
航路网络规划技术研究综述*
2014-12-14 06:02王世锦公言会郦晴云
交通信息与安全 2014年6期
王世锦 公言会 郦晴云
(南京航空航天大学民航学院 南京 210016)
0 引言
随着航空业的迅猛发展,空中交通流量和安全保障压力日益增大。航路网络是实现空中交通的物理空间,交通流的安全高效流动和交通运输成本主要取决于航路网络结构。航路网络的科学规划是优化空域资源、提高空域容量、突破空中交通发展瓶颈的有效手段。
鉴于此,各航空发达国家和组织都非常重视航路网络规划。美国FAA 于20 世纪末提出了“Nextgen”计划,主旨是建立自由飞行空域和“高速航路”网[1]。欧洲分别于2000年和2005年提出Free-Flight和“高速航路”理念,到2013年建议为自由航路与航路网络划分空域,创建新航线。澳大利亚在1993年制定了《航路建设原则》以及2002年成立了进行空域规划的国家机构(AGS)。ICAO 面向各成员国颁布了航路网络规划技术策略。中国于2007年给出了航路网络建设的实施策略和方案[2],2012年提出构建以国际枢纽机场和国内干线机场为骨干,支线和通勤机场为补充的国内航空网络[3]。
1 航路网络规划技术
目前研究从规划程度的角度可分为3类:全局航路网络规划、局部航路网络规划和高速航路规划。全局航路网络规划是摒弃现有航路网络,对某个区域或国家航路航线做出全新的布局规划;局部航路网络规划是对现行航路网络采用最优化问题解决方法进行航路网络节点布局优化;高速航路规划是进行远程、单向、无交叉的高速航路和匝口的布局规划。
1.1 局部航路网络规划
中国空域范围大,且各地发展不平衡,使得形成于20世纪五六十年代基础上的航路网络交通流严重分配不均,制约了航空业的快速发展。以我国为首的相关专家学者借鉴公路网络规划技术采用最优化问题求解思想,进行了局部航路网络规划技术的研究。
最优化问题包括以下3个要点:①优化目标;②约束条件;③求解算法。其中①和②又合称为最优化数学模型,其一般向量表达式为

其中,X=(x1,x2,…,xn)T;G(X)=[g1(X),g2(X),…,gm(X)]T;H(X)=[h1(X),h2(X),…,hk(X)]T。
1.1.1 局部航路网络规划模型的目标函数
局部航路网络规划模型的目标函数有3种形式:单目标函数、多目标函数以及双层规划目标函数,见式(3)~(7)。单目标函数式(3)是指从管理层考虑运行成本最低,也是3种形式的核心,多目标函数及双层规划目标函数式(4)~(6)均是该单目标函数思想的扩展。
单目标函数:

多目标函数:

双层目标函数:


式(3)中航段飞行流量f乘以航段长d累加求和最小表示航路网络运行成本最小化;式(4)中航路网络节点每小时平均冲突次数c累加最小表示航路网络安全性最好;式(5)采用航路网络节点介数标准差SDB最小化,达到空域容量/通行能力最大化的目的;式(6)是指管制员工作负荷W累计求和最小。
航路网络多目标规划思想源于文献[4]兼顾管制约束和航空公司运行成本最小化的航路规划。虽然,Mehadhebi将实际连续规划不可微的交叉点规划问题简化为可微的问题,并且其方法只有在空中交通流量密度比较低时才能得到满意的结果。但是,其多目标优化思想沿用至今。
式(4)中每小时平均冲突次数ci源于文献[5-7],美国斯坦福研究院的M.W.Siddiquee提出的航路网络设计的量化指标-每小时平均冲突次数。该目标函数与ICAO 描述的安全性内涵有一定区别,也忽略了单一网络节点冲突和通行问题(如图1中P点),使得某些节点会很快达到通行能力上限,从而使整个航路网络陷入拥堵,因此文献[8]将此目标函数改为约束条件,见式(7)。
式(5)源于文献[9],以复杂网络中介数反映相应节点或者边在整个网络中的作用和影响力。网络节点介数标准差最小化(即近似均分节点重要度)重点提升整个航路网络的容量/通行能力。该目标函数忽略了网络节点重要度不可均分的问题。首先,由于地理、经济、人文等原因本身航路点就存在重要性的差别,其次,均分航路点重要性后,怀柔、天镇等繁忙航路点由于其重要性当航段连接度的降低时,此类航路点的负荷容易迅速增加、达到饱和、陷入拥堵。
式(6)标志着航路网络规划采用了双层目标规划技术[10],表达了管理层的另1 个运行因素:工作负荷最低。式中W是流量f和采用BPR函数计算的航路段阻抗t的函数。BPR是美国公路局对大量地面路段进行交通调查,回归分析得到的函数,其是否可表征航路段阻抗还有待证明。
1.1.2 局部航路网络规划模型的约束条件
局部航路网络规划的约束条件主要有2类:安全性约束和通行能力约束。安全性约束包括“三区”约束和节点每小时平均冲突次数约束2个部分,见式(7)~(9);通行能力约束包括需求、通行能力、管制员负荷约束3部分,如式(10)~(12)所示。
局部航路网络规划的约束条件有3种形式:节点每小时平均冲突次数约束,如式(7)从微观角度考虑单个节点的潜在冲突数;“三区”约束如式(8)~(9);以及式(10)~(12)分别表示需求、通行能力、管制员负荷约束。
1)安全性约束。
(1)节点每小时平均冲突次数约束:

(2)三区约束:

2)通行能力约束。
(1)需求约束:

(2)通行能力约束:

(3)管制员负荷约束:

式(7)从微观角度考虑单个节点的潜在冲突数,但是目前仅有文献[11]给出该冲突阈值cmax取值。
式(8)规避“三区”链接图建模约束源于文献[12],反映在航路路径选择必须在链接图规划建模(如图3所示)中的“三区”链接线上,以满足“三区”避让要求。
ARN 链接图建模要求所有的航线选择必须在链接图规划建模中的“三区”链接线上,因此所有的航线都不会穿过“三区”。但是,其“三区”规避模型中假设所有的“三区”都是凸边形,若出现凹边形“三区”此模型的适用性降低(如图1中三角形区域A具有不可达性)。
式(9)规避“三区”元胞自动机建模约束源于文献[11],表示航路网络规划中节点以及节点连接成的航段不可穿越“三区”,航路网络规划中将“三区”网格化,区分与非“三区”空域(见图2),可实现航路网络规划中凹形、圆形、扇形等诸多不规则“三区”的规避。
式(10)需求约束(ARN 规划后网络容量[21]要增加),式(11)容量约束(未来流量分配后,航段流量小于容量)、式(12)管制员负荷约束均源于文献[16]。但是,Y.Sheffi在其书中指出该路阻函数中的C并非路段的通行能力,因此BPR 是否可在航路网络规划表示阻抗有待探究。
在海上油田依托式开发研究过程中,需要对周边各种油品掺混外输方案进行研究,从研究效率和经济性角度来说,寻找一种适合于本油田的黏度预测模型较一一开展掺混实验更加可取。首先调研了国内外油品掺混黏度预测模型,然后以渤海垦利油田群中新开发稠油油田原油为基础,掺混周围可能的3种稀油进行预测,并将预测结果与实验值进行比较分析,认为:

图1 链接图建模示意图Fig.1 Schematic diagram of the link graph modeling

图2 元胞自动机规避“三区”示意图Fig.2 Schematic diagram of cellular automata to avoid"three areas"
1.1.3 局部航路网络规划模型的求解算法
目前航路网络规划模型的求解主要采用了图论、人工智能理论以及元胞自动机理论中的相应算法来实现。
文献[8]采用图论中的Voronoi图针对航路点划设反映航路点密度的多边形空域,通过反复合并和移动航路点完成航路网络优化。受算法特点限制,该算法对大规模问题研究存在局限性。
航路网络规划中基于人工智能理论的模型求解算法主要是指遗传类算法,文献[12]采用遗传算法求解目标函数为式(3)~(4),约束条件为式(11)的多目标航路网络规划模型;文献[13]采用粒子群结合Floyd-Walsh 求解目标函数为式(3)~(4)的航路网格规划,文献[8,14]分别用加权随机分组策略的协作协进化算法和差分进化算法求解了目标函数为式(3),约束条件为式(12)的航路网络规划模型。虽然此类算法对大规模问题研究具有一定优越性,但是此类算法容易陷入早熟,解受算法参数影响较大、稳定性差。
文献[11]采用元胞自动机算法求解目标函数为式(3)约束条件为式(10)和式(12)的航路网络规划模型,元胞自动机模型(算法)难点在与规则制定,但是文献[12]中元胞自动机演化规则可否用于大规模航路网络规划有待探究。
1.2 全局航路网络规划
全局航路网络规划主要是指是基于无扇区空中交通管理运行理念,采用经纬网格覆盖待规划区域,不断弯曲网格以获得现实可行最优航路网络设计方案。
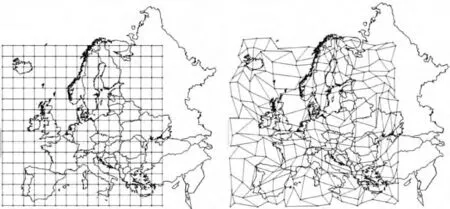
图3 ARN 设计示意图Fig.3 Schematic diagram of ARN design
2010年,文献[19]分别对比了无扇区空域管理和现行空域管理体制下的空中交通管制员的工作效率、飞行潜在冲突、空域利用情况,提出了一些管制员间协调工作以及冲突避让的建议。
虽然“无扇区”空域管理理念不符合空管实际运行,但是,其研究为航路网络规划研究开拓了一种新的思路。
1.3 高速航路
为从根本上扩大航路网络容量、提升运行效率,航空发达国家提出了新型的航路结构——“高速航路”。“高速航路”是由航道、高度层和匝口构成的使用特殊规则隔离的高高度狭长的空域结构,它与传统空域在指定的匝口区域相连,其功能与高速公路类似,主要用于航空器干线飞行和远程巡航。
1)高速航道的结构设计。美国FAA 于1998年在Nextgen 设想中提出了建立“高速航路”网。自2003年经过多年的不断研究,美国“高速航路”的研究经历了由动态空域超级扇区到大容量管状扇区,再到动态多轨航路(DMA)的转变(文献[20-22]),2008年描述了成熟的DMA 模式:每条航路中有多个航道,各航道上的航空器可以通过左右机动超越前方航空器,方向相反的航空器位于不同的高度层,见图4。DMA 航路高度层的3种设置方案见图5。2009年文献[23]在考虑当前空中交通场景和未来航空器自发保持间隔的性能的情况下,将高速航路网络作为1个重建航线结构的可行方案来研究。2010年文献[24]提出航路走廊的初步设计和需要考虑的重要因素。
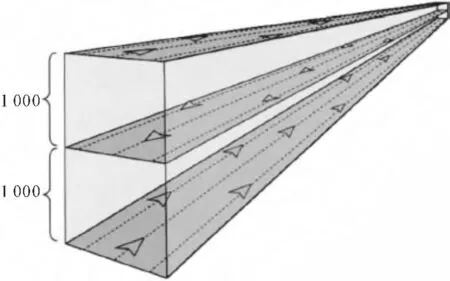
图4 动态多轨航路(DMA)示意图Fig.4 Schematic diagram of DMA

图5 一般航路和高速航路的高度层设置方案Fig.5 Flight level arranged scheme for the general route and high-speed airway
1999年和2000年文献[25-26]在欧洲单一天空构想下提出了高速航路和自由航路的理念;2004年提出了TALC(Tube Advanced Lane Control);2005年欧洲定义了Freeways,即具有特殊规则的独立的高海拔空域,由几条具有安全间隔的同1个方向航线组成,相反方向的交通流占据的是1条平行航路,并设计了涵盖以Europe为中心的包含9个世界最繁忙机场的2条高速航路,分别是沿东南西北运行的红色Freeway和沿西南东北走廊运行的蓝色Freeway,见图6所示,高速层的设置见图7所示。
中国南京航空航天大学的辛正伟于2013年描述了“高速航路”的路径、结构(包括航道、高度层、匝口)的设置理论,明确高速ARN 设计详细步骤和流程[14]。
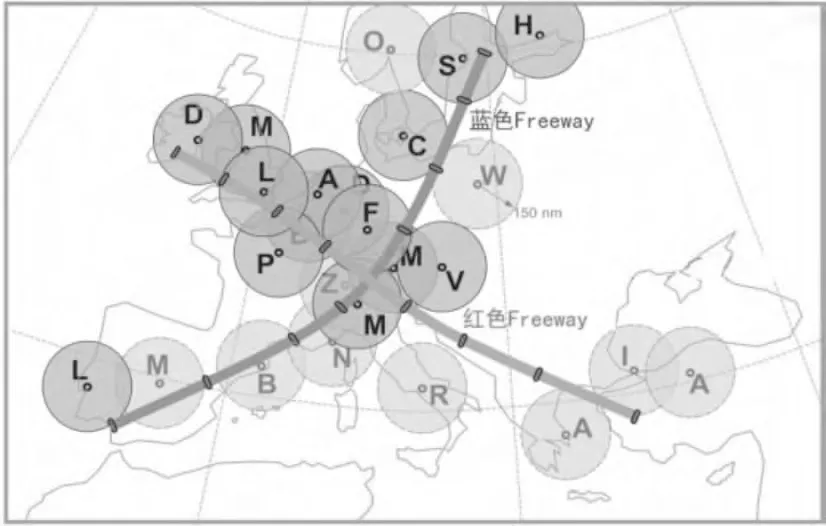
图6 欧洲高速航路示意图Fig.6 Schematic diagram of European high-speed airway

图7 欧洲高速航路高度层配置Fig.7 The flight level configuration of European high-speed airway
2)枢纽站及匝口设计。枢纽站和匝口是高速航路与传统局部航路网络的交汇处。与路网相似,其位置与结构的合理性直接影响交通流运行的安全、有序和对相连局部航路的影响。高速航路枢纽站选址最初由O’Kelly提出,并给出启发式求解算法[27-28];1992年和1998年,文献[29-31]针对该问题设计了禁忌搜索算法、随机贪婪算法以及遗传算法与禁忌搜索算法相结合的混合算法。图8是文献[32]在确定了美国“高速航路”直连的主要机场基础上分配剩余机场到最近的主要机场上,采用交通流加权质心方法确定了枢纽位置;Eurocontrol将匝口设计在巡航距离约1h的地方。航空器进入从低高度层进入,退出爬升到上一高度层,避免正常的交通流,如图9所示。2012年文献[33]采用多目标决策方法进行枢纽站选址,图10 和图11 是文献[14]所设计的京、沪、惠之间的高速航路及匝口位置。
2 目前航路网络规划技术存在的问题
通过上述分析,目前航路网络规划技术还有待于在以下几个方面进一步深入探索。

图8 美国高速航路枢纽设计Fig.8 The hub design of USA high-speed airway

图9 欧洲高速航路匝口设计Fig.9 The European high-speed airway′s ramp design

图10 中国京、沪、穗之间的高速航路Fig.10 The high-speed airway between Beijing,Shanghai and Guangzhou
1)路网络节点交通流特征的深入认识及量化建模。空中交通流量数据是航路网络规划的前提和基础,如何获取以及处理节点布局优化所需要的长期、海量、复杂的数据在以往航路网络规划中没有交代或研究,使得研究工作缺乏基本条件和依据。

图11 京、沪、穗高速航路匝口位置Fig.11 The ramp position of high-speed airway between Beijing,Shanghai and Guangzhou
2)乏对航路网络规划和航空器用户飞行路径选择的交互作用研究及建模。航路网络规划方案直接决定了航路网络结构和性能,航空器用户基于出行成本最低选择的飞行路径决定了空中交通流在航路网络中的分布模式,而管制部门又根据空中交通流的分布模式调整航路网络结点优化方案以达成其既定目标。这种相互作用、不可割裂的关系在目前航路网络规划中未曾体现,较为完整的集成优化建模尚处于探索阶段。
3)乏对地面交通规划研究成果的更多借鉴。虽然,地面路网规划与航路网络规划在交通特征上存在很大的区别,但是在系统建模的思想、方法和手段上仍有相互借鉴的可能。例如采用路网最优的用户均衡(User Equilibrium,UE)配流模型,建立基于空管和航空器用户路径最优模型,以及匝口位置的选择和设计等问题若能有效地借鉴相对成熟的地面路网规划思想或技术,将有助于航路网络规划更多新技术的突破。
3 结束语
未来各国空域结构均是局域航路网络与高速航路网络并存。局部航路网络优化技术将综合考虑管理者和用户的双重利益,全面分析实际运行约束条件,研究高效算法;高速航路网络技术刚刚起步,有较大的提升空间。全局航路网络规划技术因为不符合实际运行规则,在短期内进一步发展的可能性不大。
[1]Eurocontrol.Master plan of dynamic management of European airspace network(DMEAN)[R].USA:DMEAN Program,2004.
[2]中国民航局.我国航路网络规划计划研究报告[R].北京:中国民航局空管局,2007:23-24.CCAC.Research Report on Route Network plan[R].Beijing:Air Traffic Management of China Civil Aviation,2007.(in Chinese).
[3]国务院.国务院关于促进民航业发展的若干意见[Z].北京:国务院(2012)24号,2012.State Council.The certain Recommendations on promoting the Civil Aviation Development[Z].Beijing:State Council(2012)NO.24.(in Chinese).
[4]Mehadhebi K.A methodology for the design of a route network[C]∥Proceedings of the Third Air Traffic Management R &D Seminar ATM-2000.Irvine:University of California,2000:8-69.
[5]Siddiqee W.A mathematical model for predicting the number of potential conflict situations at intersecting air routes[J].Transportation Science,1973,7(2):158-167.
[6]Siddiqee W.Mathematical aids in air route network design[C]∥Decision and Control including the 12th Symposium on Adaptive Processes,San Diego,USA:1973IEEE Conference on.IEEE,1973,12:651-654.
[7]Siddiqee W.A mathematical model for predicting the duration of potential conflict situations at intersecting air routes[J].Transportation Science,1974,8(1):58-64.
[8]Xiao M M,Zhang J,Cai K Q,et al.Cooperative Co-evolution with Weighted Random Grouping for Large-Scale Crossing Waypoints Locating in Air Route Network[C]∥Tools with Artificial Intelligence(ICTAI),2011 23rd IEEE International Conference on.Boca Raton,Florida USA:IEEE,2011:215-222.
[9]陈才龙.基于复杂网络的航路汇聚点布局优化方法研究[D].合肥:中国科学技术大学,2011.Chen Cailong.Research on optimization method based on complex network for crossing waypoints location [D].Hefei:University of Science and Technology of China,2011.(in Chinese).
[10]周 进.基于双层规划的空域航路网络规划研究[D].南京:南京航空航天大学,2008.Zhou Jin.Research of the airspace en route net-work based on the bi-level programming[D].Nanjing:Nanjing University of Aeronautics and Astronautics,2008.(in Chinese).
[11]Wang S J,Gong Y H.Research on air route network nodes optimization with avoiding the three areas[J].Safety Science,2014(66):9-18.
[12]赵 爽.全国航路主干网络设计研究[D].北京:北京航空航天大学,2008.Zhao Shuang.Research on national trunk air route network design[D].Beijing:Beijing University of Aeronautics and Astronautics,2008.(in Chinese).
[13]Cai K Q,Zhang J,Zhou C.Optimization of the crossing waypoints in air route network[C]∥Digital Avionics Systems Conference(DASC),2010 IEEE/AIAA 29th,Salt Lake City,Utah,USA:IEEE,2010.
[14]辛正伟.航路网规划技术研究[D].南京:南京航空航天大学,2013.Xin Zhengwei.Research on air route network planning technology[D].Nanjing,Nanjing University of Aeronautics and Astronautics,2013.(in Chinese).
[15]Duong V,Gawinowski G,Nicolaon J P,et al.Sector-less air traffic management[C]∥Proceedings of the fourth USA/Europe Air Traffic Management R&D Seminar,Japan,Tokyo:USA/Europe Air Traffic Management,2001:8-13.
[16]Riviere T.Generating a european route network for sector-less[C]∥Proceedings of the 1st International Conference on Research in Air Transportation,Zilina,Slovakia:USAir Force Academy,2004.
[17]Riviere T.Redesign of the european route network for sector-less[C]∥Digital Avionics Systems Conference,2004.DASC 04.The 23rd.Salt lake city,UT:IEEE,2004.
[18]Riviere T,Brisset P.Shortest path in planar graph and air route network[C]∥4th Eurocontrol Innovative Research Workshop & Exhibition,Graz,Austria:IEEE,2005.
[19]Korn B,Tittel C E S,Pütz T,et al.Sectorless ATM-analysis and simulation results[C]∥Aviation Week & Space Technology Online,27th International Council of the Aeronautical Sciences,Nice:France,2010.
[20]Alipio J,Castro P,Kaing H,et al.Dynamic airspace super sectors(DASS)as high-density highways in the sky for a new US air traffic manage-ment system[C]∥Systems and Information Engineering Design Symposium,2003IEEE.Tehran,Iran:IEEE,2003:57-66.
[21]Yousefi A,Donohue G L,Sherry L.High-volume tube-shape sectors(HTS):A network of high capacity ribbons connecting congested city pairs[C]∥Digital Avionics Systems Conference,2004.DASC 04.The 23rd.Salt lake City,UT:IEEE,2004.
[22]Xue M,Kopardekar P H.High-capacity tube network design using the hough transform[J].Journal of guidance,control,and dynamics,2009,32(3):788-795.
[23]Kotecha P,Hwang I.Optimization Based tube network design for the next generation air transportation system(nextgen)[C]∥AIAA Guidance,Navigation,and Control Conference.Chicago,Illinois:AiAA,2009:10-13.
[24]Yousefi A,Lard J,Timmerman J.Nextgen flow corridors initial design,procedures,and display functionalities[C]∥Digital Avionics Systems Conference(DASC),2010IEEE/AIAA 29th.Salt Lake City,Utah,USA:IEEE,2010.
[25]Eriksen P,Eight-States Free route airspace project large scale real time simulation south scenario[R].Eurocontrol:EEC Report,2001(363).
[26]Eriksen P,Bonnier M.Eight-states free route airspace project large scale real time simulation south scenario[R].Eurocontrol:EEC Report,2001.
[27]O′kelly M E.A quadratic integer program for the location of interacting hub facilities[J].European Journal of Operational Research,1987,32(3):393-404.
[28]O′Kelly M E,Lao Y.Mode choice in a hub-and-spoke network:a zero-one linear programming approach[J].Geographical Analysis,1991,23(4):283-297.
[29]Klincewicz J G.Avoiding local optima in thephub location problem using tabu search and GRASP[J].Annals of Operations Research,1992,40(1):283-302.
[30]Abdinnour-Helm S,Venkataramanan M A.Solution approaches to hub location problems[J].Annals of Operations Research,1998(78):31-50.
[31]Abdinnour-Helm S.A hybrid heuristic for the uncapacitated hub location problem[J].European Journal of Operational Research,1998,106(2):489-499.
[32]Sridhar B,Grabbe S,Sheth K,et al.Initial study of tube networks for flexible airspace utilization[C]∥AIAA Guidance,Navigation,and Control Conference,Minneapolis,Minnesota:AIAA-2006-6768,Keystone,CO(August 2006),2006.
[33]王莉莉,刘 兵.空中高速路网枢纽的选择[J].中国民航大学学报,2012,30(3):6-9.Wang Lili,Liu Bing.Choice of air highway network hubs[J].Journal of Civil Aviation University of China,2012,30(3):6-9.(in Chinese).
猜你喜欢
今日农业(2021年8期)2021-11-28
军民两用技术与产品(2021年10期)2021-03-16
现代装饰(2018年4期)2018-05-22
文史春秋(2017年10期)2017-11-29
阿来研究(2016年1期)2016-12-01
哈尔滨商业大学学报(自然科学版)(2016年4期)2016-09-02
西南交通大学学报(2016年4期)2016-06-15
海峡科技与产业(2016年3期)2016-05-17
中国农业文摘-农业工程(2016年5期)2016-04-12
海军航空大学学报(2015年3期)2015-11-11
