六旋玻璃瓶封口机的设计
2014-12-01 07:55陈义厚
长江大学学报(自科版) 2014年29期
陈义厚
(长江大学机械工程学院,湖北 荆州434023)
罐藏食品在我国有着悠久的历史。如何保证瓶内食品的质量完好、提高在加工过程中的效率,是厂商必须考虑的一大因素。本研究对六旋玻璃封口机的结构和工作原理,并对关键参数进行了优化设计。
1 主要结构及工作原理
六旋玻璃瓶封口机是对螺旋玻璃瓶进行封口的一种机械,它能很方便地将排走真空的罐头食品进行封盖,其封口力矩可调,封口性能稳定,操作方便。该机由V带传动、摩擦离合器、抱瓶机构、升降机构和旋盖装置等组成(图1)。
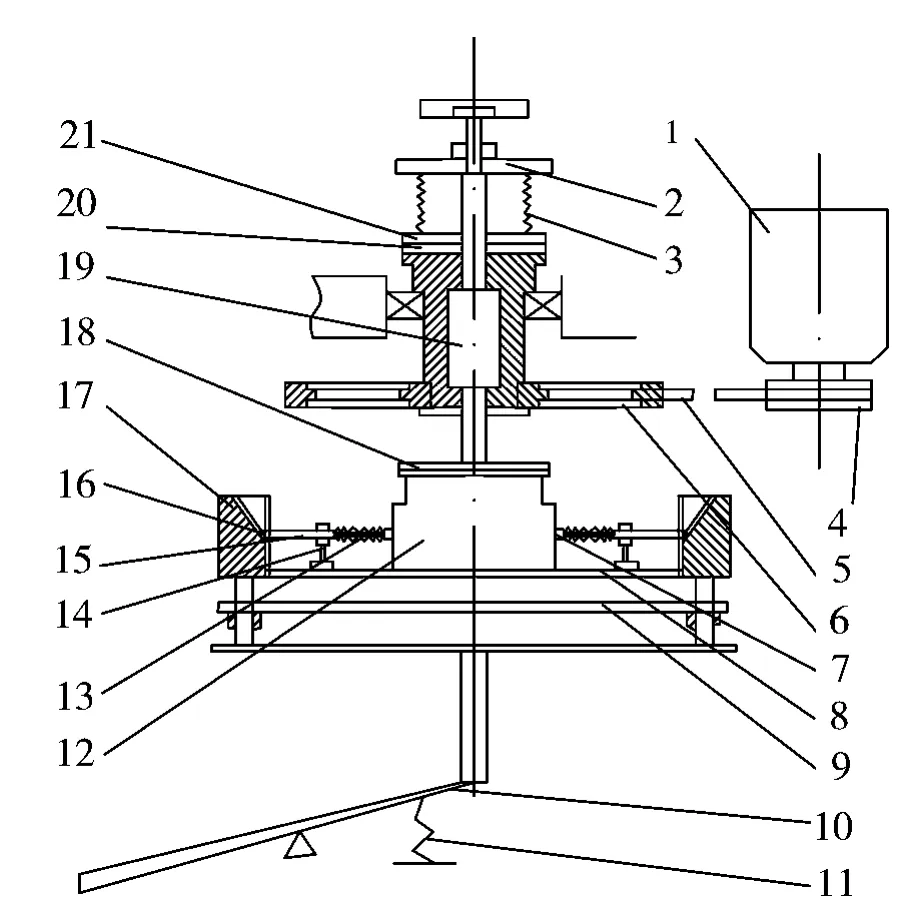
图1 六旋玻璃瓶封口机示意图
六旋玻璃瓶封口机的工作原理为:电机1通过V带5带动摩擦离合器20、21旋转,摩擦离合器带动旋盖头18转动。经热排气后配盖的罐头12放到瓶托8上,踏下脚踏板10使滑槽块17上升,滑槽块上的斜槽推动抱瓶杆15向瓶中心移动,使抱瓶座7抱紧瓶子。然后瓶托随抱瓶机构一起上升,顶在旋盖头上,由旋盖头靠摩擦力带动盖转动,由于瓶被抱紧不动,从而把瓶盖拧紧在瓶上。当达到所需的拧紧力时,离合器从动片21克服离合器弹簧3的压力,沿主轴19上移而打滑。调整螺母2可以改变离合器弹簧3的压力,即拧盖力距的大小。松开脚踏板,在回位弹簧和自重作用下,瓶、瓶托及抱瓶机构下降,抱瓶杆回复到原位,封口结束。
2 设计与计算
2.1 封口机离合器的设计
玻璃瓶封口机在封口过程中,当瓶盖封紧时电机带动主轴继续旋转。此时,需有一机构使旋盖头的旋盖力与玻璃瓶盖分开,以免损坏玻璃瓶。离合器就能实现这一功能,使得机械能顺利封口。
摩擦式离合器离合平稳、柔顺无冲击,可在高的转速下进行离合,过载时打滑有安全保护作用,并有较高的适应性,故选用摩擦式离合器。
离合器是一种可以通过各种操纵方式,实现主从动部分在同轴线上传递运动和动力时具有接合或分离功能的装置。
离合器的计算转矩由此式计算:Tc=
式中,T—离合器的理论力矩,取T=7000N·mm;K—工作情况系数,由于玻璃瓶封口机是农业机械,根据离合器工作情况系数K的概略值可远取K=1.5;Km—接合频率系数,根据接合频率系数Km表值,取离合器每小时接合次数为240次,取Km=0.72;Kv—滑动速度系数,Kv=1.0。
在对摩擦片直径计算时,要考虑到轴的直径及与其的配合。根据强度条件可确定摩擦片外径:
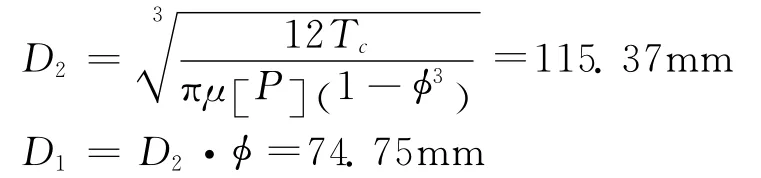
式中:摩擦系数μ取0.25;许用应力 [P]取0.2N/mm2;系数φ=0.65;D1为摩擦片的内径,mm;D2为摩擦片的外径,mm。圆整取D1=70mm,D2=115mm。
摩擦片数目:

式中,Kz—摩擦面对数修正系数,取Kz=1。
2.1.1 摩擦离合器的摩擦转矩
由Tμ=μPARv[1]可计算得出:
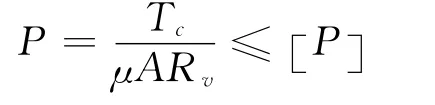
2.1.2 摩擦面的压紧力Q

式中,Tc—离合器的计算转矩,N·mm;m—摩擦面对数,取m=1;μ—摩擦系数;Rv——当量摩擦半径,mm。
2.1.3 摩擦式离合器的滑移边及耐磨性
离合器在接合时,主动片与从动片间有个滑移过程,必然引起磨损和发热,所以需对离合器进行磨损和发热校核。在滑移功计算中,假设接合开始时,主动轴角速度为额定角速度,ω1=πn/30,从动轴角速度ω2=0,产生的摩擦力矩Tf=KT,主动轴力矩和阻力矩都为额定力矩,则滑移功W 为[2]:
式中,Je—输入轴的转动惯量,由结构求得Je=0.305kg·m2;Jn—输出轴的转动惯量,由结构求得Jn=7.5×10-3kg·m2;ω1—额定角速度,
所以W =30.1J
单位面积上的滑移功A:
式中,F =π(R22-R21)=6.09×10-3m2。
计算得A=4.95×103J/m2<14.7×104J/m2,满足耐磨性要求。
2.2 抱瓶机构的设计
六旋旋玻璃瓶封口机在进行玻璃瓶封口时,当旋盖力达到瓶盖封紧所需要的力度后,摩擦离合器克服旋盖力矩,保护玻璃瓶。此时,抱瓶杆的夹紧力应该大于旋盖力,以至于玻璃瓶被抱瓶杆抱紧而不打滑。而此机械是一种封口为Φ40mm~Φ200mm的六旋玻璃瓶封口机。在设计过程中,对抱瓶机构的结构尺寸都有严格的要求[3-4]。
2.2.1 滑槽的设计
封口时最大瓶为Φ200mm,最小瓶为Φ40mm,而抱瓶杆长度不变,所以滑块最大行程AB=80mm,滑槽斜角∠ABC=60°,根据勾股定理,得到AC=139mm,AB=80mm,BC=160mm,为了防止滚子脱出滑槽,取AC=140mm。其结构图如图2所示。
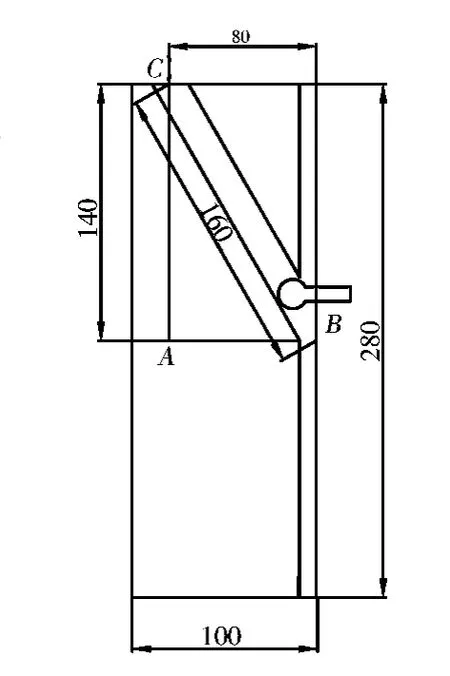
图2 滑槽的结构
2.2.2 抱瓶杆的设计
瓶托与支架是连接不动的,抱瓶杆滚子一端在滑槽中滑动时,抱瓶杆在滑槽内升缩,其长度BD应大于80mm,否则当抱瓶杆滑动到滑槽块的最顶端时,滚子就有可能滑出滑槽块,为了机械能顺利工作,取BD=100mm。而在抱瓶爪的一端,弹簧尺寸松开时应小于80mm,取抱瓶爪设计成弧形,抱瓶弹簧松开时,其长度应小于AB长度,以免弹簧力过大,致使支架与滑槽接触产生摩擦力,影响封口,因此,BC应小于80mm,取BC=70mm。
2.2.3 脚踏力的计算
在设计中应考虑脚踏力的大小,一般脚伸出时的力,男工应小于488N,女工应小于350N,因此应对该机脚踏力进校核。否则,当工人在工作中,就会工作用力过大,耗费体力太多而工作劳累。
在夹紧过程中,取770g六旋玻璃瓶的最大开启力矩为7N·m,为保证在封口时瓶不转,也就是抱紧机构与瓶的摩擦力矩应大于7N·m,则抱瓶座的正压力Q1为:
式中,f—摩擦系数,f=0.5;d—瓶直径,d=0.095m;T—离合器的理论力矩,取T=7000N·mm。
计算得:Q1=147.37N
抱瓶杆是由倾角60°的斜槽推动,那么使滑槽块上升的推力F1=2Q1tg60°=510.5N。
考虑上升部分的重力,回位弹簧的接力及稳中有降部分的摩擦力,取F2=100N。设计脚踏板杠杆比为2∶1,则脚踏力F为:

当瓶、瓶托上升时,瓶已夹紧。因此,在封口时,脚踏力用来提供盖与封盖头一起旋转所需的正压力F3,以及用来克服整个上升部分的重力F4和回位弹簧的拉力F5,设计F4+F5=150N,盖与封盖头接触,R2=41mm,R1=25mm,摩擦半径Rv=33.165mm,摩擦系数f=0.16,则F3=Tf/Rv=346.174N,那么脚踏力F=(F3+F4+F5)/2=248.14N<350N。
[1]李修渠.半自动玻璃瓶封罐机的改进 [J].食品与机械,1995,(5):29-33.
[2]孙风兰.食品包装机械学 [M].哈尔滨:黑龙江科学技术出版社,1990:179-182.
[3]孙世昌.双重偏心式卷封机构的滚轮运动轨迹和轨迹方程 [J].食品机械,2002,(3):22-23.
[4]林瑞春.封罐机滚轮机构的改进 [J].食品机械,2000,(5):29-33.
猜你喜欢
红领巾·萌芽(2022年9期)2022-11-24
科技与创新(2021年15期)2021-11-28
物流技术与应用(2021年1期)2021-03-22
科学大众(2020年12期)2020-08-13
工程技术研究(2020年18期)2020-03-10
少儿美术(2019年12期)2019-12-14
小学生(看图说画)(2018年3期)2018-10-30
新能源科技(2018年6期)2018-02-15
时代农机(2018年5期)2018-02-01
学生天地(2017年12期)2017-05-17