
融合助力转向功能的新型主动转向系统LQG控制策略
2014-12-05 06:53:56赵万忠李怿骏于蕾艳谷霄月王春燕
中国机械工程 2014年3期
赵万忠 李怿骏 于蕾艳 赵 婷 谷霄月 王春燕
1.南京航空航天大学,南京,210016 2.中国石油大学,青岛,266580
0 引言
前轮主动转向系统能够对前轮施加一个不依赖驾驶员转向盘输入的附加转角,从而提高车辆的操纵性、稳定性和轨迹保持能力[1-2],并且通过变传动比控制和主动转向干预控制,使汽车获得较理想的转向特性,大大改善了汽车的操纵稳定性[3-4],这是当前转向系统发展的一个主要趋势。电动助力转向系统直接依靠电机提供辅助转矩的动力转向系统,通过助力控制、阻尼控制及回正控制,使汽车的转向路感和转向轻便性完美结合[5-7]。当驾驶员转动转向盘时,控制器可根据转矩传感器测得的信号调节助力大小,解决汽车操纵时轻便性和灵敏性的矛盾。
但是,传统的主动转向系统仍使用液压系统为转向提供助力,存在工艺复杂、能量消耗大、对密封要求严格、维护繁琐等问题。而现有的电动助力转向系统无法通过变传动比来提高汽车的操纵稳定性[8]。因此,设计一种新型主动前轮转向系统,以力与位移耦合控制的形式同时实现主动前轮转向和助力转向功能,将具有良好的应用前景及技术发展潜力。
由于转向系统中存在模型不确定性、路面干扰、传感器噪声等因素,传统控制方法很难确保驾驶员获得良好的转向路感并保证车辆的稳定性与安全性。PID控制虽然使用较为广泛,但是在控制非线性的复杂过程时效果不佳;H2控制在一定程度上弥补了PID控制的不足,提高了系统动态响应性能,但没有考虑系统的鲁棒稳定性[9-11];标准H∞控制虽然考虑了系统的鲁棒性能,但动态响应性能不佳。因此,有必要研究一种新型的主动转向路感控制方法,使新型主动转向系统具有较好的鲁棒性能和鲁棒稳定性,有效抑制路面随机激励、转矩传感器量测等引起的各种干扰和噪声,并保证驾驶员获得更为满意的转向路感。
LQG最优控制是现代控制理论的重要组成部分。LQG控制器本身具有很强的鲁棒性和一定的稳定裕度,相比H∞控制,它能够有效抑制传感器噪声和路面激励造成的干扰,并且具有较好的系统性能,此外,LQG性能指标能较好反映工程品质,物理意义清楚,因此LQG最优设计被工程界广泛采用。本文重点围绕新型主动转向系统的路感控制策略进行了研究分析和仿真验证,采用LQG控制方法设计了新型主动转向系统控制器,从而有效地抑制路面随机信号和传感器噪声所引起的干扰,提高了转向路感。
1 新型主动转向系统动力学模型
新型主动转向系统结构如图1所示。在新型主动转向系统中,行星齿轮机构具有两个自由度,当转向盘转动时,转向扭杆带动行星轮、太阳轮旋转,控制器根据传感器传来的转向盘转角、转矩以及车速等信号,控制转向电机带动行星齿轮齿圈旋转,从而在转向盘输入的基础上叠加了一个附加转角,实现变传动比功能;同时,控制器控制助力电机,通过涡轮蜗杆传动机构提供转向助力,实现电动助力转向功能。
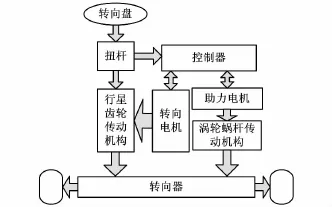
图1 新型主动转向系统结构
新型主动转向系统通过变传动比改善转向操纵性能并实现对车辆稳定性的主动控制,在低速时减小转向系统传动比,减小转向盘所需转角,以降低驾驶员的工作强度;在高速时增大传动比,使转向不过于灵敏,以降低驾驶员的工作压力,并且在紧急情况下主动修正驾驶员输入的转向角,提高了车辆的稳定性[12]。
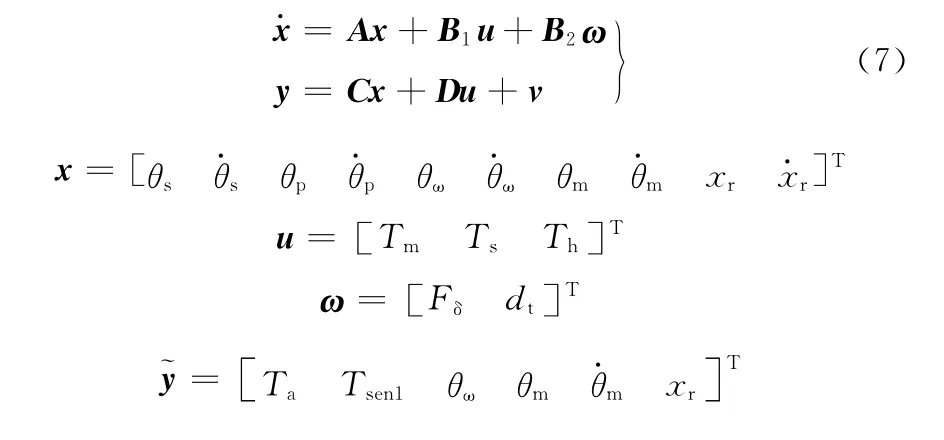
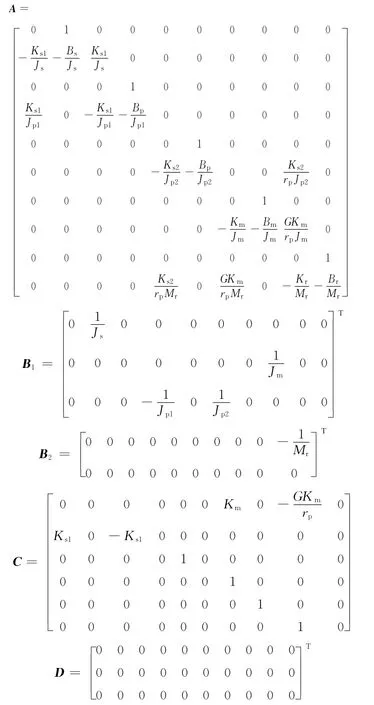
分别对新型主动转向系统的输入轴、转向电机、助力电机和输出轴进行动力学分析,得到如下系统动力学方程:

式中,Js为输入轴转动惯量;Bs为输入轴黏性阻尼系数;θs为输入轴转角;Th为转向盘转矩;Ks1为扭杆刚性系数;θP为转向伺服电机定子转角;Jp1为定子转动惯量;Bp为黏性阻尼;Ts转向伺服电机所产生的电磁转矩;θw为转向伺服电机转子转角;Jp2为转子转动惯量;Ks2为扭杆刚性系数;xr为齿条的位移;rp为小齿轮半径;Tm助力电机电磁转矩;G为涡轮—蜗杆减速机构的减速比;Km为助力电机和减速机构的输出刚性系数;Jm为助力电机转动惯量;Bm为电机阻尼系数;θm为助力电机转角;Fδ为路面的随机信号;Mr为减速机构、小齿轮和齿条等的当量质量;Br为减速机构、小齿轮和齿条等的当量阻尼系数;Kr为小齿轮、齿条和轮胎的等效弹簧的弹性系数;Tsen1为输入轴的反作用转矩;Ta为助力电机输出转矩。
2 LQG最优控制理论
考虑系统随机输入噪声与随机测量噪声的线性二次型最优控制称为线性二次型高斯控制,即LQG控制。
给定系统的状态方程与量测方程分别为

其中,x(t)为n维状态向量,u(t)为p维控制向量,y(t)为q维量测向量,A为n×n阶常数矩阵,B为n×p阶常数矩阵,G为n×p阶常数矩阵,C为m×n阶常数矩阵,D为q×p阶常数矩阵。假定w(t)为随机噪声干扰输入,是零均值的p维白噪声过程;v(t)为随机量测噪声,是零均值的q维白噪声过程。w(t)与v(t)过程均平稳且互不相关。
系统的性能指标为

式中,E()为数学期望;Q、R分别为对状态变量和输入变量的加权矩阵。
根据LQG问题的分离原理,LQG最优控制可以描述为两个方面问题的综合,即二次型调节器问题和最优估计器问题[13]。
分别求解两个独立的代数Riccati方程:

式中,P、P0分别为上述两个Riccati方程的正定对称解;Q0为模型噪声的协方差矩阵;R0为测量噪声的协方差矩阵。
可以得到最优状态反馈控制矩阵式与最优估计器:

式(5)中L为Kalman滤波器增益,且

分别计算LQG最优控制与最优估计,然后将这两个问题的解综合在一起,就得到LQG控制的最优解。LQG控制器模型如图2所示,其中,r为驾驶员转矩输入。
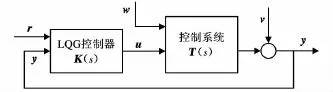
图2 LQG控制模型
3 新型主动转向系统LQG控制策略
3.1 新型主动转向系统LQG控制模型
在建立新型主动转向系统的模型时,需考虑模型本身的误差及不确定性,以及来自路面激励和传感器噪声的干扰。
为了使驾驶员获得良好的转向路感,并有效抑制各种干扰及噪声,设计转向路感控制状态方程如下:
3.2 新型主动转向系统LQG控制器
新型主动转向系统部分参数如表1所示。

表1 新型主动转向系统参数
在设计LQG最优控制器时,加权矩阵Q、R的选择关系到闭环系统的动态响应性能,不同的加权矩阵Q和R对新型主动转向系统的助力力矩与驾驶员所获得的转向路感有着不同的影响。在选择Q、R时遵循以下原则[14]:①如果想提高控制的快速响应特性,则可增大Q中相应元素的权重;②如果想有效地抑制控制能量的幅值及其引起的能量消耗,则可提高R中相应元素的权重;③Q、R的选择是相互制约的。
利用MATLAB鲁棒控制工具箱的函数lqr()可求得最优反馈增益矩阵Kc。然后利用函数lqe()求解Kalman滤波器状态估计增益矩阵L。最后利用函数reg()来求解LQG最优控制器。选取路面随机干扰方差为1×10-4N2·m2,传感器噪声方差为1×10-5N2·m2,通过多次的仿真调试后,确定合适的加权矩阵Q、R为
4 新型主动转向系统仿真分析
为验证LQG控制的效果和可行性,利用MATLAB/Simulink对LQG控制及 H∞控制时的新型主动转向系统进行了仿真试验。
通过研究新型主动转向系统对路面干扰和传感器噪声的响应,来分析系统对干扰噪声的抑制效果。图3所示为LQG和H∞控制下路面随机信号对助力力矩的脉冲响应。从图3可以看出:在H∞控制下的转向系统响应幅值大,而且稳定时间长,表明系统在受到路面随机干扰时会对助力力矩产生较大影响;在LQG控制下,新型主动转向系统在受到路面随机干扰时助力力矩所受到的扰动很小,并可以快速收敛,系统动态性能较好,表明在LQG控制下的新型主动转向系统能较好地抑制路面随机干扰,具有很好的鲁棒性。
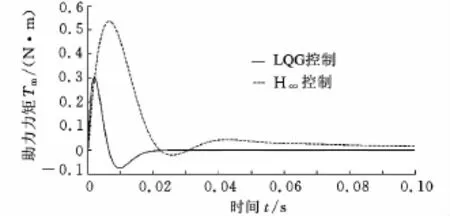
图3 助力力矩对路面随机干扰的脉冲响应
图4所示为LQG控制下与H∞控制下传感器噪声对助力力矩的阶跃响应,从图4可以看出,在LQG控制下新型主动转向系统的助力力矩对于传感器噪声的扰动所产生的响应很小。与此相比,H∞控制下传感器噪声对助力力矩的阶跃响应超调量较大,抑制效果不佳。这表明,LQG控制方法能较好地抑制传感器随机噪声对转向系统助力力矩的影响,从而使驾驶员较好的获取路面信息,优化转向路感。
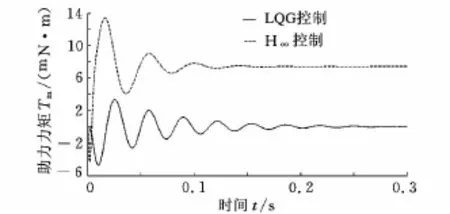
图4 助力力矩对传感器噪声的阶跃响应
如上所述,通过应用LQG控制方法,新型主动转向系统具有良好的鲁棒性,驾驶员也能获取较好的路感。
5 结论
(1)新型主动转向系统通过转向电机及双行星排机构控制系统的位移传递特性,实现主动转向功能;通过助力电机及蜗轮蜗杆传动机构控制系统的力传递特性,实现电动助力转向功能。通过对系统的力与位移耦合控制,使系统同时实现电动助力转向和前轮主动转向。
(2)考虑新型转向系统中可能存在的路面随机干扰与传感器噪声,构建新型转向系统LQG控制模型,设计了系统LQG控制策略。
(3)仿真结果表明,对比H∞控制,基于LQG的新型主动转向系统能够较好地抑制路面随机信号和传感器噪声对系统的干扰作用,保证系统具有较好的鲁棒性,使驾驶员获得满意的转向路感。
[1]李强,施国标,林逸,等.主动前轮转向控制技术研究现状与展望[J].汽车工程,2009,31(7):621-633.Li Q,Shi G B,Lin Y,Zhao W Z.Status Quo and Prospect of the Research on Active Front Steering Control Technology[J].Automotive Engineering,2009,31(7):621-633.
[2]陈德玲,殷承良,陈俐.基于状态观测器的主动前轮转向研究[J].中国机械工程,2007,18(24):3019-3023.Chen Deling,Yin Chengliang,Chen Li.Study on Active Front Steering Based on State-space Observer[J].China Mechanical Engineering,2007,18(24):3019-3023.
[3]Du H P,Zhang N.Control of Active Vehicle Sus-pensions with Actuator Time Delay[J].Journal of Sound and Vibration,2007,1/2(301):236-252.
[4]Fan C S,Guo Y L.Design of the Auto Electric Power Steering System Controller[J].Procedia Engineering,2012,29:3200-3206.
[5]Chen D L,Yin C L,Zhang J W.Modeling and Simulation of an Active Front Steering Using Lagrangian Dynamics[J].International Journal of Vehicle Autonomous Systems,2008,4(3):222-235.
[6]Hsu C T,Chen C S,Lin C H.Electric Power System Analysis and Design of Expanding Steel Cogeneration Plant[J].IEEE Transactions on Industry Applications,2011,6(47):2330-2342.
[7]Wang Z Y,Huang L H,Zuo Y,Zhang L L.Control for Uncertain System with Time-delay and Nonlinear External Disturbance via Adaptive Control Method[J].International Journal of Control,Automation and Systems,2010,2(8):266-271.
[8]Zhao W Z,Lin Y,Wei J W,et al.Control Strategy of a Novel Electric Power Steering System Integrated with Active Front Steering Function[J].Science China(Technological Sciences),2011,54(6):1515-1520.
[9]Zhao W Z,Wang C Y.Mixed H2/H∞Road Feel Control of EPS Based on Genetic Algorithm[J].Science China(Technological Sciences),2011,55(1):72-80.
[10]Kurishige M,Nishihara Q,Kumamoto H.A New Control Strategy to Reduce Steering Torque Without Perceptible Vibration for Vehicles Equipped with Electric Power Steering[J].Journal of Vibration and Acoustics,2010,132(5):054504.
[11]Zhao W Z,Wang C Y,Sun P K,et al.Integration Optimization of Differential Assisted Steering of Electric Vehicle with Motorized Wheels Based on Quality Engineering[J].Science China(Technological Sciences),2011,54(11):3047-3053.
[12]余卓平,赵治国,陈慧.主动前轮转向对车辆操纵稳定性能的影响[J].中国机械工程,2005,16(7):652-657.Yu Zhuoping,Zhao Zhiguo,Chen Hui.Influences of Active Front Wheel Steering on Vehicle Maneuverand Stability Performance[J].China Mechanical Engineering,2005,16(7):652-657.
[13]何仁,李强,郭孔辉.LQG理论的电动助力转向系统最优控制[J].农业机械学报,2007,38(2):18-21.He Ren,Li Qiang,Guo Konghui.Study on Optimal Control for Electric Power Steering System Based on LQG Theory[J].Transactions of the Chinese Society for Agricultural Machinery,2007,38(2):18-21.
[14]胡爱军,施国标,林逸.电动助力转向系统LQG/LTR控制[J].农业机械学报,2009,40(5):12-15,28.Hu Aijun,Shi Guobiao,Lin Yi.LQG/LTR Control for Electric Power Steering System[J].Transactions of the Chinese Society for Agricultural Machinery,2009,40(5):12-15,28.
猜你喜欢
英语世界(2022年9期)2022-10-18 01:11:18
汽车实用技术(2022年14期)2022-07-30 06:13:42
汽车实用技术(2022年4期)2022-03-07 06:07:20
金桥(2020年9期)2020-10-27 01:59:44
中学生数理化(高中版.高考理化)(2020年3期)2020-05-30 12:26:32
四川冶金(2018年1期)2018-09-25 02:39:26
商周刊(2017年17期)2017-09-08 13:08:58
公民与法治(2016年4期)2016-05-17 04:09:26
通信电源技术(2016年1期)2016-04-16 04:57:26
电机与控制应用(2015年3期)2015-03-01 03:49:59
