船舶港内掉头操纵的简捷鲁棒控制
2014-11-30 03:47张显库张国庆
中国航海 2014年2期
张显库, 张国庆
(大连海事大学 航海学院, 辽宁 大连 116026)
船舶港内掉头操纵的简捷鲁棒控制
张显库, 张国庆
(大连海事大学 航海学院, 辽宁 大连 116026)
为实现船舶在港内的自动掉头,进一步完善包含风浪干扰的低速、浅水、非线性船舶运动数学模型,基于闭环增益成形算法设计简捷鲁棒控制器。用S函数建立船舶运动数学模型,并在MATLAB/Simulink仿真环境中进行系统仿真实验。在考虑港内掉头区域限制后,给出船舶在浅水、低速条件自动掉头的仿真结果。仿真结果表明,在5级风以内,所给船舶能在3倍船长(500 m左右)的区域内以低速实现港内的自动掉头操纵,对相关船舶的自动掉头控制具有一定的参考价值。
水路运输; 船舶; 掉头; 鲁棒控制; 闭环增益成形
船舶自动靠离泊操纵控制是船舶运动控制的研究热点,而船舶港内自动掉头操纵是其重要的研究内容之一。船舶在港内经常需要将航向掉转较大的角度(一般为180°),这种操纵称为港内掉头操纵。[1]例如,船舶在顺靠码头的情况下,离港时需要掉头操纵等。船舶在港内航行不同于在其他水域航行,其本身存在浅水效应、岸壁效应、舵效差、易受外界干扰影响等特点。当前,万吨级以上的船舶在进出港时一般借助拖船进行掉头操纵,优点是能够保证在受限区域内顺利完成掉头、安全性好,不足是操纵过程耗时较长且花费较大。国内外关于船舶在受限水域进行自动掉头控制的研究较少,文献[2]给出船舶在狭窄水域进行手动掉头操作的经验和要点;文献[3]研究船舶进出港低速浅水的运动数学模型及航向保持控制,但不涉及受限水域船舶掉头的自动控制;文献[4]给出船舶大幅度转向控制器的设计及优化方案,但没有考虑低速和浅水效应。本文在上述研究和文献[5]的基础上,利用简捷鲁棒控制理论实现一定海况下港内受限水域低速浅水时的船舶自动掉头控制,对航海工程应用具有重要的参考价值。
1 低速、浅水域船舶运动数学模型
船舶在进行港内掉头操纵时,由于航速较低、水深受限、风浪影响大,装备执行效力较差。自力掉头时可采用操舵旋回掉头的方式,但因港内情况复杂,掉头区域受到限制(一般要求横向范围小于3倍船长,仅适用于小型船舶、气象条件较好、水域较为宽阔的情况)。万吨级船舶进行掉头操纵时一般靠拖船辅助,本文在文献[3]建立的低速浅水船舶运动数学模型的基础上,加上船舶的舵机特性和位置输出,研究自动掉头的可能性。
舵机特性由一阶惯性系统描述,舵角限制为±30°,低速浅水域的船舶运动数学模型[3]为
(1)
(2)
(3)
(4)

式(1)可方便地加上非线性力和风、浪的干扰,详细算法参见文献[6-8]。
以“Mariner”轮为例进行讨论,其主要尺度为:两柱间长160.93 m,船宽23.17 m,吃水8.23 m,方形系数0.588,舵叶面积30.012 m2,排水量18 541 m3,航速15 kn。参数T1,T2,T3,K0,T0与航速、水深的关系见表1,H/d为水深与船舶吃水比。
式(1)和式(2)在实现时采用MATLAB的S函数编程;式(2)在编程时输出都除以船长,目的是给出相对于船长的位置输出。
2 船舶港内掉头简捷鲁棒控制
掉头控制分成两部分:
1. 180°大角度转向的前馈控制,采用与文献[4]相同的算法。

表1 不同水深下的K, T参数表
2. 采用基于闭环增益成形算法的简捷鲁棒控制。[9-15]
因为掉头横向区域受到3倍船长(500 m左右)的限制,故采用文献[15]给出的大惯性船舶航向保持的改进简捷鲁棒控制,以加快转向及掉头进程,使转向区域满足受限要求。
最后的控制器形式为

(5)
式(5)中:Tc=4 s,以使系统带宽频率(约1/Tc)小于海浪的高频干扰(0.3~1.25 rad/s),充分抑制海浪干扰的影响;ρ的引入能够提高闭环系统的响应速度,其需经过多次仿真尝试才最终确定。ρ选择过大容易导致被控变量产生一定的超调,过小则不能有效提高系统响应速度,此处选择ρ=5。式(5)的推导及分析证明见文献[15]。
3 仿真研究
图1给出用MATLAB 6.5中的Simulink实现的系统仿真框图,Subsystem模块为经封装的前馈控制模块,Gain和Gain1为弧度转换为度的增益系数,单击三个按钮分别给出输入水深、船速、风力和风向的图形界面,船舶模型sfunship1为包含舵机特性和风浪干扰的非线性船舶运动数学模型。在船速输入界面中,微速、慢速、半速和全速分别代表10%的航速、30%的航速、50%的航速和100%的航速,以单选钮的形式进行选择。船形绘制是基于船舶参数,采用单独的MATLAB程序实现的,接收图1产生的位置坐标和艏向坐标,最后利用plot函数绘制。
仿真条件为浅水(15 m)、慢速(4.5 kn)航行、5级风。图2~图5给出了5级风、不同风向角下的仿真结果,其中船舶轨迹图中的横纵坐标为与船长之比的相对坐标。
从仿真结果可以看出,5级风下“Mariner”轮能够顺利完成自动掉头操纵(艏向角掉转180°);港内掉转过程中船舶运动轨迹不超过3倍船长(3L)。操纵初期,为实现快速转向,平均约有2 min的30°大舵角操纵,然后维持在平均10°的舵角以克服由于一侧受风而产生的风力转船力矩,这在某种程度上说明提出简捷鲁棒控制算法的正确性,平均约7 min完成船舶的掉头操纵。
此外,还进行了8级风、不加前馈控制、不加ρ、微速浅水、慢速超浅水(12 m)等条件下的仿真实验,因篇幅有限,不给出仿真曲线,直接给出仿真结论。
1. 8级风时也能实现受限区域的自动掉头操纵,但因操大舵角时间长达10 min以上,船舶横摇加剧会影响船舶航行安全,在实践中应尽量避免这种操舵方式。
2. 不加前馈控制的效果与已给出的仿真结果差不多,区别是平均增加30 s的大舵角操纵。
3. 不加ρ可实现船舶的自动掉头操纵,但所需水域超过3倍船长。
4. 微速浅水也可实现船舶的自动掉头操纵,但所需水域超过4倍船长。
5. 慢速超浅水(12 m)时难以实现自动掉头操纵,但慢速浅水(13 m)时可以实现受限水域的自动掉头操纵。
基于多次仿真试验和分析得出以下结论:理论上,船舶在5级(包括5级以下)海况下可采用港内自动掉头操纵;6级海况及以上不建议采用自动掉头控制。
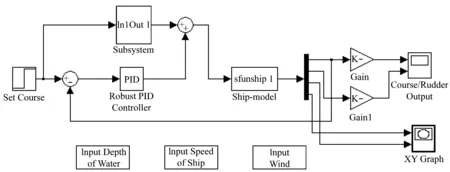
图1 船舶港内自动掉头控制仿真框图
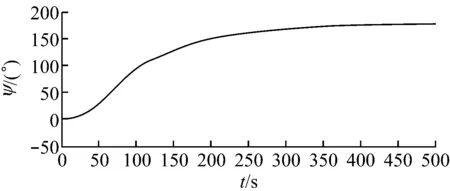
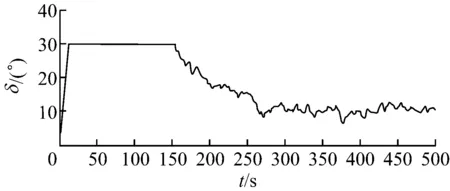
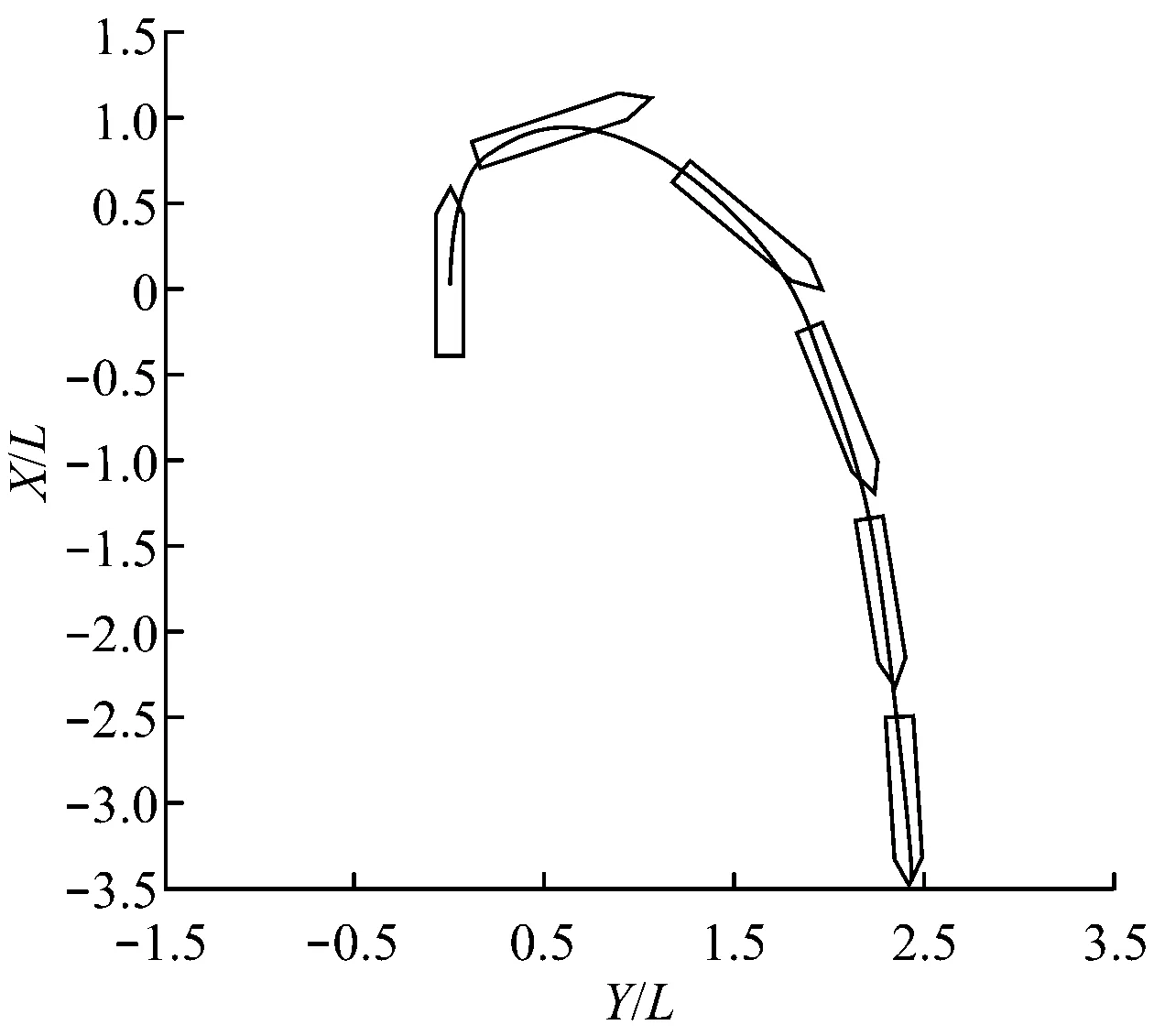
图2 风向045°时的仿真结果
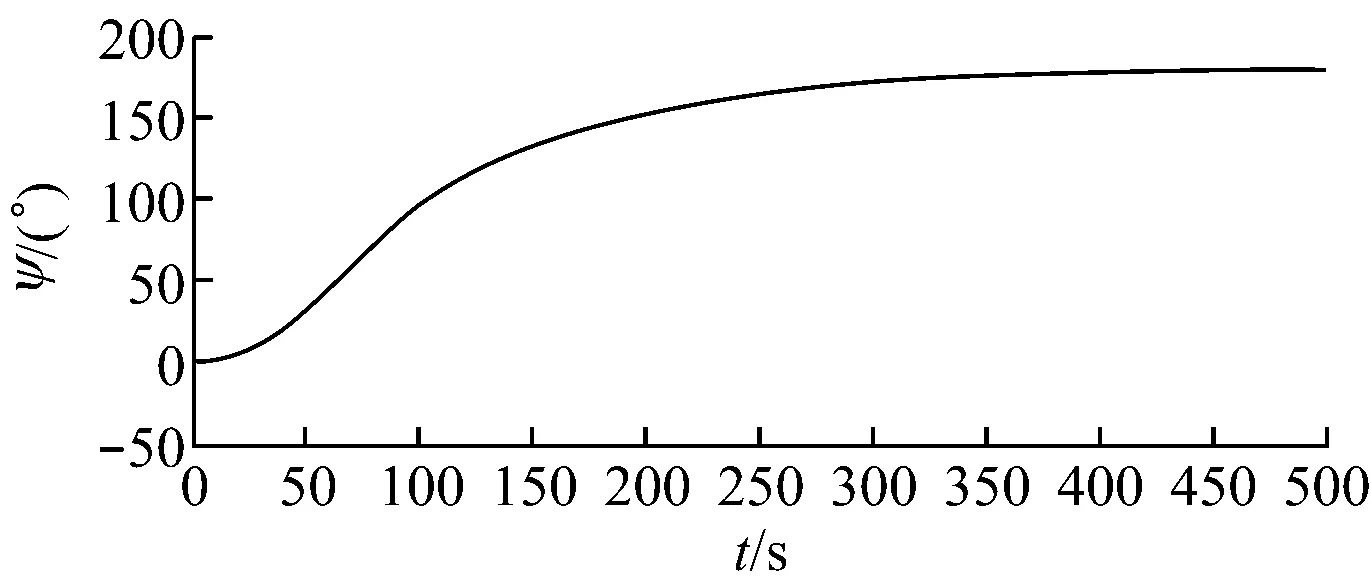
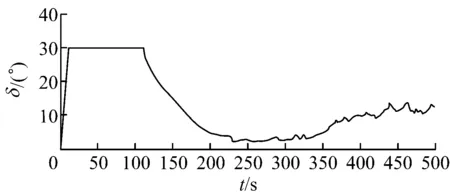
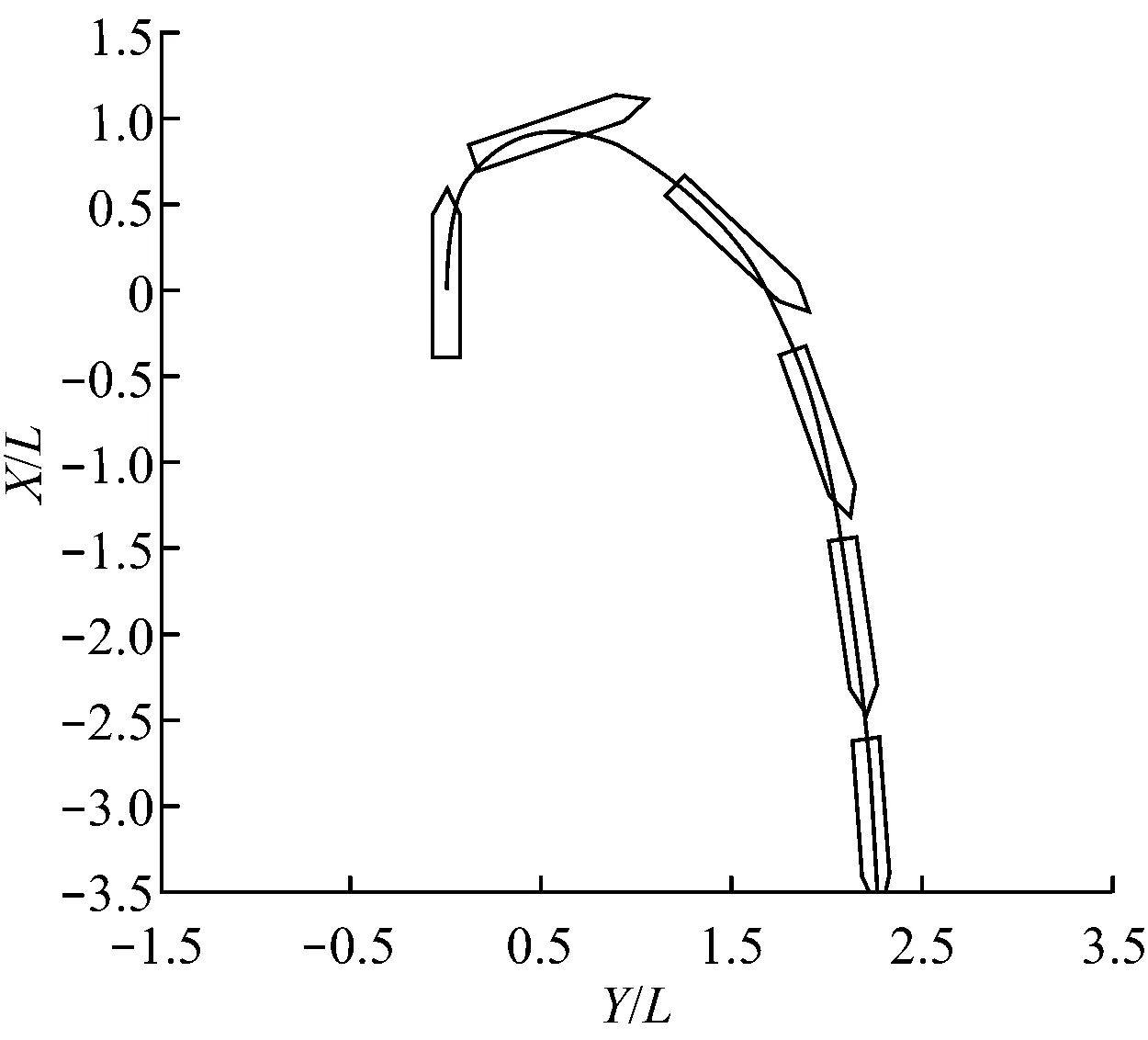
图3 风向135°时的仿真结果
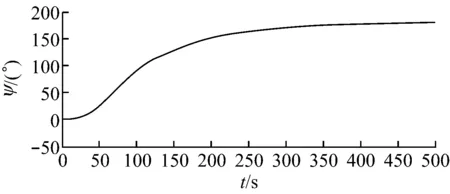
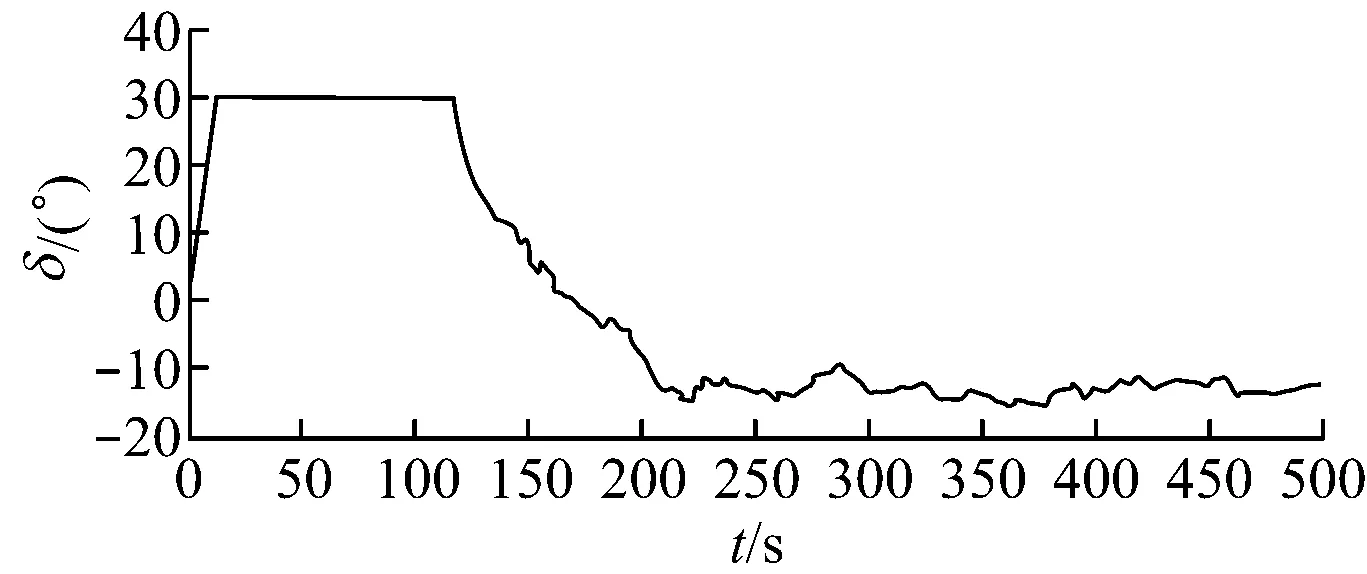

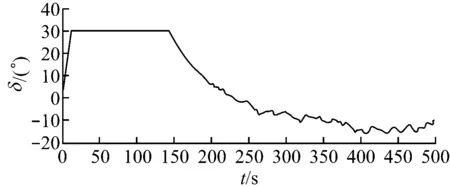
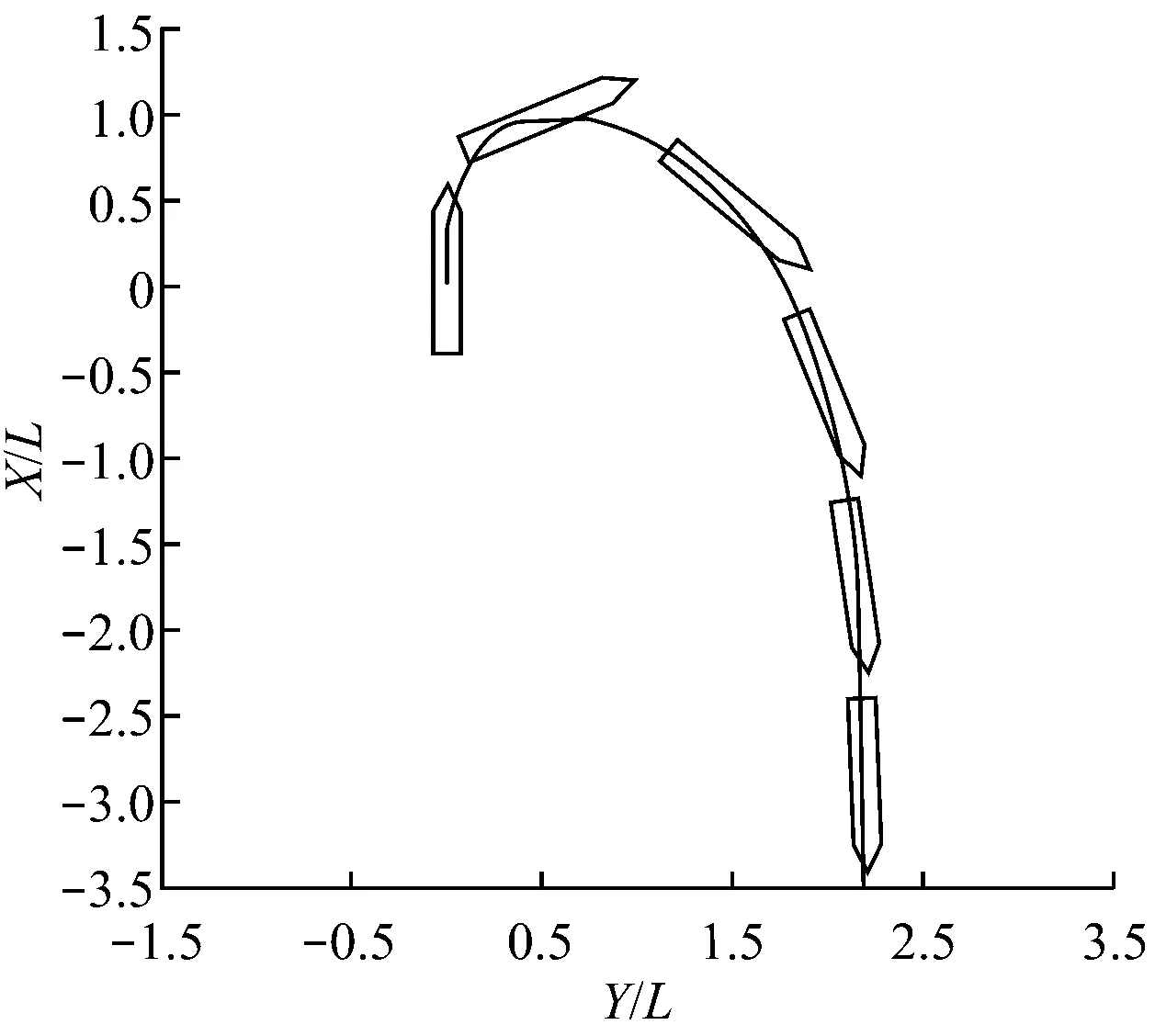
图5 风向315°时的仿真结果
4 结 语
船舶进出港时,由于处于浅水域,仅能以较小的富余水深和较低的速度航行,故船舶运动参数变化很大,其掉头自动控制较困难。本文用前馈控制和闭环增益成形算法设计一种简捷鲁棒控制器,实现船舶进出港自动掉头控制。采用六维的包括风浪干扰的非线性船舶运动数学模型,将航速和水深数据融入到数学模型中,控制器为修正的鲁棒自适应PID(Proportional Integral Differentional)控制器,PID参数与船舶模型的K、T指数,航速和水深有关。考虑水深、航速、风、浪、非线性力等因素的影响,用MATLAB编程实现船舶模型的K、T指数随水深、航速的变化关系,并用S函数编程实现六维船舶运动非线性数学模型,最终使得设计的简捷鲁棒控制器具有适应性和鲁棒性。
[1] 洪碧光. 船舶操纵[M]. 大连:大连海事大学出版社, 2008.
[2] 孙陆明. 船舶在狭窄水域掉头时船位的控制及操作[J]. 航海技术, 2010(1):22-24.
[3] 张显库, 肖惟楚, 郭晨. 船舶进出港低速航向保持[J]. 交通运输工程学报, 2005, 5(4):77-81.
[4] 张显库, 赵翔宇. 船舶转向的鲁棒控制及其优化设计[J]. 哈尔滨工程大学学报, 2006, 27(3):319-322.
[5] 李松, 孔凡邨, 关克平. 警戒区水上交通冲突数据自动采集系统[J]. 交通运输工程学报, 2011, 11(2):121-126.
[6] 贾欣乐, 杨盐生. 船舶运动数学模型-机理建模及辨识建模[M]. 大连:大连海事大学出版社, 1999.
[7] 张显库, 金一丞. 控制系统建模与数字仿真[M]. 第2版. 大连:大连海事大学出版社, 2013.
[8] 张显库. 船舶运动简捷鲁棒控制[M]. 北京:科学出版社, 2012.
[9] 张显库. 船舶控制系统[M]. 大连:大连海事大学出版社, 2010.
[10] ZHANG Xianku, JIA Xinle. Simplification ofH∞Mixed Sensitivity Algorithm and its Application[J]. Automatic Control and Computer Sciences, 2002, 36(3):28-33.
[11] 张显库, 吕晓菲, 郭晨, 等. 船舶航向保持的鲁棒神经网络控制[J]. 船舶力学, 2006, 10(5):54-58.
[12] 张显库, 金一丞. 汽车运输船的响应型非线性数学模型[J]. 哈尔滨工程大学学报, 2007, 28(5):487-490.
[13] 张显库. 基于Lyapunov稳定性的船舶航向保持非线性控制[J]. 西南交通大学学报, 2010, 45(1):140-143.
[14] ZHANG Xianku, WANG Xinping. Concise Nonlinear Robust Control of Course Keeping for Ships[J]. ICIC Express Letters, 2010, 4(4):1263-1268.
[15] 张显库, 关巍. 大惯性船舶航向保持的改进简捷鲁棒控制[J]. 中国航海, 2010, 33(3):1-5.
ConciseRobustControlforShip’sTurningManoeuvringinHarbor
ZHANGXianku,ZHANGGuoqing
(Navigation College, Dalian Maritime University, Dalian 116026, China)
In order to realize automatic in-harbor turning around of vessels, the nonlinear low speed and shallow water mathematical model of the ship motion with the wind and wave disturbances is improved and realized through programming its S-function. The concise robust controller is designed using closed-loop gain shaping algorithm. The simulation of the system within restrictive swinging spaces is implemented with MATLAB/Simulink. The simulation results show that the ship turns around succesfully in low speed within triple ship length (e.g., 500 m) under Beaufort wind scale of 5 in the harbor envirenment. This study can be an useful reference for developing automatic turning-around control of vessels.
waterway transportation; ship; turning around; robust control; closed-loop gain shaping
2014-03-28
国家自然科学基金(50979009);国家重点基础研究发展计划(“九七三”计划)子项目(2009CB320805);中央高校基本科研业务费专项资金(2012TD002)
张显库(1968-),男,辽宁沈阳人,教授,博士生导师,研究方向为船舶运动控制、鲁棒控制。E-mail:zhangxk@dlmu.edu.cn.
1000-4653(2014)02-0031-04
U675.9
A
猜你喜欢
舰船科学技术(2022年20期)2022-11-28
水上消防(2022年1期)2022-06-16
海洋开发与管理(2020年2期)2020-09-10
舰船科学技术(2018年7期)2018-07-25
农产品市场周刊(2018年15期)2018-05-16
北京航空航天大学学报(2018年1期)2018-04-20
计算技术与自动化(2016年4期)2017-01-11
北京航空航天大学学报(2016年7期)2016-11-16
舰船科学技术(2016年1期)2016-02-27
火控雷达技术(2016年1期)2016-02-06