
Capture condition for endo-atmospheric interceptors steered by ALCS and ARCS
2014-12-07 05:13:49YanfangLIUNaimingQiTianyeWANG
Control Theory and Technology 2014年1期
Yanfang LIU,Naiming Qi,Tianye WANG
1.Department of Aerospace Engineering,Harbin Institute of Technology,Harbin Heilongjiang,150001,China;
2.Department of Earth and Space Science and Engineering,York University,Toronto,Canada
Capture condition for endo-atmospheric interceptors steered by ALCS and ARCS
Yanfang LIU1,2†,Naiming Qi1,Tianye WANG1
1.Department of Aerospace Engineering,Harbin Institute of Technology,Harbin Heilongjiang,150001,China;
2.Department of Earth and Space Science and Engineering,York University,Toronto,Canada
This contribution deals with capture condition for interceptor missiles steered by aero-lift control system(ALCS)and attitude reaction-jet control system (ARCS). With the guidance law derived from bounded differential game formulation, existence condition of capture zone is studied for the case that the interceptor has advantage on maneuverability and disadvantage on agility.For the existence of the open capture zone,ARCS can only close after the engagement terminates.Moreover,ARCS also needs to contribute to maneuverability over the minimum required value.More fuel will be required if ARCS increases its contribution to maneuverability.The minimum required fuel occurs at the tangent point of two curves:the curve of critical parameters and a candidate constraint curve,which is also true even for the complex propellant constrain.The validity of these results is also demonstrated by simulations.
Capture condition;Differential game;Guidance law;Interceptor missile;Dual control
1 Introduction
Successfully intercepting the future uninhabited aerial vehicles is a tough task.A very small miss distance or even direct hit[1]is required as these targets are less vulnerable.Worse still,only marginal maneuverability the interceptor missile has over the targets.There are two approaches to improve homing performance[2]:1)utilizing advance guidance laws to improve guidance performance and 2)introducing reaction-jet control system(RCS)to increase the maneuverability and/or agility(the maximum lateral acceleration divided by the first order time constant)[3].
The major advanced missile guidance laws are developed by using optimal control theory.In developing these guidance laws,assumptions about future target maneuvers are needed[4–8].If these assumptions are wrong,very large miss distance is created[9,10].
Differential game guidance laws are less sensitive tothe estimation error of target acceleration[9]and provide an improved guaranteed(robust)homing accuracy[11].In game formulation,the interceptor(pursuer)aims to minimize the miss distance,while the target(evader)tries to maximize it.The game solution provides the optimal pursuer strategy(the interceptor’s guidance law),the optimal evasion strategy(the worst target’s maneuver),and the game value(the guaranteed miss distance).If the game value is zero,the pursuer victories and the interception terminates by capture.The set of initial conditions from where capture is guaranteed is called the capture zone.Two game formulations are mainly addressed:linear quadratic differential game(LQDG)formulation[12–15]and bounded differential game(BDG)formulation[1,10,16–19].The BDG guidance laws obtain larger capture zone[13]and a much improved homing performance [20]. Capture conditions for players(pursuer and evader)with bi-proper dynamics were also studied in[21–24].
When RCS is introduced,the combination of aero-lift control system(ALCS)and RCS requires special consideration in guidance system.Guidance laws based on BDG[24]and LQDG[15]were suggested for an interceptor having forward canards and aft tails.A feedback strategy combined BDG and LQDG was studied in[25].The forward RCS effects were investigated in[26]using BDG approach.A logic based guidance law was developed for interceptors steered by aerodynamic-fins and divert-thrusters in[27].In[28],capture conditions were studied for the interceptor steered by ALCS and divert thrusters control system(DTCS).
In this paper, the study in [28] is extended to the interceptor steered by ALCS and attitude RCS(ARCS).Divert thrusters locate near the center of gravity(CG)and generate lateral acceleration directly.However,attitude thrusters locate ahead of the interceptor and generate lateral acceleration by changing the interceptor’s attitude.Compared with DTCS,ARCS requires less propellant,however,it contributes little to the interceptor’s maneuverability.The main contributions of this paper are as follows:1)capture conditions are derived by using BDG formulation;2)the approach for obtaining the minimum ARCS thrust and propellant is given;and 3)propellant quantity is suggested for the worst case–the target has ideal dynamics.
The reminder of this paper is organized as follows.Section 2 outlines the engagement between the dual controlled interceptor and the target.Section3describes the game solution and game space structure.The existence condition of the capture zone is derived in Section4.The propellant limit effects are studied in Section5.The validity of the analytical results is demonstrated by simulation in Section 6.This paper is concluded in Section 7.
2 Problem statement
The engagement between an interceptor missile(pursuer)and its target(evader)is considered.The pursuer is dual-controlled by ALCS and ARCS.A schematic view of the planar end-game geometry is shown in Fig.1.TheX-axis is aligned with the initial line-of-sight(LOS).V,a,and φ are velocity,lateral acceleration,and flightpath angle,respectively;λ andrare LOS angle and range between both players,respectively;y=yE−yPis the relative separation normal to the initial LOS;and subscripts P and E denote the pursuer and the evader,respectively.
Fig.1 Planar end-game geometry.
The interception time can be computed for any given initial condition:

The relative motion normal to the initial LOS is expressed by[1,18,19,24,28,29]

where u and amaxare commanded and maximum lateral acceleration,respectively;τ is the time constant;and additive subscripts A and R denote ALCS and ARCS,respectively.
The attitude-thrusters locate in front of the interceptor and work from tRSto tREwith operation time

The ARCS realizes the acceleration commands by changing interceptor’s attitude.It increases the interceptor’s response speed,but contributes little to the maximum lateral acceleration.Thus,the pursuer’s total lateral acceleration

is bounded by

Thus,control commands of the pursuer is assumed to satisfy

with ARCS contribution ratio on maneuverability defined as

Remark 1Letting β(t)≡ 0 results in ALCS-only controlled pursuer and letting β(t)≡ 1 results in ARCS-only controlled pursuer.
The evader’s acceleration command is also bounded

Non-dimensional parameters, pursuer/evader maneuverability ratio μ,evader/pursuer dynamics ratio ε,and ARCS/ALCS dynamics ratio α,are respectively defined as

As ARCS has a smaller time constant than the ALCS,thus

The time-to-go and its normalized form are

Moreover,denotations θ0=tf/τP,A,θf=0,θRS=(tf−tRS)/τP,A,and θRE=(tf− tRE)/τP,Aare made.Thus,equation(2)is reduced and normalized to

where single prime denotes the first derivative,z(θ)is normalized zero-effort-miss(ZEM)
and F(tf,t)is the transition matrix of the original homogeneous system in equation(2).
The natural cost function is the miss distance

The situation that the pursuer achieves zero miss distance,i.e.,J=0,is called capture.The domain of initial positions(θ0,z(θ0))from which a guidance law guarantees capture is called the capture zone of this guidance law.The open capture zone is a capture zone that extends to all θ>0.
3 Game space structure
In this section,the game solution for ALCS-only controlledpursuer is briefly reviewed and the possible game space structure for dual-controlled pursuer is presented.In the sequel,the games for ALCS-only controlled pursuer and for the dual-controlled pursuer are referred to as aero-controlled game(ACG)and dual-controlled game(DCG),respectively.
3.1 ACG solution
If condition μ > 1 and μ ε < 1 holds,no capture zone exists in game space D:={(θ,z):θ > 0,z ∈ R}[1,10,18].As shown in Fig.2,the game space decom-poses into two regions by the border optimal trajec-regiongame value(guaranteed miss distance)is constant

Fig.2 Typical game space decomposition.
3.2 Possible game space structure for DCG
By virtue of the fact that ψ(θ)> 0 for θ > 0,the optimal strategies of DCG are solved to be[1,10,18,25,28]
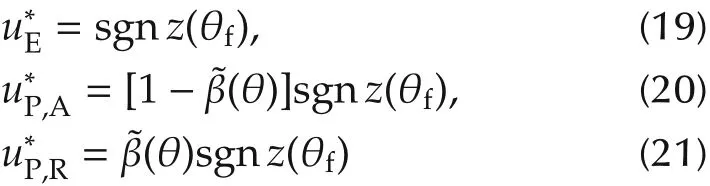
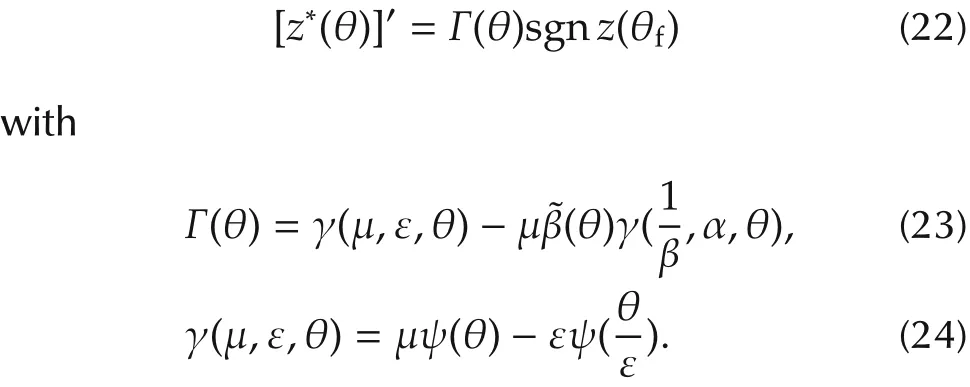
The game space is obtained by integrating Γ(θ)backward from different end conditions z(θf).Such a candidate trajectory,starting at(θ,z)=(0,z(θf)),is
Typical game space is shown in Fig.2 with0.4s,1.The game space decomposes into two parts by border optimal trajectories zDand−zD(solid lines),if the family of candidate optimal trajectories does not fill it.The region filled with optiamal trajectories is the regular region,in which the optimal feedback strategies are

by virtue of the fact that along an optimal trajectory,z(θ)has the same sign[28].
The remainder of the game space is the singular regionIn the singular region,the game value is constant.If it is zero,this region becomes the capture zone.
It is not surprised to find that the dual control system enlarges the singular region and reduces the guaranteed miss distance as ARCS increases the pursuer’s response speed.However,Fig.2 also shows that,even when ARCS is utilized,the capture zone does not always exist.The existence condition of the capture zone is studied in following sections.
4 Capture condition
In this section,the existence condition of the capture zone for DCG is derived under the conditions

Thus,we suppose the pursuer has advantages on maneuverability and agility when it is ARCS-only controlled.However,it has agility disadvantage when it is ALCS-only controlled.
For the case that ARCS works all over the engagement,a new function is defined as

which is used to derive the existence condition of the capture zone.
4.1Properties of¯Γ(θ)
In proving properties of¯Γ(θ),two new functions are defined as the facts:1)


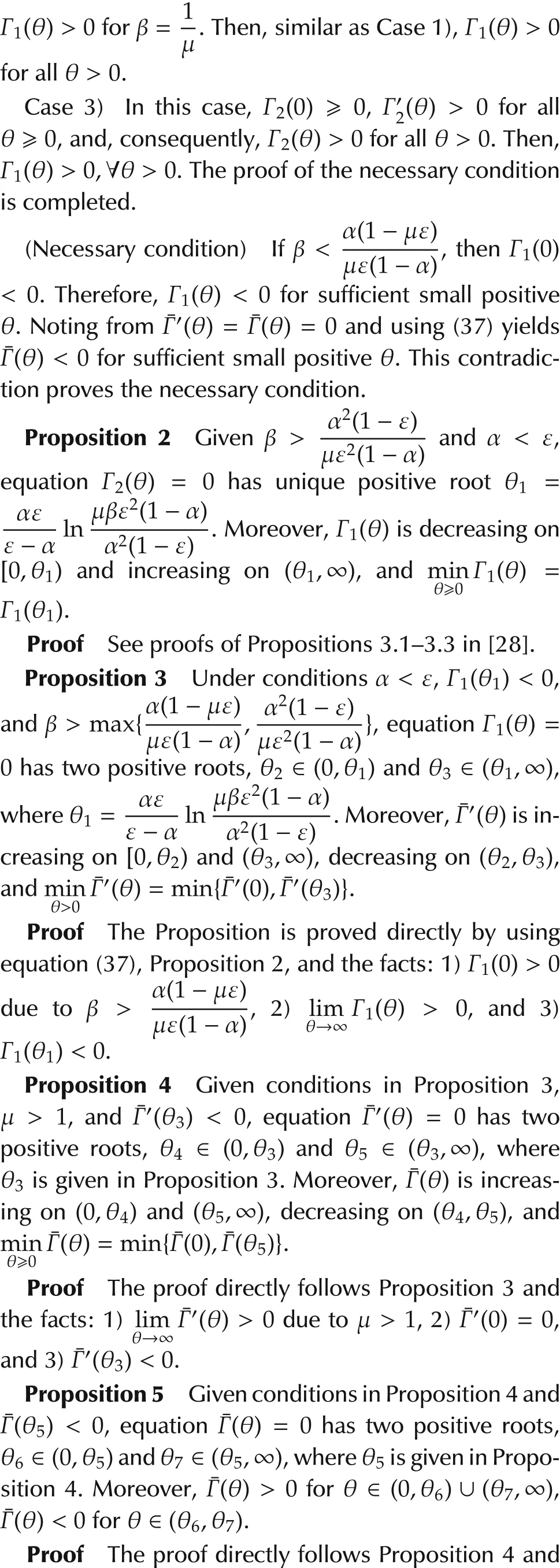
4.2 Existence condition for capture zone
In this subsection,the conditions of μ,ε,α,β,θRE,and θRSenabling capture will be obtained analytically.
Lemma 1The necessary and sufficient condition for the existence of a capture zone in the game space is that there existsv> 0 such that Γ(θ)> 0 for θ ∈ (0,v).
ProofSee proof of Theorem 4.1 in[23].
Theorem 1Given μ ε < 1 and θRE> θf,a capture zone cannot exist in the game space.
ProofUsing l’Hpital rule yieldsμ ε.Since θRE> θfand μ ε < 1,then Γ(θ) < 0 for sufficiently small θ ∈ (θf,θRE).By using Lemma 1,the theorem is proved.
Remark 2Theorem 1 indicates that,if ARCS closes before the interception terminates,the pursuer will not able to secure capture as it has agility disadvantage when it is ALCS-only controlled.
Theorem 2Given θRE≤ θf,for the existence of a capture zone in the game space,a sufficient condition is β and the necessary condition is
ProofIf condition θRE≤ θfholds,one obtains Γ(θ)=Γ¯(θ)for θ ∈[θf,θRS).Meanwhile,we have

Remark 3This theorem has following physical interceptions.Capture is guaranteed for some initial conditions if ARCS has a sufficient large contribution on maneuverability.However,the pursuer will not be able to secure capture for any initial condition if this contribution is smaller than the required value.
Theorem 3Given(30),necessary and sufficient condition for a capture zone,if it exists,to be open is that one of following conditions

Remark 4Theorem 3 gives the necessary and sufficient condition for a capture zone to be open by assuming that ARCS works all over the engagement.However,in reality,it only works for a designed duration,considering which the existence condition is given in the next theorem.
Theorem 4Given(30),the necessary and sufficient conditions for the existence of the open capture zone in the game space are
1)θRE≤ θf,
3)one of conditions(38)–(39)holds if θRS< θ1;one of conditions(38)–(40)holds if θRS∈ [θ1,θ3);one of conditions(38)–(41)holds if θRS∈ [θ3,θ5);one of conditions(38)–(42)holds if θRS∈ [θ5,θ7);and one of conditions(38)–(43)holds if θRS∈ [θ7,∞).The parameters θ1,θ3,θ5and θ7are given in Propositions 2–5.
Proof(Sufficient condition) Since θRE≤ θf,thenThus,z∗(θ)>0 for θ ∈ (θf,θRS],which is proved similarly to the sufficient condition of Theorem 3 by using conditions 3)and(30).For the caseusing(26)yieldFor the caseμ βϕ(1,α,θRS)+ μ βϕ(1,α,θRE).Using(15),(17),and condition 2)and noting from ϕ(1,α,θRE)> ϕ(1,α,θRS)and,consequently,the region between z∗(θ)and −z∗(θ)guarantees capture and is open.The sufficient condition is proved.
(Necessary condition) If condition 1)does not hold,using Theorem 1 yields that there does not exist a capture zone.If condition 2)does not hold,we have a)z∗(θ)will intersect θ-axis atand the capture zone enclosed by z∗(θ)and −z∗(θ)can only be closed for the case ∃v > 0:Ψ(θ)|0<θ<v> 0,or b)there does not exist a capture zone otherwise.If condition 3)does not hold,using Theorem 3 yields the open capture zone does not exist.Hence,all of conditions 1)–3)are necessary for the existence of the open capture zone.
Remark 5In Theorem 4,condition 1)gives the ending time of ARCS,and conditions 2)and 3)indicate that different initial time of ARCS will cause different parameter requirement for existence of the open capture zone.
4.3 Parameter effects
In Fig.3,the parameter requirement for existence of the open capture zone is given based on Theorem 4.
The capture-guaranteed parameter space(β,θRS)is shown in top left subfigure with gray color with θRE=0.Thus,the working duration of ARCS is fixed if θRSis given.In the figure,the curve shows the critical β value guaranteeing existence of the open capture zone for a given θRS.For example,β1is the minimum requirement of β if ARCS starts at θRS,1.It means that ARCS should contributes sufficient large lateral acceleration if its initial time is fixed.On the other hand,if the thrust of ARCS is fixed,β = β1for example,then the initial time of ARCS should be not later than θRS,1.Two meaning fulvalues,β0and Δθ0are also shown in the figure.The former is the minimum required β.If ARCS can not generates larger enough thrust to make β ≥ β0,the engagement can not be guaranteed to be terminated by capture.The latter one is the normalized form of minimum required ARCS working duration.The evader can survive if ARCS work duration is shorter than this value,even the pursuer is ARCS-only controlled when ARCS is on.
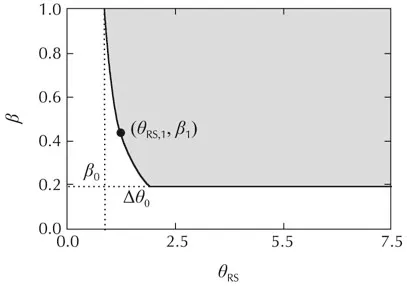
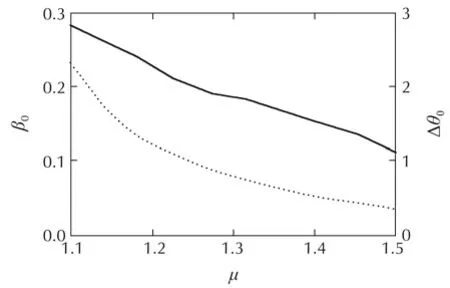
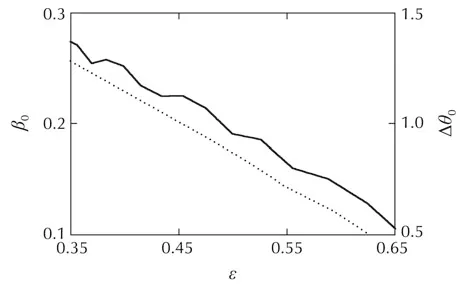
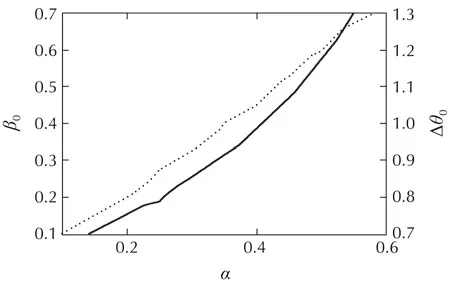
Fig.3 The required β value for existence of the open capture zone.
Actually,the values β0and Δθ0are determined by μ,ε and α,as shown in other three subfingures.Both β0and Δθ0decrease with μ, ε.Thus,if the agility of the pursuer increases by increasing the maximum lateral acceleration or decreasing the time constant,the requirement of the minimum thrust and/or working duration of ARCS will decrease.However,both β0and Δθ0increase with α,which indicates that if ARCS’s response speed decreases,the working duration and/or the thrust of ARCS should increase to guarantee capture.
5 Effects of propellant limits
In reality,the propellant of ARCS is actually restricted by the pursuer’s configuration,such as weight and size.The propellant limit is approximated by

To simplify the analysis,equation(45)is further reduced as

The physical interception of equation(46)is that,if ARCS increases its contribution on the pursuer’s maneuverability,its working duration reduces.In this section,the propellant limit effects are investigated under equation(46).
5.1 Thrust of ARCS
Fig.4 shows ARCS thrust’s effect on the game space structure withQ=0.25s,and θRE=0.The open capture zone exists for cases β =0.25 and β =0.5.If β is too large,i.e.,β=0.75,the open capture zone does not exist as ARCS works too shortly.If β is too small,i.e.,β=0.1,there is no open capture zone in the game space due to β < β0.The critical β curve and constraint curves for differentQare shown in Fig.5.
The region between the critical β curve and a constraint curve is the parameter space for existence of the open capture zone under propellant limit.The markers in the figure denote the calculating point of the above and following examples.The cases β =0.1 and β =0.75,shown in Fig.4,actually are not included in this parameter space.The formula in equation(46)is a simplified propellant constrain.However,for a complex form of propellant constrain,the parameter space for existence of the open capture zone can also be obtained similarly as in Fig.5.
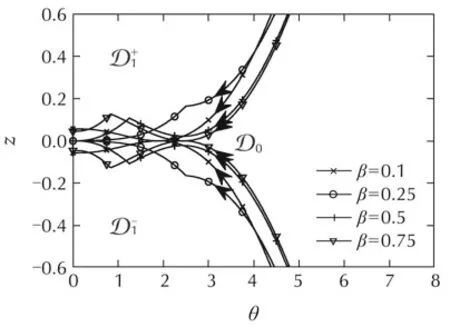
Fig.4 Effects of β under propellant limit.

Fig.5 Critical β as a function of θRSunder propellant limit.
The effect of the propellant quantity on the game space is shown in Fig.6 for fixed contribution of ARCS on the pursuer’s maneuverability,i.e., β =0.25,and θRE=0.The calculating points are also shown in Fig 5.If the fuel is smaller enough,there will be no intersect point between the critical β curve and the constraint curve.Consequently,the closed capture zone cannot exist.Increasing the propellant will enlarge the capture zone and,consequently release the handover condition between the terminal phase and the midcourse guidance.Seen from Fig.5,the critical case for the given β,i.e.,Q=0.1672s,is one intersect point of the critical β curve and constraint curves.
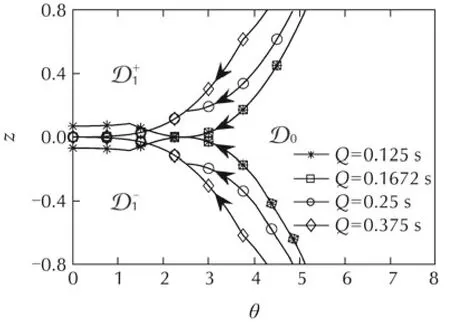
Fig.6 Effects of propellant quantity.
5.2 Minimum propellant requirement
The minimum ARCS propellant satisfies

which can also be expressed as

The right-hand term of(48)is the guaranteed miss distance when the pursuer is ALCS-only controlled.The left-hand term represents ZEM reduced by ARCS.Base on Theorem 1,capture guaranteed interception requires θRE≤ θf.Thus,the minimum required propellant is an optimal problem stated as

Theorem 5Under conditions(10)and(30),the minimum required propellant is


where θRS,0satisfiesProofζ > 0 and(10)hold,thenf(ζ)> 0,g(ζ)> 0,andf(ζ)andg(ζ)are increasing.Givenμ andε,is constant.Letting β < β,then
121 and,consequently,θRS,1> θRS,2.Therefore,1.Thus,the required propellant increases with β.Moreover,the minimum propellant requirement occurs at β0and isQ∗= β0τP,AθRS,0,where θRS,0satisfies equation(52).
Remark 6In Theorem 5,the optimal propellant is given under the simplified constrain equation(46).As shown is Fig.5,a set of constraint curves is obtained by changing the propellant limit.Among these curves,there is one that intersects the critical β curve tangently.The tangent point,(θRS,β)=(1.9375,0.1905)marked by star in Fig. 5, gives the optimal propellant. The thick solid line is the tangent constraint curve. For the complex constrain,Theorem 5 may not hold.However,the optimal propellant can also be obtained by finding the tangent point of the critical β curve and the tangent constraint curve.
Using equations(15)and(24)yieldsther using equations(14)and(17)and noting from that γ(μ,ε,θ) < 0 fordecreases with ε.Thus,

which represents the worst case for the pursuer as the target has ideal dynamics.
6 Simulation study
This section demonstrates the validity of analytical results by simulations.Two sets of simulations are carried out.
The first set of simulations is carried out under ideal conditions:1)both players have perfect information structure and utilize the optimal guidance strategies in equation(27);2)both the guidance cycle and the simulation step are set to be as small as 0.1ms;and 3)both players point to each other and have zero initial lateral acceleration.The simulation results are shown in Table1.The game space structure for cases 1–4 are shown in Fig.4 and that for cases 5–7 are shown in Fig.6.Seen from Fig.5,parameter sets,(θRS,β),for cases 2,3,6,and 7 are above the critical β curve.For these cases,zero miss interception is guaranteed under the ideal conditions,which demonstrated Theorem 4. Case 8 is actually the minimum propellent case.The miss distance for this case is smaller enough for the hit-to-kill performance,which demonstrates Theorem 5.
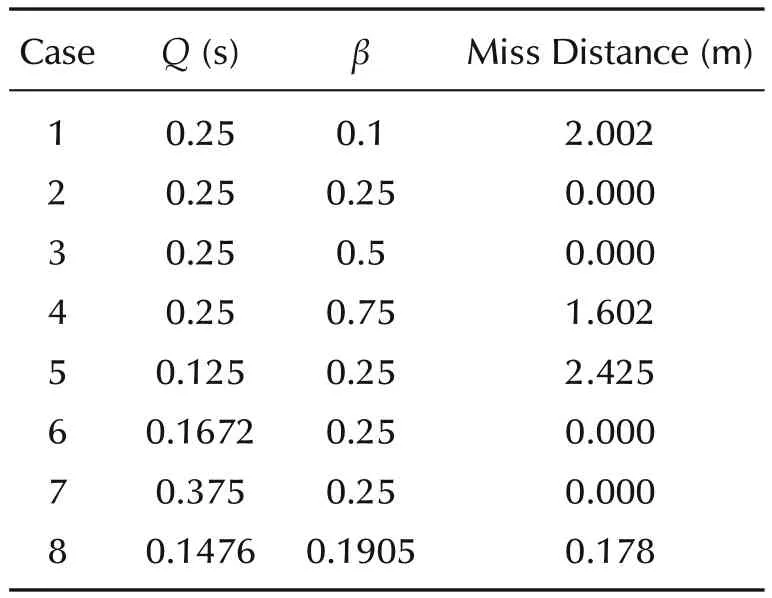
Table 1 Miss distance under ideal conditions.
In the second set of simulations,the target’s maneuvering sequence is selected to be bang-bang type(maximum maneuver command to one direction followed by a maximum maneuver command in the opposite direction)[1,10,11,16–18,24].The maneuver command switches randomly at(tgo)sw∈[0,3]s.The estimated target time constantThe guidance cycle and the simulation step are taken to be 5ms and 1ms,respectively.At the beginning of the end-game,both players are assumed to point directly toward each other(the nominal case of head-on engagement).The initial lateral accelerations of both players are chosen to be zero.The results of 500 Monte Carlo runs are shown in Fig.7.Case 1 is for parametersQ=1.008s and β=0.6,which satisfies equation(56);Case 2 is for the minimum propellant case given in equation(51);and Case 3 is for ALCS-only controlled interceptor.Results show that the optimal propellant case has a better performance than the ALCS-only controlled case.However,it may result in a large miss distance due to estimation error of target’s time constant and sampling error.Assume that the estimation of time-to-goestimation of target accelerationˆaE~N(aE,δaE).The effects of time-to-go estimation error,target acceleration estimation error and delay are analyzed separately.The results in Figs.7–9 show that the performance becomes worse.To improve the performance,more propellant is required.However,the suggested propellant quantity,Case 1,guarantees robust performance.

Fig.7 Cumulative miss distance distribution with tgoestimation error.
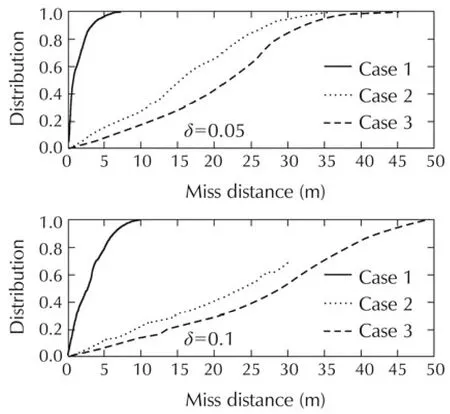
Fig.8 Cumulative miss distance distribution withaEestimation error.

Fig.9 Cumulative miss distance distribution withaEestimation delay.
7 Conclusions
The capture condition is studied for interceptor missiles steered by aero-lift control system and attitude reaction-jet control system. Analytical results are derived under the condition that the interceptor has advantage on maneuverability and disadvantage on agility if it is aero-lift-only controlled.
For the existence of the open capture zone,the attitude reaction-jet control system should close after the engagement terminates and contribute to the maneuverability over the minimum required value.The analytical results also show that the minimum propellant requirement increases with the contribution of attitude reaction-jet control system on the maneuverability,for a simplified form of propellant constrain.However,for the complex propellant limit, this minimum requirement can be obtained by finding the tangent point of the curve of critical parameters and a candidate constraint curve.A suggested parameter allocation is given by assuming target has ideal dynamics,which shows a robust performance in the simulation.
[1]J.Shinar,T.Shima.Nonorthodox guidance law development approach for intercepting maneuvering targets.Journal of Guidance,Control,and Dynamics,2002,25(4):658–666.
[2]Y.Liu,N.Qi,Z.Tang.Linear quadratic differential game strategies with two-pursuit versus single-evader.Chinese Journal of Aeronautics,2012,25(6):896–905.
[3]R.Hirokawa,K.Sato,S.Manabe.Autopilot design for a missile with reaction-jet using coefficient diagram method.AIAA Guidance,Navigation,and Control Conference.Montreal:AIAA,2001:739–746.
[4]Z.Paul.Tactical and strategic missile guidance.Progress in Astronautics and Aeronautics.Reston:AIAA,1997:143–161.
[5]N.F.Palumbo,R.A.Blauwkamp,J.M.Lloyd.Modern homing missile guidance theory and techniques.Johns Hopkins APL Technical Digest,2010,29(1):42–59.
[6]V.Garber.Optimum intercept laws for accelerating targets.AIAA Journal,1968,6(11):2196–2198.
[7]R.G.Cottrell.Optimal intercept guidance for short-range tactical missiles.AIAA Journal,1971,9(7):1414–1415.
[8]F.W.Nesline,P.Zarchant.A new look at classical vs modern homing missile guidance.Journal of Guidance,Control,and Dynamics,1981,4(1):78–85.
[9]G.M.Anderson.Comparison of optimal control and differential game intercept missile guidance laws.Journal of Guidance,Control,and Dynamics,1981,4(2):109–115.
[10]T.Shima,J.Shinar.Time-varying linear pursuit-evasion game models with bounded controls.Journal of Guidance,Control,and Dynamics,2002,25(3):425–432.
[11]J.Shinar,T.Shima,A.Kebke.On the validity of linearized analysis in the interception of reentry vehicles.AIAA Guidance, Navigation,and Control Conference and Exhibit.Reston:AIAA,1998:1050–1060.
[12]Y.C.Ho,A.E.Bryson JR.,S.Baron.Differential game and optimal pursuit-evasion strategies.IEEE Transaction on Automatic Control,1965,10(10):385–389.
[13]V.Turetsky,J.Shinar.Missile guidance laws based on pursuitvasion game formulations.Automatica,2003,39(4):607–618.
[14]O.Belapolsky,J.Z.Ben-asher.On two formulations of linear quadratic optimal guidance.AIAA Guidance,Navigation,and Control Conference and Exhibit.Hilton Head:AIAA,2007:1–26.
[15]T.Shima,O.M.Golan.Linear quadratic differential games guidance law for dual controlled missiles.IEEE Transaction on Aerospace and Electronic Systems,2007,43(3):834–842.
[16]S.Gutman,G.Leitmann.Optimal strategies in the neighborhood of a collison course.AIAA Journal,1976,14(9):1210–1212.
[17]S.Gutman.On optimal guidance for homing missiles.Journal of Guidance,Control,and Dynamics,1979,2(4):296–300.
[18]J.Shinar.Solution techniques for realistic pursuit-evasion games.Advances in Control and Dynamic Systems.New York:Academic Press,1981:63–124.
[19]N.Qi,Y.Liu,X.Sun.Differential game guidance law for interceptor missiles with a time-varying lateral acceleration limit.Transactions of the Japan Society for Aeronautical and Space Sciences,2011,54(185/186):189–197.
[20]T.Shima,O.M.Golan.End-game guidance laws for dual-control missiles.Proceedings IMechE–Part G:Journal of Aerospace Engineering,2005,219(2):157–170.
[21]S.Gutman.Superiority of canards in homing missiles.IEEE Transaction on Aerospace and Electronic Systems,2003,39(3):740–746.
[22]T.Shima.Capture zomes in a pursuuit-evasion game.Proceedings of IEEE Conference on Decision and Control.Hawaii:IEEE,2003:5450–5455.
[23]T.Shima.Capture conditions in a pursuit-evasion game between players with biproper dynamics.Journal of Optimization Theory and Applications,2005,126(3):503–528.
[24]T.Shima,S.Member,O.M.Golan.Bounded differential games guidance law for dual-controlled missiles.IEEE Transactions on Control System Technolody,2006,14(4):719–724.
[25]Y.Liu,N.Qi,R.Lu,et al.Bounded linear-quadratic differential game guidance law fordual-thruster controlled missiles.Transactions of the Japan Society for Aeronautical and Space Sciences,2012,55(1):68–76.
[26]Y.Li,N.Qi,W.Zhang,et al.Bounded differential game guidance law for interceptor missiles with aero fins and reaction jets.Transactions of the Japan Society for Aeronautical and Space Sciences,2011,53(182):275–282.
[27]Y.Li,N.Qi.Logic-based guidance law for interceptor missiles steered by aerodynamic lift and divert thruster.IEEE Transactions on Control System Technolody,2011,19(4):884–890.
[28]Y.Liu,N.Qi,Z.Tang.Effects of divert-thrusters on homing performance of endo-atmospheric interceptors.Journal of Optimization Theory and Applications,2013,156(2):345–364.
[29]J.Shinar,V.Y.Glizer,V.Turetsky.Robust pursuit of a hybrid evader–the generalized solution.IEEE 26th Convention of Electrical and Electronics Engineers in Israel.Eilat:IEEE,2010:717–721.
26 February 2013;revised 5 July 2013;accepted 3 September 2013
DOI10.1007/s11768-014-0031-3
†Corresponding author.
E-mail:liu-yanfang@hotmail.com.Tel.:+1 416-736-2100 ext.40484;fax:+1 416-736-5817.
This work was partially supported by the China Aerospace Science and Institute Corporation and State Scholarship Fund.

Yanfang LIUis a Ph.D.candidate at School of Astronautics,Harbin Institute of Technology,and a visiting scholar student at Department of Earth and Space Science and Engineering,York University.His study in Canada is supported by State Scholarship Fund.He received his B.E.degree from the Harbin Engineering University in 2008.His area of research includes missile guidance and control.E-mail:liu-yanfang@hotmail.com.

Naiming QIis a professor with School of Astronautics,Harbin Institute of Technology.He received his Ph.D.degree from Harbin Institute of Technology in 2001.His area of research includes aircraft dynamics,guidance,and control and integration of electro-mechanical system.E-mail:qinmok@163.com.

Tianye WANGis a graduate student with School of Astronautics,Harbin Institute of Technology.He received his B.E.degree from Harbin Institute of Technology in 2012.E-mail:wang878552527@126.com.
Journal title change
We would like to inform you that the title of‘Journal of Control Theory and Applications’is changed to ‘Control Theory and Technology’.The change will be effective from the beginning of 2014.
We welcome your submissions for the journal with new title(http://controls.papercept.net).
 Control Theory and Technology2014年1期
Control Theory and Technology2014年1期
- Control Theory and Technology的其它文章
- Constrained optimal steady-state control for isolated traffic intersections
- Design of high-speed and low-power finite-word-length PID controllers
- Distributed attitude synchronization using backstepping and sliding mode control
- Non-Zenoness of piecewise affine dynamical systems and affine complementarity systems with inputs
- Frequency-domain L2-stability conditions for time-varying linear and nonlinear MIMO systems
- Control of a flexible rotor active magnetic bearing test rig:a characteristic model based all-coefficient adaptive control approach