
终端空域尾流间隔缩减研究综述*
2014-12-14 06:02张军峰葛腾腾
交通信息与安全 2014年6期
王 菲 张军峰 葛腾腾
(南京航空航天大学民航学院 南京 210016)
0 引言
尾流是飞机在飞行时由于翼尖处上下表面的空气动力压力差,产生的一对绕着翼尖的闭合涡旋[1]。它是机翼产生升力的伴随产物,通常在飞机起飞时前轮抬起产生,在着陆时前轮接地结束。当飞机进入前面飞机的尾流影响区域时,会导致跟进的飞机产生滚转、俯仰、颠簸、掉高等严重后果。
20世纪70年代前,因为飞机普遍较小,尾流强度也小,尾流对飞行的影响有限。当投入运行的飞机逐渐增大时,特别是波音747投入商业运营后,人们开始意识到尾流对飞行安全的严重影响。国际民用航空组织(International Civil Aviation Organization,ICAO)基于美国联邦航空局(Federal Aviation Administration,FAA)收集的运行数据,将航空器按最大起飞重量分为轻型、中型及重型机,并根据运行条件(目视飞行或仪表飞行),以及使用跑道的情况(单跑道、平行跑道或交叉跑道),制定了1套比较完整的间隔标准,即尾流间隔标准,有助于终端区内的安全运行。
进入21世纪以来,基于实践和经验的尾流间隔标准在确保空中交通安全、有序运行方面继续发挥着重要的作用。然而,由于该间隔标准相对较为保守,没有考虑外部环境(湍流、风)、机型特点(重量、翼展)和操纵性能(速度、转动惯量)等因素的影响,已逐渐成为终端区容量限制的瓶颈[2],造成局部拥堵和飞行延误,这使得缩减尾流间隔变得十分迫切。
通过低旋度尾涡方法或快速衰减涡方法,对航空器翼面结构进行改进,可有效缓解尾流影响,进而缩减尾流间隔[3-5]。Boer与Hoffe[6]提出在翼尖安装活动小翼;Quackenbush,Boschitsc与Bilanin[7]引入二级强度小涡,采用“涡流杠杆”策略实现尾流耗散;然而,上述缩减尾流间隔的效果有限。一方面尾流的消散与输运主要受天气(如风、大气分层、湍流等)因素的影响;另一方面由于尾流产生原理导致无法从根本上消除其影响,而且这种从航空器设计角度实现尾流消除或缓解的方法,往往是以牺牲其他飞行性能为代价。因此,现阶段国内外主要通过避免尾流影响,达到缩减尾流间隔,增强机场容量的目的,其实现途径主要分为2类:①偏置进近程序,着重于后机避开前机的尾流影响区域;②动态尾流预测,致力于将前机尾流对后机的影响控制在可容忍的范围之内。
1 基于偏置进近程序的尾流间隔缩减技术
同步偏置仪表进近(simultaneous offset instrumented approach,SOIA)是FAA 为旧金山国际机场开发的进近程序[8](见图1),该程序主要应用于跑道间距为228.6~3000.3 m(750~3 000ft)之间的近距平行跑道。
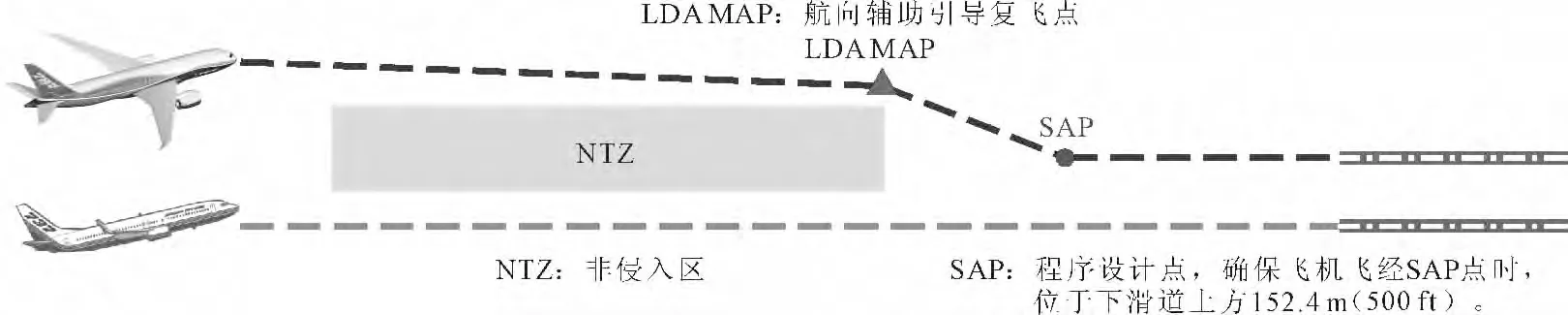
图1 同步偏置仪表进近程序俯视图Fig.1 The vertical view of synchronous offset instrument approach procedure
同步偏置仪表进近程序要求在1个跑道上安装仪表着陆系统/精密跑道监测系统,另一跑道的下滑道上安装偏置航向信标定向装置。最后进近空域包含由2个精密跑道监测控制器监测的无侵入区域。为了减小跑道的横向间隔,监测控制器需要配备高精度二次雷达和高分辨率雷达显示器。在同步偏置仪表进近程序中,LDA(localizer-type directional aid)飞机要求在ILS(instrument landing system)飞机之后到达LDA MAP(localizer-type directional aid missed approach point),并负责与ILS 飞机保持安全间隔。当航空器下降至LDA MAP点转为目视机动,在距地面152.4m(500ft)处对准跑道完成进近。
在正常天气条件下,旧金山国际机场的2条跑道每小时大约有60次航班到达。遇到较低的云高和有雾天气会导致其中1条跑道不能着陆,即到达率仅为30 架/h。SOIA 程序可以使旧金山机场在487.68m(1 600ft)云高,6 437.376m(4mile)能见度条件下,保持38架/h的到达率。即使遭遇恶劣天气,仍可提高跑道利用率,容量改进效果明显。然而,该程序需配备精密的场面监视雷达,并需要对飞行员与管制员进行资格审查和培训,机场与航空公司的成本会有所增加。
错列进近程序(staggered approach procedure,SGAP),如图2所示,由德国空中导航服务局和汉莎航空公司联合开发,并在法兰克福机场成功应用[9-10]。

图2 错列进近程序侧视图Fig.2 The side view of staggered approach procedure
前机为重型机,使用常规跑道入口,其产生的尾流沿着飞行轨迹向后下方运动。增加与后机的纵向距离可有效保障后机避开前机的尾流危险区。后机为轻型机,使用错列跑道入口。由于跑道入口内移,航空器间可保持垂直间隔,实现错列进近。
该程序在法兰克福机场的应用表明,当包含A380机型时,SGAP比传统进近模式(如ILS)的容量增强了18%。SGAP 增加了仪表气象条件下的进场容量,缩短了目视气象条件与仪表气象条件下进场容量的差距,使得在大部分天气条件下,进场容量保持稳定。就航班延误而言,SGAP可使机场和航空公司的运行更加合理、可预料。然而,运行错列进近程序需要机场跑道以及灯光系统具备双入口运行条件,在跑道入口内移1 500 m 处安装独立的导航装置和进近灯光系统(基于ICAO 的标准,但与传统的标识和灯光有显著易辨识的区别),且仅允许在仪表气象条件下运行[11]。同时,SGAP需要对飞行员与管制员进行足够的培训以及安全资格审查。
2 基于动态预测的尾流间隔缩减技术
由于偏置进近程序的运行限制,导致其难以广泛应用。因此,目前缩减尾流间隔研究的热点集中于动态尾流间隔领域。动态尾流间隔主要通过预测前机尾流的位置、强度,将后机遭遇尾流的风险控制在可容忍的范围之内,从而达到缩减尾流间隔、提高机场容量的目的。
2.1 动态尾流间隔缩减系统
2.1.1 尾流间隔系统
尾流间隔系统(aircraft vortex spacing system,AVOSS)[12]是美国国家航空航天局(national aeronautics and space administration,NASA)在多年研究尾流特性的基础上,结合大量实测数据,研制成功该系统。该系统分为天气子系统、尾涡消散预测子系统、尾流探测子系统、子系统整合和空中交通管制人机界面。该系统在达拉斯机场进行多次试验,可有效缩短单跑道着陆间隔,容量提高6%,延误降低约40%[13]。然而,该系统所需设备多,质量要求高,系统的成本相对较高。
2.1.2 尾流诱导风险模型
尾流诱导风险模型(wake vortex induced risk assessment,WAVIR)[14],由荷兰国家航空航天实验室(national aerospace laboratory,NLR)设计开发。该模型包含了尾流评估模块与尾流遭遇模块,可以实现不同环境条件下,不同尾流间隔的安全评估仿真。WAVIR 不仅能够提升跑道容量:单跑道离场容量增加2%[15],单跑道进场容量增加5%[16];而且可以在未来实施管制新技术与新方法时,确定安全的尾流间隔。
2.1.3 尾流预测与监控系统
尾流预测与监控系统(wirbelschleppen-vorhersage- und- beobachtungs system,WSVBS)[17],由德国宇航中心(deutsches zentrum für luft-und raumfahrt,DLR)设计开发[18],系统结构如图3所示,包括天气预报、尾流预测、安全区域预测、尾流探测等子系统。WSVBS 可以依据特定的天气条件与尾流特性,在不影响安全的前提下动态调节尾流间隔。该系统在法兰克福机场得到了成功应用,使机场容量增强3%以上;该系统也为东京国际机场的曲线进近程序提供依据,使其容量提升约12%[19]。
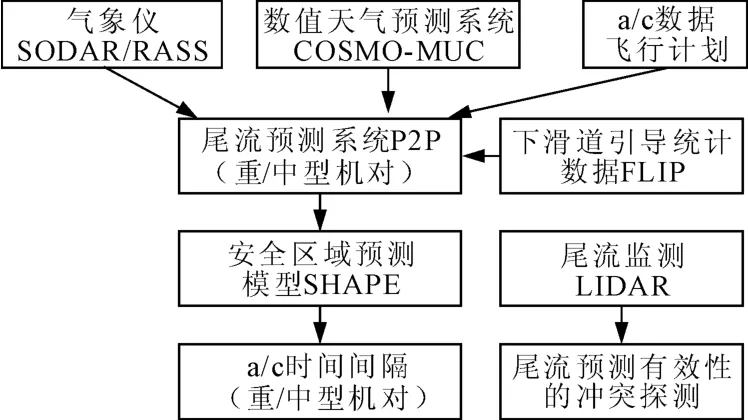
图3 WSVBS操作流程图Fig.3 The WSVBS operation flow chart
2.1.4 航空器尾流情境仿真模型
航空器尾流情境仿真模型(wakescene)[20]由德国宇航中心基于Matlab开发设计,包含混合交通、飞行轨迹、气象数据、尾涡演变和潜在危险区域5个模块,系统结构见图4。通过模拟控制模块可选择前机与后机的类型,飞机速度模型提供前机与后机速度以及质量,气象数据库提供风速、风向、空气密度、温度等数据,尾流模型模拟尾涡涡核轨迹、涡核半径以及尾涡轴的形状,危险区域模型评估尾流遭遇的严重性。Holz pfel利用该模型分别研究了进近着陆[20]与起飞离场[21]的尾流遭遇问题,旨在提高繁忙机场的容量水平[20]。
2.1.5 尾流4D 模型(WAKE4D)
尾流4D 模型(WAKE4D)[22]由比利时鲁尔大学(Universite Catholique de Louvain,UCL)开发的“三维空间+时间”尾流预测模型,该模型可模拟航空器在既定飞行路线上尾流传播与衰减。WAKE4D 模型的核心为确定尾流模型与概率尾流模型,不仅可以用于离线研究(例如,遭遇尾流或者风险评估研究),也能够作为实时运行的一部分(例如,基于地面的尾流咨询系统,它可作为机载尾流预测和告警系统)。而且,尾流4D 模型在欧控(Eurocontrol)基于时间间隔(time based separation,TBS)[23]与独立于尾流进离场运行(wake independent departure and arrival operations,WIDAO)[24]中都得到了成功应用。
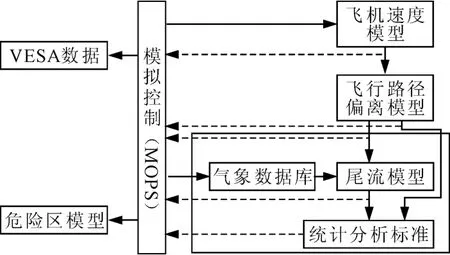
图4 WakeScene操作流程图Fig.4 The WakeScene operation flow chart
2.2 动态尾流间隔研究进展
上述动态预测尾流间隔缩减系统中,仅美国国家航空航天局(NASA)研制的尾流间隔系统(AVOSS)以及德国宇航中心(DLR)设计开发的尾流预测与监控系统(WSVBS)获得了成功应用,其他诸如尾流诱导风险模型(WAVIR)、航空器尾流情境仿真模型(WakeScene)、尾流4D 模型(WAKE4D)仅作为仿真模型用以实现管制新技术与管制新理念的验证。
虽然AVOSS以及WSVBS分别应用于达拉斯机场和法兰克福机场,但目前国际上依旧使用ICAO 公布的尾流间隔标准,动态尾流间隔技术仍然停留在验证阶段,未能获得广泛推广。然而,FAA 和Eurocontrol一直致力于动态尾流间隔的研究,主要集中于如下2个方面:预测尾流与遭遇尾流。
预测尾流的准确性与实时性是动态尾流间隔的基础,德国宇航中心(DLR)和比利时鲁尔大学(UCL)在尾流预测建模方面做出了卓有成效的贡献:德国宇航中心的Holz pfel提出的两阶段尾流随机消散模型[25]应用较为广泛;通过进一步考察侧风、地面效应、大气湍流等对尾流演变的影响,Holz pfel提出了相应的改进模型[26-28];同时Holz pfel还深入研究了飞机参数、气象参数等对尾流特性的影响[29],发现风、热分层、湍流、位置、质量、顺翼展方向的载荷数等与尾流特性相关性较大,且影响程度依次递减,为尾流预测的精确建模提供参考。比利时鲁尔大学的Winckelmans、Visscher与Lonfils提出的确定型/随机型尾流输运与消散模型[30]是尾流预测建模的另1 个通用模型,结合了侧风、风切变、湍流、分层以及地面效应对尾流的影响。Visscher、Lonfils与Winckelmans在该模型的基础上提出近地面尾流特性预测快速(消散)模型[31],并与确定型尾流模型相结合,实时预测飞机尾流在环境气象条件不断变化的情况下的时空演化规律。还有许多研究者在上述研究的基础上,提出了相应的改进模型[32-35]。然而,一味地追求尾流预测模型的精确性并不可取,导致模型愈发复杂,其影响因素错综复杂、实时预测性能下降。因此,目前欧美在尾流预测的研究中,其重心已从预测模型的构建转向探测技术与手段的转变,如选择地基或机载脉冲激光雷达作为主要的探测设备[36]。
遭遇尾流的安全性评价则是动态尾流间隔的关键,其主要实现方法分为2种:其一是采用仿真评估工具,空客公司(Airbus)通过尾流遭遇严重性评估(vortex encounter severity assessment,VESA)软件包[37-38]在六自由度飞行模拟器上建立模型来研究遭遇尾流后飞机的响应问题,评估遭遇尾流的严重性。Rafi与Steck 基于MATLAB/Simulink 环境研发出三维、双芯尾涡模型[39],提出了基于MARC(model reference adaptive control)飞行控制系统六自由度通用航空模型扰动的包络保护方案,增加飞机对扰动的响应。周彬等利用尾流保守被动模型对尾流进行实时仿真,通过分析大气环境中风速对为尾流运动的影响,发现当侧向风速为1.0~3.0m/s时是最危险的[40]。Fan等使用不同飞行条件下的数据,利用尾流遭遇模型(wake encounter model,WEM)产生不同类别飞机的尾流区域[41]。其二是基于模拟 机验证,20世纪90年代后期,FAA 与波音公司(Boeing)在B727-200模拟机上进行了尾流遭遇试验,使飞行员能熟悉尾流的危险、以及遭遇尾流后的操作响应。Schwarz与Hahn提出了简化危险区域(simplified hazard areas,SHA)方案[42],引入滚转控制 率(roll control ratio,RCR),根据前机参数以及天气状况,估算安全区域。该方案在研究尾流遭遇与响应,以期在确保安全的前提下提高机场容量水平得到广泛应用[43-44]。Schwarz与Hahn 对该方案进行全飞行模拟研究[45],并将自动驾驶仪作为前馈控制模块引入[46],验证SHA 方案。目前,FAA 和Euro-Control主要研究如何使用飞行数据记录仪(flight data recorder,FDR)数据,分析和研究遭遇尾流的安全性评价问题,并将此作为上述2种方案的重要补充。
3 结束语
缩小尾流间隔标准,能够有效提高机场跑道容量,从而缓解目前的空域拥堵与延误频繁的问题。对于空管运行而言,基于动态尾流间隔是实现尾流间隔缩减的最为有效的手段,其核心在于尾流的预测与遭遇评估。未来的动态尾流间隔研究主要集中于以下几个方面。
1)紧扣未来空管的基于轨迹运行(trajectory based operation,TBO)理念,将基于距离的尾流间隔标准逐步向基于时间的尾流间隔标准过渡。
2)不仅仅研究与开发地面的尾流预测与探测工具与技术,还要发展机载的相关尾流预测与探测工具,最终实现空中间隔的自主保持。
3)联合进场管理(arrival management,AMAN)、离场管理(departure management,DMAN)、点汇聚(point merger system,PMS)等先进运行工具,进一步提高空域容量,实现空中交通流的安全、高效运行。
[1]Gerz T,Holz pfel F,Darracq D.Commercial aircraft wake vortices[J].Progress in Aerospace Sciences,2002,38(3):181-208.
[2]徐肖豪,王洁宁,张 鹏.机场及终端区仿真优化系统建模及实现[J].交通信息与安全,2009(5):135-140.Xu Xiaohao,Wang Jiening,Zhang Peng.Modeling and implementation of airport terminal area simulation optimization system[J].Journal of Transport Information and Safety,2009(5):135-140.(in Chinese).
[3]Durston D A,Walker S M,Driver D M,et al.Wake vortex alleviation flow-field studies[J].Journal of Aircraft,2005,42(4):894-907.
[4]Haverkamp S,Neuwerth G,Jacob D.Active &passive vortex wake mitigation using control surface[J].Aerospace Science and Technology,2005,9(1):5-18.
[5]Voss G,Gerz T,Baumann R.Wake vortex alleviation by differential flap setting and oscillating flap setting:a flight test[C]∥27th AIAA Applied Aerodynamics Conference.San Antonio,USA:AIAA,2009.
[6]Boer M F,Hoffe A C.Method for reducing in fligt wake vortices and an aircraft wingtip arrangement used in such method:U.S,13/514,105[P].2013-01-03.
[7]Quackenbush T R,Boschitsch A H,Bilanin A J.Computational and experimental studies in multipair wake vortex instabilities[C]∥31stAIAA Applied Aerodynamics Conference.San Diego,USA:AIAA,2013.
[8]FAA.Aeronautical Information Manual:Offcial guide to basic fight information and atc procedures[R].Washington DC,USA:Federal Aviation Administration,2006.
[9]Huhnold M,Kulikow A,Haugg E,et al.Realtime simulation studies concerning the operational aspects of two landing thresholds on one runway at frankfurt[C]∥Proceedings of the 25th International Congress on the Aeronautical Sciences,Hamburg,Germany:Springer Berlin Heidelberg,2006.
[10]Janic M.Modelling the capacity of closely-spaced parallel runways using innovative approach procedures[J].Transportation Research Part C:Emerging Technologies,2008,16(6):704-730.
[11]徐肖豪,赵鸿盛,王振宇.尾流间隔缩减综述[J].航空学报,2010.31(4):655-662.Xu Xiaohao,Zhao Hongsheng,Wang Zhenyu.Overview of wake vortex separation reduction systems[J].Acta Aeronautica Et Astronautica Sinica,2010,31(4):655-772.(in Chinese).
[12]Hinton D A,Charnock J K,Bagwell D R.Design of an aircraft vortex spacing system for airport capacity improvement[C]∥38th Aerospace Sciences Meeting & Exhibit,Reno,NV,USA:AIAA,2000.
[13]Rutishauser D,Lohr G,Hamilton D.Wake vortex advisory system concept of operations[M].Hampton,VA,USA:Langley Research Center,2003.
[14]Baren V,Speijker J.WAVIR user manual[R].Netherlands:National Aerospace Laboratory,2004.
[15]Speijker J,Vidal A,Cooke R M.Safety assessment of atc-wake single runway departures[R].Netherlands:National Aerospace Laboratory,2006.
[16]Speijker J,Vidal A,Cooke R M.Safety assessment of a single runway arrival procedure for aircraft equipped with a wv detection,warning and avoidance system[R].Netherlands:National Aerospace Laboratory,2006.
[17]Holz pfel F,Gerz T.The wake vortex prediction and monitoring system WSVBS-part 1:design[C]∥1st CEAS European Air and Space Conference,Berlin,Germany:DGLR,2007.
[18]Gerz T,Holz pfel F,et al.The wake vortex prediction and monitoring system wsvbs?part ii:performance and atc integration at frankfurt airport[C]∥1st CEAS European Air and Space Conference,Berlin,Germany:DGLR,2007.
[19]Matayoshi N,Okuno Y,Sugiura M,et al.Airport terminal traffic simulation applying reduced wake vortex separation[C]∥10th AIAA Aviation Technology,Integration,and Operations Conference.Ft.Worth,Texas,USA:AIAA,2010.
[20]Holz pfel F,Frech M,Gerz T,et al.Aircraft wake vortex scenarios simulation package-wakescene[J].Aerospace Science &Technology,2009,13(1):1-11.
[21]Holz pfel F,Kladetzke J,Amelsberg S,et al.Aircraft wake vortex scenarios simulation for take-off and departure[J].Journal of Aircraft,2009,46(2):713-717.
[22]Visscher I D,Winckelmans G,Lonfils T.The WAKE4Dsimulation platform for predicting aircraft wake vortex transport and decay:description and examples of application[C]∥AIAA Atmospheric and Space Environments Conference,Toronto,Ontario Canada:AIAA,2010.
[23]Bonnier M,Freville E.Results from the december 2007-time based separation real time simulation exercices[R].Paris,France:EUROCONTROL Experimental Centre,2008.
[24]Eriksen P,Trève V,Rooseleer F.Principles and guidance for wake vortex encounter risk assessment as used in paris CDG wake independent departure and arrival operations safety case[R].Brussels,Belgium:EUROCONTROL,2010.
[25]Holz pfel F.Probabilistic two-phase wake vortex decay and transport model[J].Journal of Aircraft,2003,40(2):323-331.
[26]Holz?pfel F,Robins R E.Probabilistic twophase aircraft wake-vortex model:application and assessment[J].Journal of Aircraft,2004,41(5):1117-1126.
[27]Holz pfel F.Probabilistic two-phase aircraft wakevortex model:further development and assessment[J].Journal of Aircraft,2006,43(3):700-708.
[28]Holz pfel F,M Steen.Aircraft wake-vortex evolution in ground proximity:analysis and parameterization[J].AIAA Journal,2007,45(1):218-227.
[29]Holz pfel F.Sensitivity analysis of the effects of aircraft and environmental parameters on aircraft wake vortex trajectories and lifetimes[C]∥51st AIAA Aerospace Sciences Meeting.Ft.Worth,Texas,USA:AIAA,2013.
[30]Winckelmans G,Visscher I D,Lon?ls T.UCL operational tools for predicting aircraft wake vortex transport and decay:the deterministic/probabilistic wake vortex models(DVM/PVM)and the WAKE4Dplatform[C]∥AIAA Atmospheric and Space Environments Conference,Toronto,Ontario Canada:AIAA,2010.
[31]Visscher I D,Lonfils T,Winckelmans G.Fasttime modeling of ground effects on wake vortex transport and decay [J].Journal of Aircraft,2013,50(5):1514-1525.
[32]Proctor F H,Ahmad N N,Switzer G F,et al.Three-phased wake vortex decay [C]∥AIAA Atmospheric and Space Environments Conference,Toronto,Ontario Canada:AIAA,2010.
[33]Switzer G F,Proctor F H,Ahmad N N,et al.An improved wake vortex tracking algorithm for multiple aircraft[C]∥AIAA Atmospheric and Space Environments Conference,Toronto,Ontario Canada:AIAA,2010.
[34]张兆宁,张 彬.纵向尾流间隔计算方法研究[J].中国民航大学学报,2010,28(5):10-12.Zhang Zhaoning,Zhang Bin.Calculation of certical vortex separation[J].Journal of Civil Aviation University of China,2010,28(5):10-12.(in Chinese).
[35]徐肖豪,赵鸿盛,杨传森,等.飞行进近中尾流的大涡数值模拟[J].南京航空航天大学学报,2010,42(2):179-184.Xu Xiaohao,Zhao Hongsheng,Yang Chuansen,et al.Large eddy simulation of wake vortex during approach[J].Journal of Nanjing University of Aeronautics & A stronautics,2010,42(2):179-184.(in Chinese).
[36]Barbaresco F.Airport radar monitoring of wake vortex in all weather conditions[C]∥7th European Radar Conference,Paris,France:IEEE,2010.
[37]Luckner R,H?hne G,Fuhrmann M.Hazard criteria for wake vortex encounters during approach[J].Aerospace Science & Technology,2004,8(8):673-687.
[38]H hne G,Luckner R,Fuhrmann M.Critical wake vortex encounter scenarios[J].Aerospace Science&Technology,2004,8(8):689-701.
[39]Rafi M,Steck J E.Response and recovery of an MRAC advanced flight control system to wake vortex encounters[C]∥AIAA Guidance,Navigation,and Control Conference and Exhibit,Boston,MA,USA:AIAA,2013.
[40]周 彬,王雪松,王 涛,等.侧向风速对飞机尾流运动的影响[J].航空学报,2009,30(5):773-779.Zhou Bin,Wang Xuesong,Wang Tao,et al.Influence of crosswind speeds on aircraft wake vortex movement[J].Acta Aeronautica Et Astronautica Sinica,2009,30(5):773-779.(in Chinese).
[41]Fan Z,Schroeder N,Swol D,et al.Potential wake turbulence encounters analysis in current and NextGen flight operations[C]∥Integrated Communications Navigation and Surveillance Conference,Herndon,VA,USA:IEEE,2013.
[42]Schwarz C,Hahn K U.Simplified hazard areas for wake vortex encounter avoidance[C]∥AIAA Atmospheric Flight Mechanics Conference,Kissimmee,Florida,USA:AIAA,2005.
[43]Hahn K U,Schwarz C,Friehmelt H.Wake vortex avoidance versus landing capacity[C]∥AIAA Guidance,Navigation,and Control Conference and Exhibit,Keystone,Colorado,USA:AIAA,2006.
[44]Hahn K U,Schwarz C,Friehmelt H.Safe limits for wake vortex penetration[C]∥AIAA Guidance,Navigation and Control Conference and Exhibit,Hilton Head,South Carolina,USA:AIAA,2007.
[45]Schwarz C W,Hahn K U.Full-flight simulator study for wake vortex hazard area investigation[J].Aerospace Science & Technology,2006,10(2):136-143.
[46]Schwarz C,Hahn K U.Automated pilot assistance for wake vortex encounters[J].Aerospace Science and Technology,2010,15(5):416-421.
猜你喜欢
数学小灵通(1-2年级)(2020年11期)2020-12-28
好孩子画报(2019年6期)2019-06-30
小学生学习指导(低年级)(2019年3期)2019-04-22
创新作文(小学版)(2018年13期)2018-11-22
新高考(英语进阶)(2017年9期)2017-11-07
雷达学报(2017年6期)2017-03-26
天津大学学报(自然科学与工程技术版)(2015年10期)2015-12-29
舰船科学技术(2015年8期)2015-02-27
读写算·小学低年级(2014年4期)2014-07-24
长江科学院院报(2010年10期)2010-09-05
