基于时延差的声纳浮标阵定位仿真*
2014-12-02 06:06:58
舰船电子工程 2014年9期
(海军潜艇学院 青岛 266071)
1 引言
航空反潜凭借其机动快速、安全性高等特点在反潜作战中发挥着重要作用。在搜索潜艇过程中,反潜机可以使用声纳浮标、吊放声纳等设备。主动声纳浮标虽具有探测精度高的特点,但是容易被敌潜艇侦察到进而进行规避,对抗反潜机侦测。被动声纳浮标通常只能进行定向,无法定位,但是凭借其隐蔽性高效性的特点在反潜对抗中发挥重要作用。在我国海军奔向深蓝的征途中,执行远海反潜任务时,反潜机携带声纳浮标能迅速到达指定海区完成任务,可将机动性的优势转化为战场优势。
2 被动声纳浮标时延差法对目标定位分析
假设目标位置与声纳浮标位置关系如图1所示。
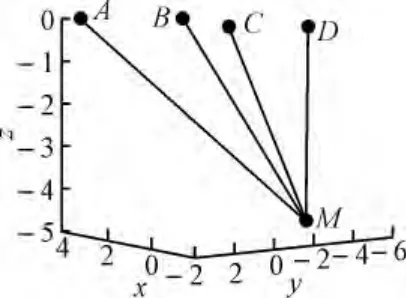
图1 阵元空间关系示意图
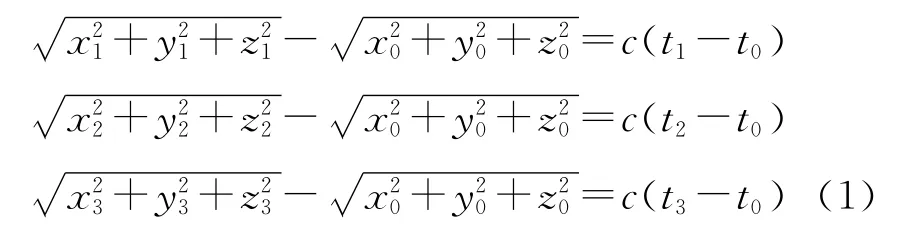
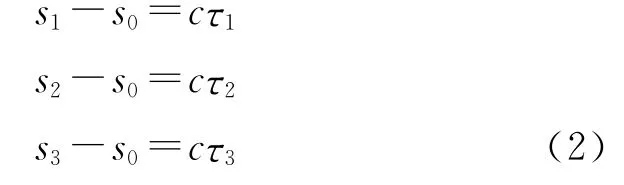
M点为敌潜艇位置,其坐标为M(x,y,z),反潜机投放的被动声纳浮标坐标分别为A(x0,y0,z0),B(x1,y1,z1),C(x2,y2,z2),D(x3,y3,z3),在陆地上调节水听器没入海面深度,使四个水听器具有相同的纵坐标,则声纳浮标在一定空间位置内可认为四个声纳浮标纵坐标均为0。目标到达水听器距离为s0,s1,s2,s3,发出噪声信号到达水听器时间分别为t0,t1,t2,t3,则可近似可得[1~3]:
令τ10=t1-t0,τ20=t2-t0,τ30=t3-t0,则有:
已知时延差,取一点为坐标原点,其他三个传感器空间坐标为

第i个传感器到参考传感器的时延差为τi,τ0为目标到参考传感器的时间,目标坐标为xT=[xT,yT,zT]T,则有:

其中‖x0‖2表示x的L2范数。
由空间几何关系知:
写成矩阵形式则有:
RM×N表示M个元组的集合,每个元组有N个元素。对于M=3的情况,A是满秩的,因此可以利用式(5)得:

代入式(3)得

令

则式(12)变为

上式为变量s的一个标量二次方程。此处的s为目标到参照传感器之间的距离,且为正数。则由此可以得出目标的距离,将其代入式(11)中可以得到目标方位坐标[4~5]。
3 插值法提高时延估计精度
以三元直线阵为例,设目标距离参考阵元为r,阵元间距为d,目标与阵元直线夹角为θ,则远场下,距离r为

估计量的方差:

其中l=dcosθ称为等效基阵的半长,Carter曾证明过其接近克拉美罗下界[6~7],式(16)开方可以写成:
该式等价于:

由误差分析知,时延估计精度对目标定位精度影响较大。原始信号经滤波后进行数据采集,采用互相关法估计时延差。数据采集速度受硬件条件制约,因此可以采用插值法增加数据点数,提高时延估计精度。也可以通过提高阵元间距来提高时延估计精度[8~9]。
对时延估计的仿真如下:
截取频率为8000Hz的wav音频信号作为目标噪音信号,并由Matlab采集。构造0.6506s延迟信号,对两路信号做互相关分析,并对两路信号进行Lagrange差值处理后进行互相关时延估计,分析两次时延估计值。仿真结果如下:
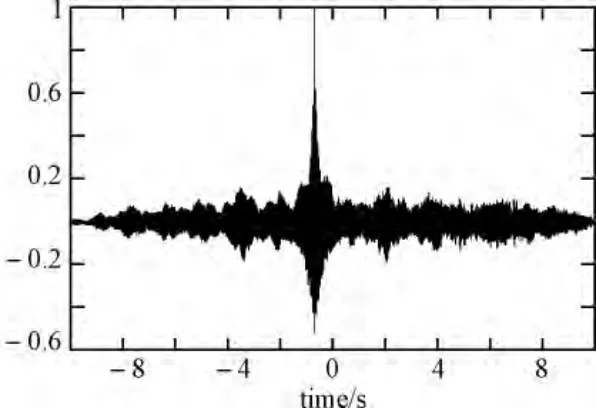
图2 无插值下互相关时延估计
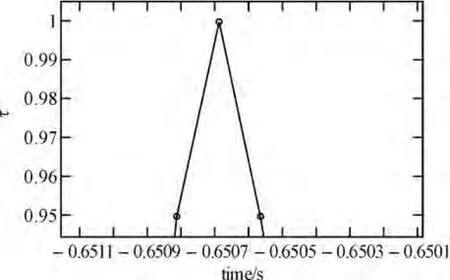
图3 无插值下相关峰示意图
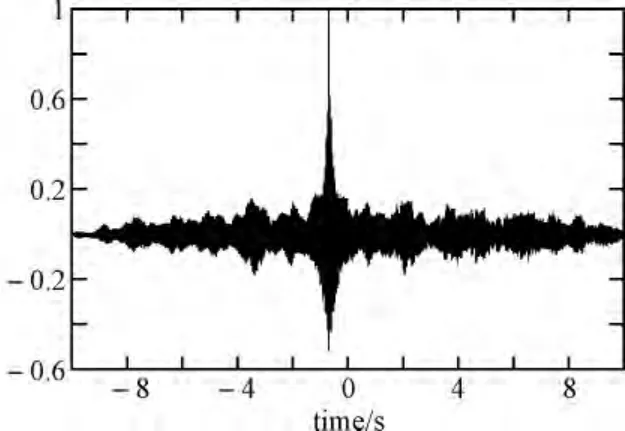
图4 Lagrange插值后互相关时延估计
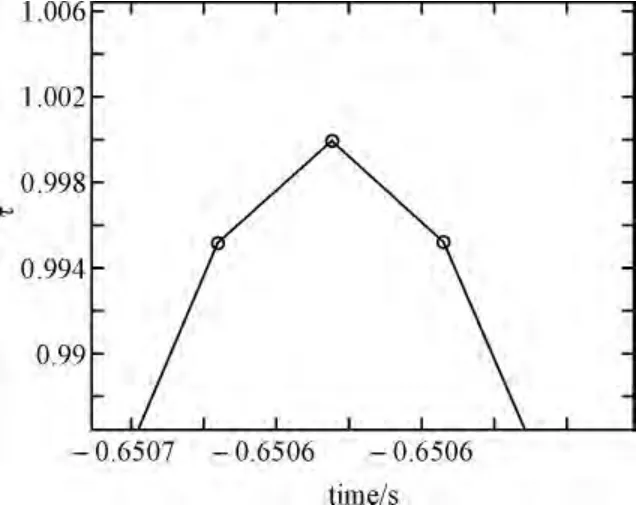
图5 Lagrange插值后相关峰示意图
在数据采集过程中,设采样频率为Fs,则相邻点的时间间隔为1/Fs,时延估计间隔最大误差为1/2Fs。由Runge定理知,当插值点过多时误差增大,因此取四点内插较为理想。由仿真结果可知,在无内插情况下,相关峰峰值位于0.6507s处,采用内插后,相关峰回归到0.6506s位置,时延估计精度提高。
4 结语
本文对四元被动声纳浮标阵的定位原理进行了阐述,分析了影响该方法的主要误差因素,得出通过插值法可以提高时延估计精度进而提高定位精度的结论,并对插值法进行了仿真。本文所采用的仿真数据都是在理想条件下进行的仿真。在未来反潜作战中,基于隐蔽性的反潜搜索将发挥越来越重要的作用。声纳浮标被动工作可以达到隐蔽性要求,但是由于其位于海表,受海表各种反射信号干扰较大,定位精度不高[10]。通过被动定位阵能够抑制部分反射信号,减少干扰,提高定位精度,对反潜搜索过程有一定的帮助[11]。
[1]王新勇.互谱法被动测距改进研究[D].哈尔滨:哈尔滨工程大学,2004.
[2]刘聪锋.无源定位与跟踪[M].西安:西安电子科技大学出版社,2011:27-32.
[3]熊辉,雷斌.被动定位系统中时延估计算法的仿真分析[J].技术平台,2011(3):47-49.
[4]王昭,李宏,赵俊渭,等.空气声被动定位的误差分析[J].应用声学,2000,19(2):39-43.
[5]毛卫宁.水下被动定位方法回顾与展望[J].东南大学学报(自然科学版),2001,31(6):129-132.
[6]王成,李少洪,王鑫全,等.测时差被动定位算法的研究[J].系统工程与电子技术,2001,23(11):9-12.
[7]马雯,黄建国.广义相关时延估计在被动定位系统中的应用研究[J].探测与控制学报,2000,22(3):51-54.
[8]殷世民,付小宁,刘上乾,等.对固定平台红外单站被动定位技术研究[J].光子学报,2004,33(2):237-239.
[9]崔玮玮,曹志刚,魏建强,等.声源定位中的时延估计技术[J].数据采集与处理,2007,22(1):90-99.
[10]童峰,许肖梅,方世良,等.一种单频水声信号多径时延估计算法[J].声学学报,2008,33(1):62-68.
[11]行鸿彦,唐娟.时延估计方法的分析[J].声学技术,2008,27(1):110-114.
猜你喜欢
电声技术(2022年3期)2022-04-28 00:22:50
小哥白尼(军事科学)(2022年1期)2022-04-26 14:02:42
考试与评价·八年级版(2020年5期)2020-10-29 05:42:35
应用科技(2020年1期)2020-06-18 02:02:36
装备制造技术(2020年12期)2020-05-22 09:24:54
小哥白尼(趣味科学)(2019年6期)2019-10-10 01:01:38
小学科学(学生版)(2019年6期)2019-07-10 00:52:16
电子测试(2018年14期)2018-09-26 06:04:12
无人机(2017年10期)2017-07-06 03:04:38
火控雷达技术(2016年2期)2016-02-06 02:29:03