车内噪声听觉时域掩蔽主动控制LMS算法
2014-12-05 11:54冯天培王岩松
噪声与振动控制 2014年3期
冯天培,王岩松,郭 辉
(上海工程技术大学 汽车工程学院,上海 201620)
汽车普及给乘客带来交通便捷的同时,汽车运行时产生的车内噪声也在影响乘客乘坐舒适性,增加乘客疲劳感和烦躁度。近几十年来,已有许多专家和学者致力于车内噪声的降低和消除的研究[1,2]。
车内噪声主动控制(ANC,也即车内有源消声),主要是利用一套信号采集处理电路和消声算法来控制扬声器发出与车内乘员耳朵处的车内初级噪声幅值相同相位相反的声波,以达到与初级噪声相抵消从而降低车内乘员耳朵处的噪声水平的目的。近二、三十年来已有许多学者和研究人员致力于车内噪声主动控制的研究,取得许多成果[3—5]。在车内噪声主动控制中,控制算法的研究是关键,关系到系统稳定性、消声效果和实时性。LMS(Least Mean Square)算法即最小均方算法是最早被用于车内噪声主动控制的线性自适应算法,LMS算法简单有效,实时性好,能对环境进行自适应和跟踪,其控制目标是自适应保持若干误差传声器处声音量值的均方最小,以在传声器附近获得降噪区。而人耳听觉感知系统对声音的感觉具有主观性,即声压大小与人耳对声音强弱的感觉并不完全一致,甚至存在声压降低但人感觉声音更响的情况[6],车内声品质评价指数也会降低[7],车内乘员舒适性得不到进一步改善,于是一些研究人员将车内ANC的研究重点转向改善车内声品质,提高车内乘客听觉舒适性。Sommerfeldt等[8]以响度最小化为控制目标,对一系列噪声样本进行ANC仿真控制,控制效果很大程度上依赖噪声本身特性。姜顺明等[9]以车内噪声响度为控制目标对车内ANC滤波-x LMS算法进行改进,开发了Loudness-LMS算法,根据等响曲线设计响度滤波器。
时域掩蔽效应是人耳听觉掩蔽效应的一种,指两个不同时发生的声音一个声音因另一个较强声音的存在而使人耳对其的感知能力下降的现象。时域掩蔽在人们的日常生活中扮演了一个重要角色,对人耳听觉感知产生重要影响,分为前掩蔽效应和后掩蔽效应[10]。本文在LMS算法基础上加入人耳听觉后掩蔽效应,对LMS算法进行改进,噪声控制目标从单一的降噪转向降低噪声响度,改善车内噪声的声品质,进一步提高车内乘客听觉舒适性。
1 LLMMSS算法
1.1 原理及控制框图
LMS算法1960年由Widrow与Hoff提出,是随机梯度算法族的一员,该算法在随机输入维纳滤波器递归计算中使用确定性梯度,使用简单有效,广泛应用于车内ANC、自适应波束成形与自适应谱线增强等领域。LMS算法是一种线性自适应滤波算法,由两个基本过程构成[11]:
(1)滤波过程,包括(a)计算横向滤波器输出对输入信号的响应;(b)通过比较输出结果与期望响应计算估计误差信号;
(2)自适应权值调整过程,根据估计误差信号与输入信号自适应调整滤波器权值。
这两个过程一起工作构成一个反馈环,控制框图如图1所示。
基于最速下降算法,有LMS算法的三个基本迭代过程(实数形式):
1)滤波输出:
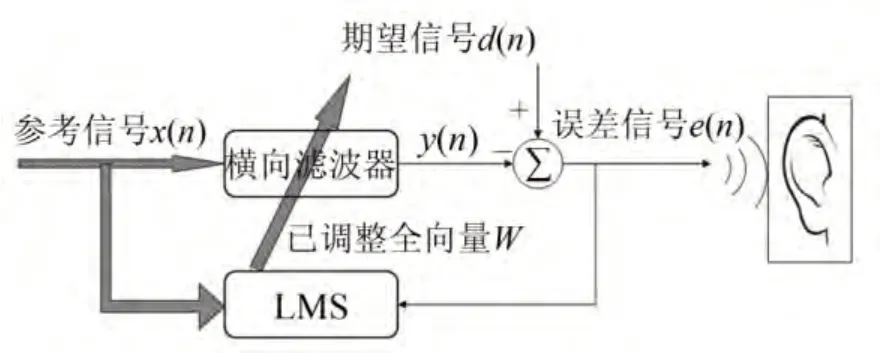
图1 LMS算法车内噪声主动控制框图

2)误差信号

3)滤波权值的自适应调整

其中输入参考信号X(n)是m+1维矢量,横向滤波器为m阶,权W(n)为m+1维矢量,y(n)是滤波器输出信号,μ为该算法步长,一般取为小步长,以保证算法收敛。
1.2 LLMMSS算法用于车内AANNCC
本文中车内噪声数据的采集,实验车辆为国产大众Golf 1.4 T,噪声采集设备为B & K公司的PULSE噪声采集设备,重采样频率44 100 Hz,样本信号为匀速30 km/h前排司机位右耳处噪声信号,记为R2。此信号即作为图1中LMS算法的期望信号。将参考信号仍取为该信号,在Matlab中完成LMS算法对匀速30 km/h前排司机位右耳处噪声的抵消仿真。运算结果如图2(b)所示。由图2可以看出,LMS算法运用于车内ANC得到的误差信号的声压值明显小于样本信号的声压值,在司机右耳处获得一个明显的降噪区。
响度是反映人耳对声音强弱感觉的心理声学参量,是反映声品质的重要的客观参数,其大小与人耳对声音的强弱感觉成正比,单位是sone。表1显示了LMS算法在降低噪声量值的同时,响度由主动控制前的10.3 sone降至3.4 sone,改善了噪声声品质和乘客舒适性,证明了LMS算法的有效性和可行性,与文献[12]结论一致。
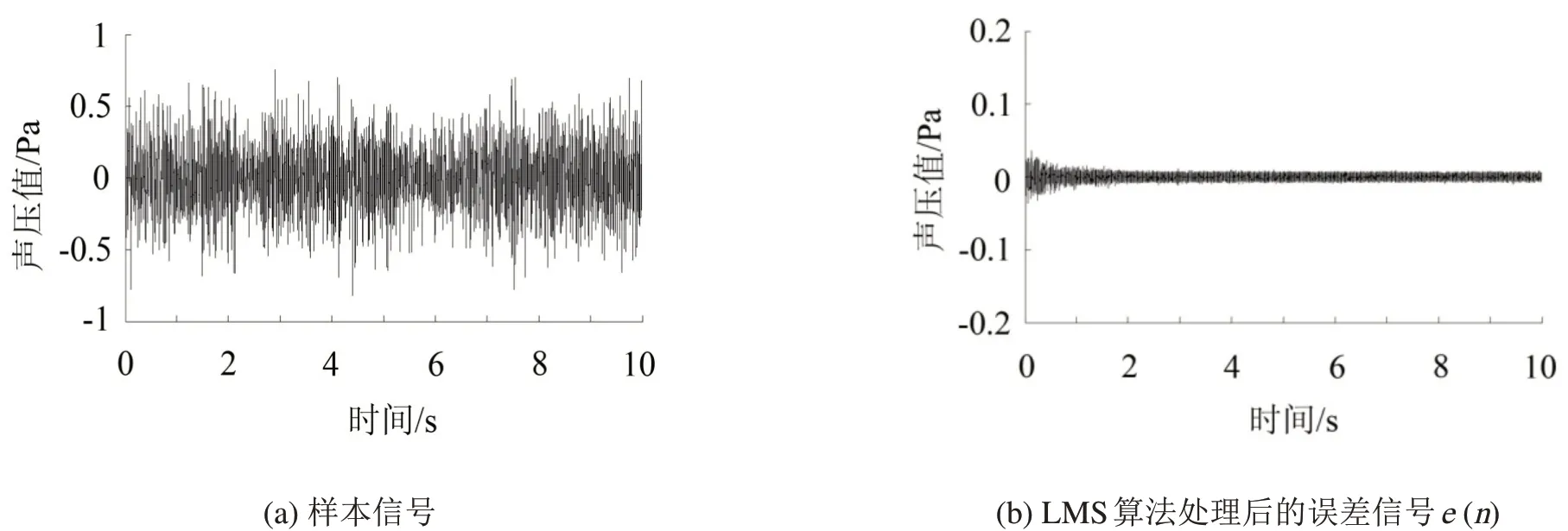
图2 原始样本信号与LMS处理后的误差信号
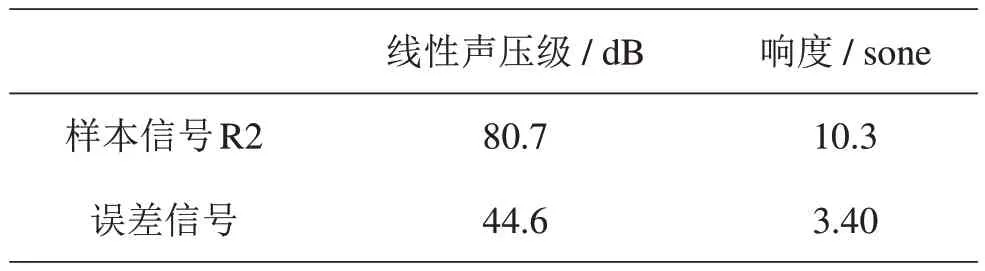
表1 样本信号R2与LMS处理后的误差信号对比
2 基于后掩蔽的LLMMSS算法研究
2.1 后掩蔽效应
如果人耳对一个声音的感知能力由于另一个较早发生的较强声音的存在而降低,则发生了后掩蔽效应,这个较强声音对人耳听觉系统影响较大。在掩蔽效应的应用中,数字水印是一个重要方向。文献[13]提出了根据数字音频信号特性和人耳听觉时域掩蔽效应相结合嵌入数字水印的方法,时域掩蔽效应取原音频信号的指数衰减包络线,如图3所示。
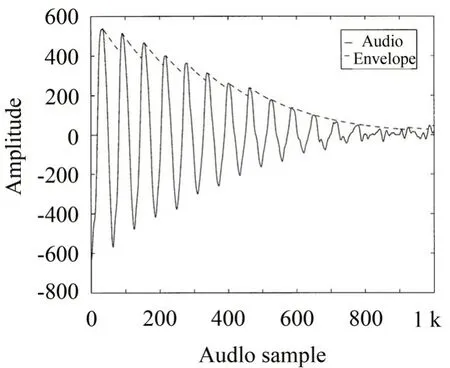
图3 音频信号及其估计包络线
2.2 Post-maskingg LLMMSS算法
本文提出的基于人耳听觉后掩蔽效应的车内噪声主动控制LMS算法,即Post-masking LMS算法,是在LMS算法基础上,根据后掩蔽效应将n时刻的误差信号e(n)与n-1时刻的误差信号e(n-1)中对人耳听觉感受影响较大的信号反馈至LMS算法。根据后掩蔽效应,若误差信号e(n-1)掩蔽了e(n),则认为后掩蔽发生,误差信号e(n-1)对人耳听觉影响大,将其反馈至LMS算法中参与滤波器权矢量的调整;若e(n-1)没有掩蔽e(n),则认为后掩蔽没有发生,误差信号e(n)对人耳听觉影响大,将其反馈至LMS算法中,这与传统LMS算法一致。Postmasking LMS算法的控制目标是削弱对人耳听觉主观性影响较大的信号对人耳听觉系统的影响,以此来改善人耳听觉主观性与乘客听觉舒适性,相比之下,传统LMS算法仅仅将n时刻的误差信号e(n)反馈至LMS中自适应调整横向滤波器权值,仅仅实时保持误差信号e(n)的均方最小,而此时刻的信号e(n)并不一定对人耳听觉影响大。
由于采样频率为44 100 Hz,采样间隔0.022 6 ms,根据图3可近似认为对于n-1时刻的误差信号e(n-1)与n时刻的误差信号e(n))来说,信号e(n-1)的后掩蔽曲线是一条与x轴平行的直线包络线,即若振幅|e(n-1)|不小于|e(n)|,则e(n)被e(n-1)掩蔽,人耳会感知到e(n-1),故将信号e(n-1)反馈至LMS算法;若振幅|e(n-1)|小于|e(n)|,则e(n)不被e(n-1)掩蔽,仍将原误差信号e(n)反馈至LMS算法中。控制框图见图4。
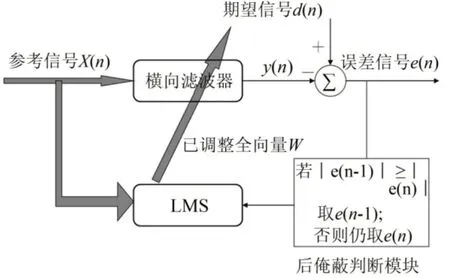
图4 Post-masking LMS算法车内噪声主动控制框图
同样可导出Post-masking LMS算法的三个基本迭代过程:
1)滤波输出表达式同公式(1);
2)误差信号修正表达式同公式(2);
3)滤波权值的自适应调整表达式如下

2.3 响度改善效果检验
仍选1.2节中样本信号R2为此Post-masking LMS算法的期望信号与参考信号,在Matlab中完成此算法对匀速30 km/h前排司机位右耳处噪声的抵消处理,误差信号参数见表2。从表2与图5中可以看出Post-masking LMS算法获得了响度3.35 sone的误差信号,比传统LMS算法减少了0.05 sone,响度水平进一步降低。
3 Post-maskingg LLMMSS算法效果检验
如1.2节所述,另选取采集的匀速30 km/h、40 km/h、50 km/h、70 km/h、80 km/h前排司机位右耳处噪声信号作为样本信号,每种车速下各采集一个样本,分别记为R3、R6、R11、R16、R20(对应关系见表3),利用LMS算法与Post-masking LMS算法分别进行消噪处理,计算得到误差信号的响度数据,结果见表3。表3表明了在车辆平稳行驶时,考虑了后掩蔽效应的Post-masking LMS算法比LMS算法会在前排司机位右耳处获得一个响度更低的降噪区,平均响度降低量为0.055 sone。图6显示了上述匀速车速下两种算法消噪结果即误差信号的响度比较。
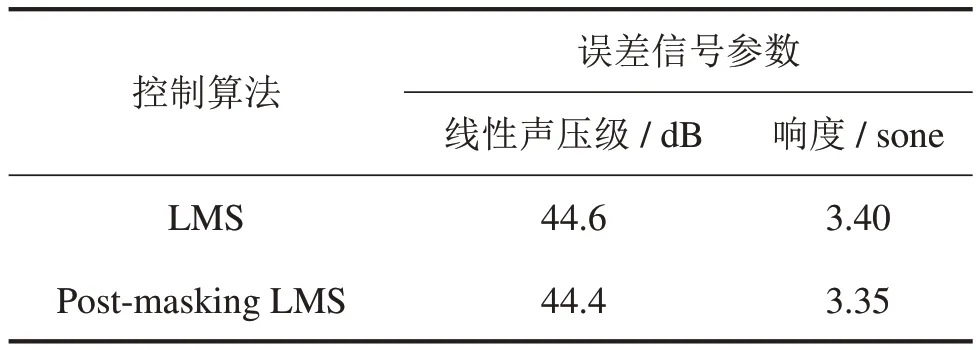
表2 匀速30 km/h不同算法所得误差信号对比
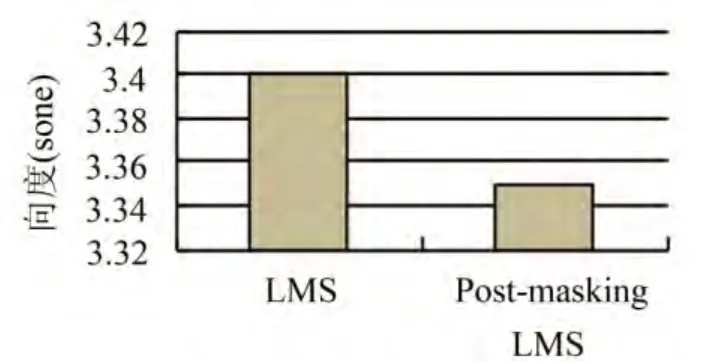
图5 30 km/h车速下两种算法所得误差信号比较
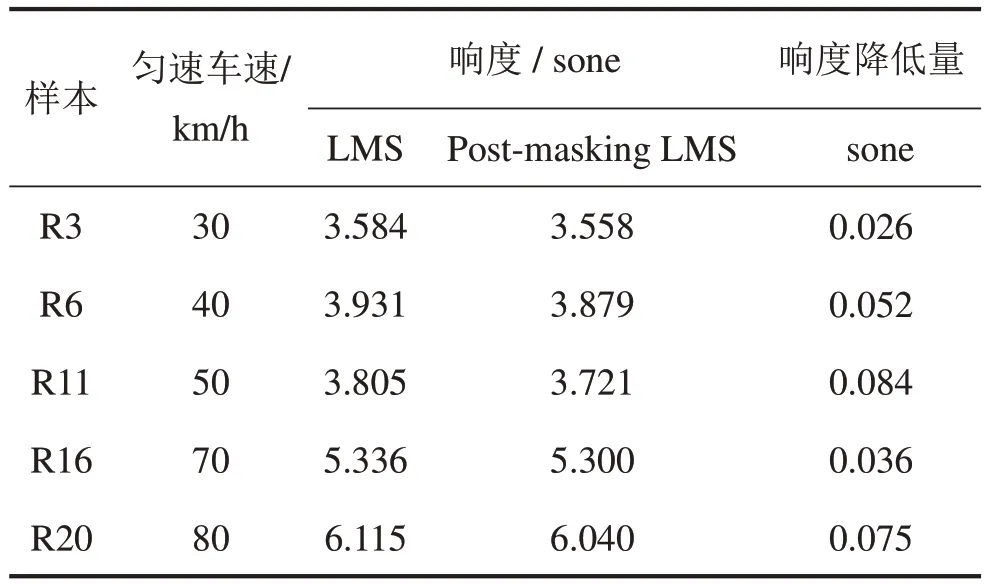
表3 不同车速下两种算法误差信号的响度对比
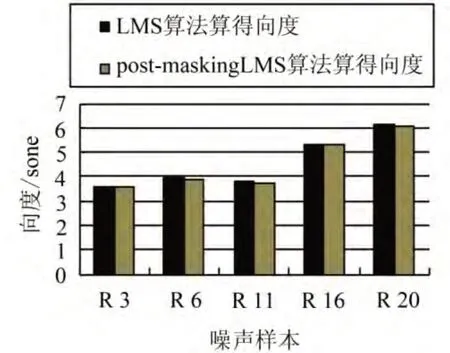
图6 不同车速下两种算法所得误差信号响度比较
4 结语
传统的车内噪声主动控制LMS算法的控制目标是保持声压值的均方最小,有一定的降噪量和车内声品质的改善,降低了车内噪声响度水平。而传统LMS算法忽略了人耳听觉的主观性,人耳感觉的声音响度与声音本身的声压值并不完全一致,为进一步改善车内噪声品质,提高乘客的舒适性,本文在LMS算法的基础上加入心理声学中的后掩蔽效应,在原LMS系统中加入后掩蔽判断模块,导出Postmasking LMS算法,使系统控制目标转变为改善噪声品质。在Matlab中对测得的车内噪声信号进行两种控制算法的有源控制仿真表明,Post-masking LMS算法能在LMS算法的基础上进一步降低噪声响度水平,改善车内噪声品质,获得了更好的乘客舒适性。
[1]王岩松,鄢守礼,邱 志.轿车车内噪声统计能量仿真与降噪方法研究[J].机械设计与制造,2011,(6):40-42.
[2]徐云峰,靳晓雄.车内噪声主动控制技术的研究[J].噪声与振动控制,2006,26(1):36-38.
[3]胡 啸,胡爱群,戴德超,等.机动车辆舱室内主动噪声控制系统的设计[J].电声技术,2001,(7):29-33.
[4]王峻廷.车内噪声主动控制的选择性消声方法研究[D].长春:吉林大学,2008.
[5]Pavithra S,Narasimhan S V.Feedback active noise control based on forward-backward LMS predictor[J].Signal,Image and Video Processing,2012(7):1083-1091.
[6]Hellman R,Zwicker E.Why can a decrease in dB(A)produce an increase in loudness[J].The Journal of the Acoustical Society of America1987,82(5):1700-1705.
[7]饶 伟.车内声品质评价模型的建立及应用研究[D].长春:吉林大学,2008.
[8]Sommerfeldt S D,Samuels T O.Incorporation of loudness measures in active noise control[J].The Journal of the Acoustical Society of America,2001,109(2):591-599.
[9]姜顺明,陈 南.以响度为度量的车内噪声有源控制[J].汽车工程,2008,(6):479-482;505.
[10]Hugo Fastl,Eberhard Zwicker.Psychoacoustics:facts and models[M].2 nd ed.New York:Springer,1999.
[11]Simon Haykin著,郑宝玉,等译.自适应滤波器原理第4版[M].北京:电子工业出版社,2010.
[12]刘宗巍,王登峰,姜吉光,等.用主动噪声控制法改善车内声品质[J].吉林大学学报(工学版),2008,38(2):258-262.
[13]Swanson M D,Tewfik A H,Boney L,et al.Robust audio watermarking using perceptual masking[J]. Signal Processing,1988,66(3):337-355.
猜你喜欢
听力学及言语疾病杂志(2020年2期)2020-05-20
电子制作(2019年11期)2019-07-04
电子制作(2018年16期)2018-09-26
电子制作(2018年16期)2018-09-26
电子制作(2018年1期)2018-04-04
中国传媒科技(2017年5期)2017-08-07
火控雷达技术(2016年3期)2016-02-06
火控雷达技术(2016年2期)2016-02-06
海军航空大学学报(2015年1期)2015-11-11
空间控制技术与应用(2015年3期)2015-06-05