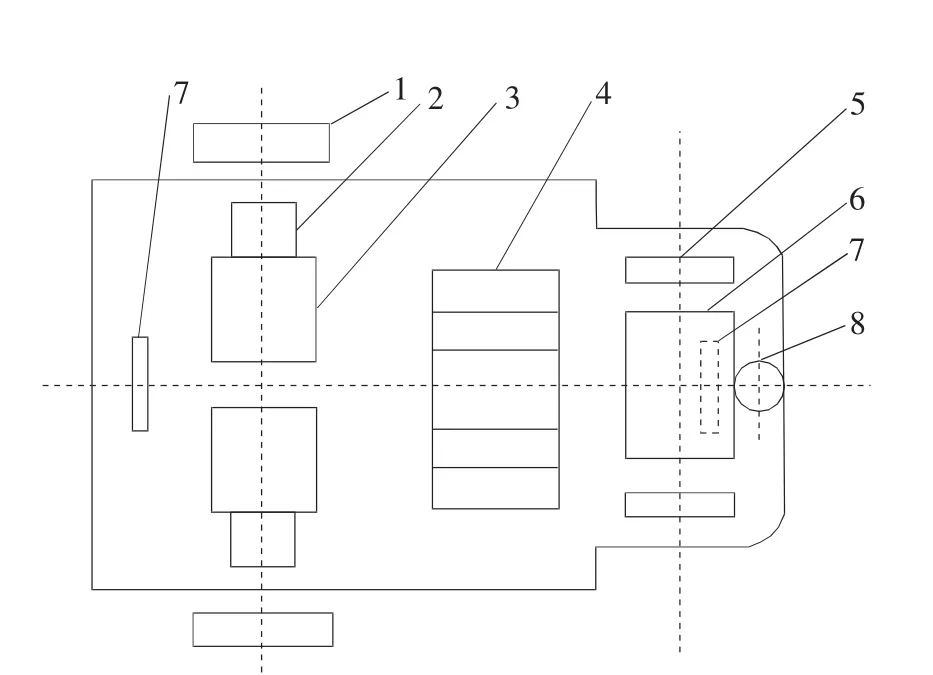
图2 巡检机器人底盘结构
变电站内路面为水泥地,机器人行进的速度为0.4~1m/s。根据巡检机器人的工作环境及机动性需求,设计了如图2所示的底盘。该底盘采用四轮支撑、两轮差速驱动:在底盘的前部安装了两个万向轮5,在底盘的后部安装了两个驱动轮1,通过两驱动轮的轮差速可实现灵活转弯。为了降低机器人上坡和下坡时倾覆的风险,把比较重的部件如蓄电池组4放置在底盘的正中间。底盘的最前端安装有激光雷达8,用来探测机器人前进方向上是否有行人、电线杆等障碍,防止出现碰撞事故。
两驱动轮采用空心可充气胶胎,减轻了车体的重量,加强了减震效果。底盘具有转弯半径小,灵活性强的优点。
在底盘的前端和后端安装有两个磁传感器7,机器人运行时,磁传感器不断感应铺设在巡检路径上的磁条信息。位于磁条垂直上方的采样点感应到磁条信号并输出相应状态,机器人控制系统借此可得到车体轴线与既定巡检路径的偏差,并对驱动轮4的转速进行调节,以保证机器人始终行驶在既定的巡检路径上。磁条是永磁铁,不受环境光线、温度、湿度、天气条件、场地路面的影响;另外,磁导航信号容易收集,故采用此控制方法比较简单。本文设计的系统为双磁传感器导航,在机器人车体前方和后方的底部各安装一个磁传感器。

图3 控制系统硬件组成
2 控制系统
控制系统是巡检机器人系统的核心。在研发和设计控制系统时,重点考虑外设的接口能力、体积、功耗和可靠性。
本机器人采用工业级嵌入式控制器XPAC8734,为接收外部传感器和控制外部设备,还配置32路隔离数字量I/O模块、16路继电器输出模块和CANOpen通信模块。该控制器采用无风扇设计,装载嵌入式操作系统,稳定可靠。
直流电机伺服驱动控制器和直流电动机是机器人运动控制的核心部件,事关整机系统的可靠性,本项目选用以色列ELMO公司生产的军工级直流电机伺服驱动控制器和瑞士MAXON公司生产的直流伺服电机。
机器人控制系统硬件结构如图3所示。
3 巡线算法
巡检机器人会因为车轮打滑等因素造成与预定的导航路径发生偏差。为避免这种现象,可以在发生运动轨迹偏离时,通过实时调整驱动轮的速度,促使两个驱动轮产生速度差,以此保证巡检机器人的正常状态,使小车可按原定轨迹行走。等到传感器发出小车已经恢复到规定路线信号时,就可以继续由控制器来操控车轮的运动速度。
基于上述原理,建立如图4所示的运动模型。图中P点为巡线机器人上的参考点,θ代表机器人的航向角。下面对此巡线机器人做出4点假设:
1)轮胎为刚性,不会产生变形。
2)轮与地面垂直接触,忽略轮宽的影响。
3)运动过程中车轮只作滚动,无滑动现象。

图4 差速转向模型图
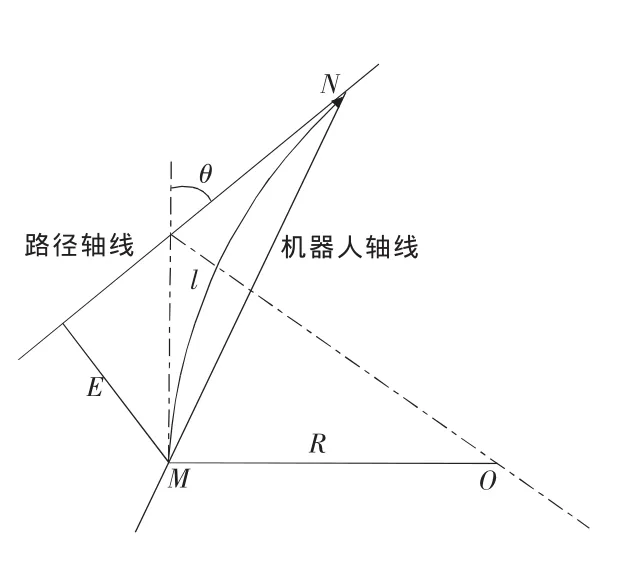
图5 小车运动轨迹模型
4)两个车轮尺寸相同,车轴中心线与车运动方向垂直。
根据上面的假定,小车的位置和状态用向量q=(xp,yp,θ)T表示,小车上的参考点 P 在二维平面上的投影坐标是(xp,yp)。进一步假设:d为两驱动轮之间的轴间距,r为驱动轮半径,M为轴间连线的中心点,它的坐标为(xM,yM);L为参考点P与 M之间的距离,β为直线|PM|与平台中轴线之间的夹角。由图4可得:
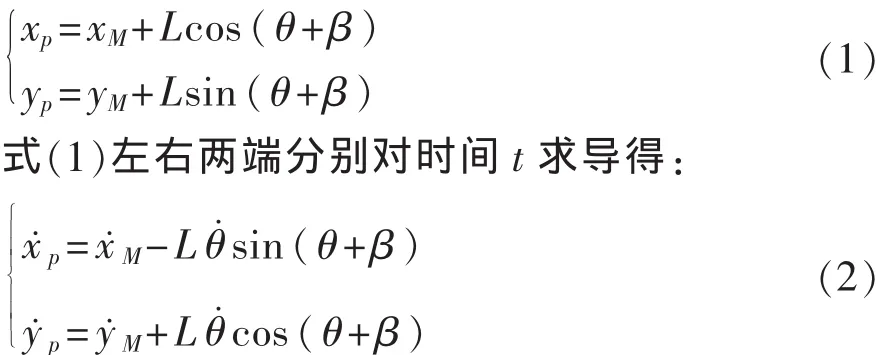
在上述假设前提下,图4所示驱动模型可以简化为居于轴连线中点M处的单轮滚动,则单轮所受的非完整约束为:

由式(2)和式(3)可得:

小车在运行中从头至尾按照约束式(3)或式(4)的条件运动,因此保证了小车的瞬时速度方向和平台朝向始终保持一致。只有控制两个轮子之间的速度差来实现小车方向的改变。
在两轮差速驱动的运动中,当它的瞬时速度方向与小车的前进方向一致时,小车可以仅通过改变两轮的速度差来控制小车运动的方向和大小。由此得出,可以把图4中的巡线机器人相对路径的运动模型简化,如图5所示。
可以发现,巡线机器人上的参考点M与路径轴线N之间的偏距和偏角分别为E和θ。巡线机器人如果想要回到它的理想轨迹,在后面的运动中就必须要避免出现这样的偏差,在众多的路径中,只有沿轨迹1行走才是比较平滑稳定的方式,轨迹1是点M和点N之间的圆弧,点M和点N为切点,R为半径,O为圆心,根据的几何关系可得:

结合式(4)、式(5)可得:

在设定并保持小车速度ν不变的情况下,即ν=(ωRr+ωLr)/2为定值的基础上,按照小车当前状态,将两轮转速差设定为Δω时,小车将沿轨迹1平滑地回到其理想轨迹,所需的时间计算如下:

综上所述,在巡线机器人保持一种固定线速不变的情况下,可以依据小车所产生的偏距E和偏角θ得出左右两轮之间的旋转角速度差值Δω与运动时间t,由此可以实现巡线机器人重返正确的运行轨道。
4 试验研究
为验证本巡检机器人巡线算法的有效性,开展巡线试验。
机器人以不同速度巡线时误差如表1所示,表中E代表误差的平均值。可以看出,随着机器人速度的增大,偏距E的均值在变大,这是因为小车对自身状态的判断需要时间,指令执行机构也需要反应时间,而速度越大,机器人在这段时间内运动的距离越远,则可能导致的偏距E变大,运动不稳定性增强,甚至偏出路径。本文小车的偏距E整体误差较小,运动可靠。
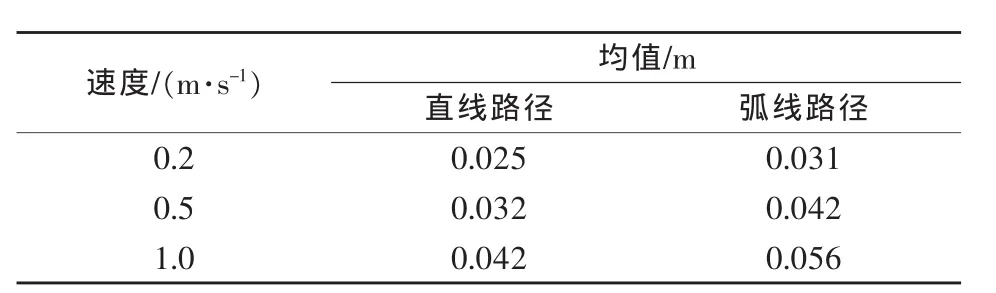
表1 巡线机器人循线误差(偏距E)
5 结束语
研制了一款基于嵌入式车载工控机、双磁导航传感器反馈巡线偏差及双电机差速驱动纠偏的变电站巡检机器人,具有巡线精度高、可靠性好的特点,成功应用于变电站设备巡检。
[1] 史晨红,左敦稳,张国家.基于轨迹控制的AGV运动控制器设计研究[J].机械设计与制造工程,2014(2):7-12.
[2] 武星,楼佩煌,唐敦兵.自动导引车路径跟踪和伺服控制的混合运动控制[J].机械工程学报,2011(3):43-48.
[3] 彭光清,楼佩煌.磁导航AGV模糊控制器的研究[J].工业控制计算机,2012(9):43-44.
[4] Sert B, Maddox J, Veatch P.Laser assisted intelligent guidance for automated guided vehicles[A].Intelligent Vehicles Symposium,1993(93):201-206.
[5] 杨森,董吉文,鲁守银.变电站设备巡检机器人视觉导航方法[J].电网技术,2009(3):11-15.
[6] 王挺.全国首台轨道式变电站巡检机器人投入试运行[J].电气技术,2012(2):88.
猜你喜欢
汽车实用技术(2022年5期)2022-04-02
汽车实用技术(2022年5期)2022-04-02
智慧电力(2022年1期)2022-03-02
科技研究·理论版(2021年4期)2021-09-10
河南电力(2020年5期)2020-05-22
中国新技术新产品(2020年4期)2020-05-05
无人机(2018年1期)2018-07-05
科技创新导报(2016年27期)2017-03-14
山东工业技术(2016年15期)2016-12-01
专用汽车(2016年4期)2016-03-01
