简述光刻机投影物镜的几种减振方案
2014-11-29 03:16:30黄静莉
精密制造与自动化 2014年3期
黄静莉
简述光刻机投影物镜的几种减振方案
黄静莉
(上海机床厂有限公司 上海 200093)
振动是影响光刻机投影物镜动态稳定性的关键因素,决定了投影光刻机的主要性能。简述了消除或抑制投影物镜振动的两种方案,即一体式主动减振方案和采用压电陶瓷驱动的柔性支撑两级主动减振方案。通过在实际中应用表明,后一种减振方案可以实现亚微米甚至纳米级的定位精度及稳定性。
光刻机投影物镜压电陶瓷主动减振
在现代工业技术的发展中,高精度的设备越来越多地决定着各行各业的发展前景,特别是在半导体行业。随着大规模集成电路迅速发展的需求,提高集成电路的集成度成为发展的关键。提高集成电路集成度的途径之一是减小集成电路的体积,把每个晶体管元件做小。而微纳米光刻加工设备则是晶体管元件做小的关键,光刻的目的是把要制作的电路结构,包括半导体器件、隔离槽、接触孔、金属互连线等图形以物镜的比例复制到硅片表面的光敏光刻胶上,形成三维图像。
光刻投影曝光微纳米加工设备(即光刻机)是硅片制造的关键设备。其功能是将一整套集成电路永久的刻蚀在涂胶的硅片上,利用光学投影成像原理,通过投影物镜将掩膜版上的集成电路图形正确地光刻复制在硅片上,以做成半导体芯片。为此,光刻机被认为是大规模集成电路制造的核心设备,光刻技术则是集成电路制造工艺发展的动力。
目前,典型的光刻技术包括接触式光刻、接近式光刻、光学投影光刻和激光干涉光刻。其中,光学投影光刻技术是目前IC行业生产中主要采用的光刻工艺。
光刻机是大规模制造集成电路的光学投影光刻工艺中的关键设备,它的性能直接影响着集成电路的特征尺寸。同时,在一套集成电路工艺中,常需要多次光刻,而且每次光刻得到的图形不是相互独立的,而是有着密切的空间关系,这种关系需要用光刻机来保证。投影光刻物镜是投影光刻机的核心部件,决定了投影光刻机的主要性能。投影光刻加工制造必须通过物镜应用光学投影曝光技术,才能实现在硅片上加工电路图像的目的,精度达到微米或纳米量级,最终满足大规模集成电路芯片的高性能需求。为此,物镜的定位精度、动态稳定性能就成为影响光学微纳米加工精度的关键因素,而影响物镜动态稳定性的关键因素是振动。因此,如何消除或抑制物镜振动是至关重要的。
1 投影物镜系统的现有减振方案
光刻机投影物镜安装在内部框架之上,根据物镜曝光的特征线宽指标采取不同的减振方案。比如,当特征线宽在0.5~2 µm,运动平台的定位精度在0.1~0.2 µm,内部框架的残余振动PSD水平限制在10-6(m/s2)2Hz@2~100 H,稳定时间为200~500ms,位置稳定性为1~5 mm时[1],大多采用一体式被动减振方案对支撑物镜的内部框架进行减振,从而达到对物镜系统的振动隔离与抑制,如图 1所示。其缺点是无法对低频振动进行有效地隔离与抑制。采用一体式主动减振方案,即在被动方案的基础上利用速度和加速度传感器进行反馈,作动器主动驱动的减振方案对支撑物镜的内部框架进行减振,稳定时间提高到100~200 ms,位置稳定性提高到20~100 µm。虽然对低频减振有较好的效果,但对于特征线宽在亚微米、纳米级精度,位置稳定性是在几个微米的需求上,仅对支撑物镜的内部框架进行减振已无法满足需求。在微电子技术向大规模、超大规模集成电路方向发展中,随着集成度的不断提高,线条越来越细化,线宽已缩小到90~100 nm左右,对与之相应的工艺设备提出了更高的要求。要求这些设备的定位精度为线宽的1/3~1/5,即亚微米甚至是纳米级精度,通过减振器对内部框架的单级减振已不能满足其性能需求,特别是针对高端光刻机物镜系统及微纳米加工设备的性能要求越来越多的取决于系统定位精度及稳定性。
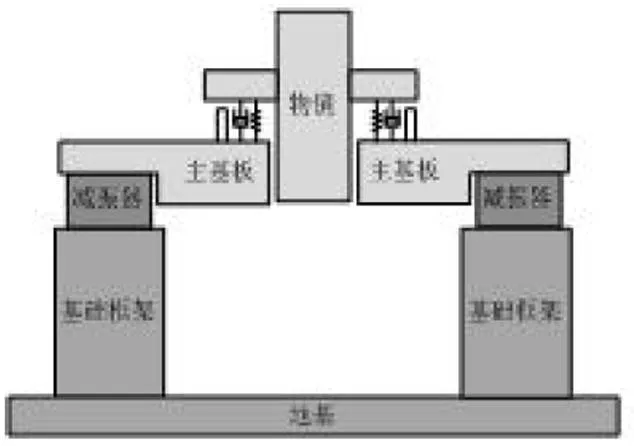
图1 物镜主动阻尼减振
2 投影物镜系统的主动减振方案
针对上述问题提出了采用两级隔振系统方案。第一级采用减振器减振,用于抑制内、外部框架的低频振动;第二级采用柔性支撑—压电驱动阻尼装置,用于隔离主基板上的残余振动加速度,即在物镜与内部框架之间引入阻尼减振模块,直接对物镜系统的振动进行隔离与抑制。
阻尼减振采用柔性支撑—压电驱动技术及主动控制驱动技术。其特点是结构紧凑、体积小、无机械摩擦、无间隙、具有高的位移分辨率、控制简单(只需外加电压),而且容易实现纳米级精度,同时不产生噪音及发热,适用于各种工作环境。通过主动控制技术可消除或抑制水平和垂向振动并实现补偿振动的功能,最终实现对物镜系统的主动减振。柔性支撑—压电驱动的阻尼主动减振采用弹簧与柔性铰链结合的整体式结构,利用叠层式压电陶瓷作为驱动元件。压电陶瓷材料是一种同时兼具正、逆机电耦合特性的智能材料,对压电陶瓷两端面施加外力而变形产生电位差(称为正压电效应)。相反,对两端面施加电场时,产生机械变形(称为逆压电效应)。压电陶瓷分为两部分,一部分利用压电正效应的压电块作为压电传感器,用于测量物镜因振动而作用在柔性块上力的变化;一部分利用压电逆效应作为压电作动器,用于主动施加控制力,补偿因振动而产生的唯一。两部分封装在一起作为一个整体装入两个斜置正交的方孔中,如图2所示。
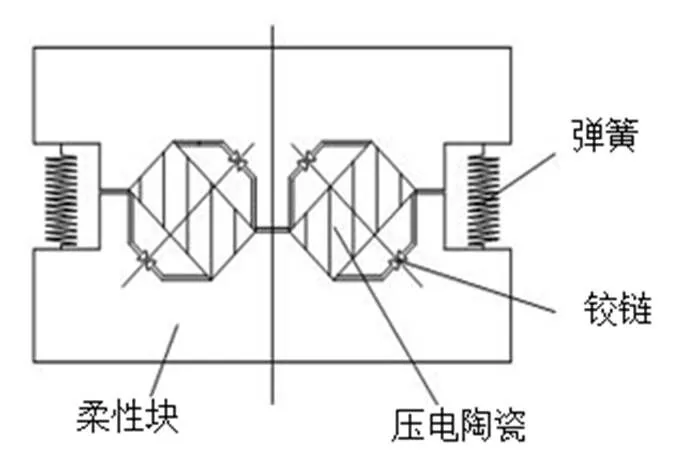
图2 主动阻尼器结构示意图
同时为了减小压电块应力,上、下两面采用粘合剂将压电陶瓷固定在方孔中,预紧弹簧处于垂向拉伸状态,因此,对压电陶瓷施加了一定的预紧力,以防止其受到拉伸力的作用而造成损坏。压电陶瓷的周围设计了细长槽及半圆槽结构作为柔性铰链,以消除由旋转产生剪切应力及弯曲应力对压电块造成的影响。通过斜置正交放置压电陶瓷的方式达到抑制垂向、水平向两个自由度的振动,投影物镜可通过3个阻尼器支撑,因此每个阻尼器上承受的重力为:

通过主动控制作动器,采取重力预紧、弹簧增加预紧的方法达到衰减系统低频振动和抵消扰动力的作用,从而实现物镜系统的制振和隔振功能,使物镜系统在高、低频域范围均能实现较好的减振效果和稳定性。
3 主动阻尼减振方案的控制及效果
物镜安装于整机框架上,框架振动(包含地基振动、工件台运动反力引起的振动等)会传递给物镜,导致物镜系统振动,引起成像的误差,破坏曝光进度。为消除或抑制框架振动对物镜的影响,通过在物镜与框架之间加入柔性支撑—压电驱动的阻尼器实现对物镜系统的主动减振。对运动系统主动施加阻尼力从而抑制投影物镜的振动,并能控制补偿垂向振动位移及水平向振动位移。压电陶瓷块中的压电传感器检测到由振动产生的力后,将测量信号传给控制器,控制器经过一系列控制算法后将控制信号输出给压电作动器以驱动其进行主动抑制振动。控制算法是通过测量振动时力的变化直接对主动阻尼器施加力补偿,这种控制算法实际是一种反馈控制方法,如图3所示。

图3 主动阻尼器控制图
当外界扰动作用在结构上时会产生一个作用力,这个力(sen)可以通过传感器测量获得,把这个力与参考力(ref)相减就会得到一个误差(err),误差(err)通过反馈控制器和扰动信号共同作用在结构体上。如果力传感器测量的值比扰动信号单独作用时小,就表明反馈控制起到了抑制振动的作用。
当作用力为一定值时,由刚度模型可知:
act()=perr() (2)
式(2)中,p为刚度的倒数,力err与位移act成正比。当作用力随时间变化时,其关系式为:
act()=il∫err() (3)
将式(2)、(3)相加得到:
act()=perr()+il∫err() (4)
对式(4)进行求导,得出

将式(5)的两边进行拉氏变换,得

式(6)就是反馈控制器中经过一系列控制算法要实现的目标。通过仿真计算,这种积分力反馈控制算法可以降低物镜共振峰值约20 db,如图4、图5、图6所示。
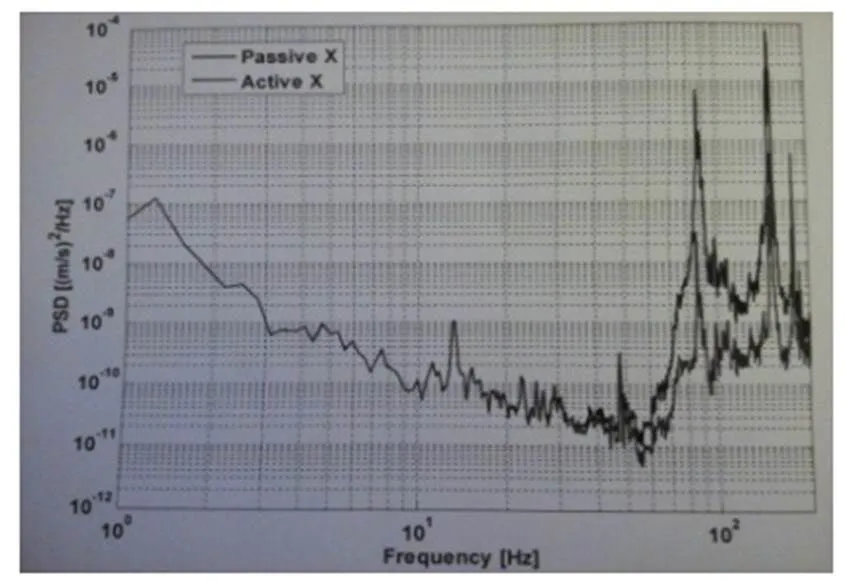
图4 积分力反馈控制算法效果图(X向)

图5 积分力反馈控制算法效果图(Y向)
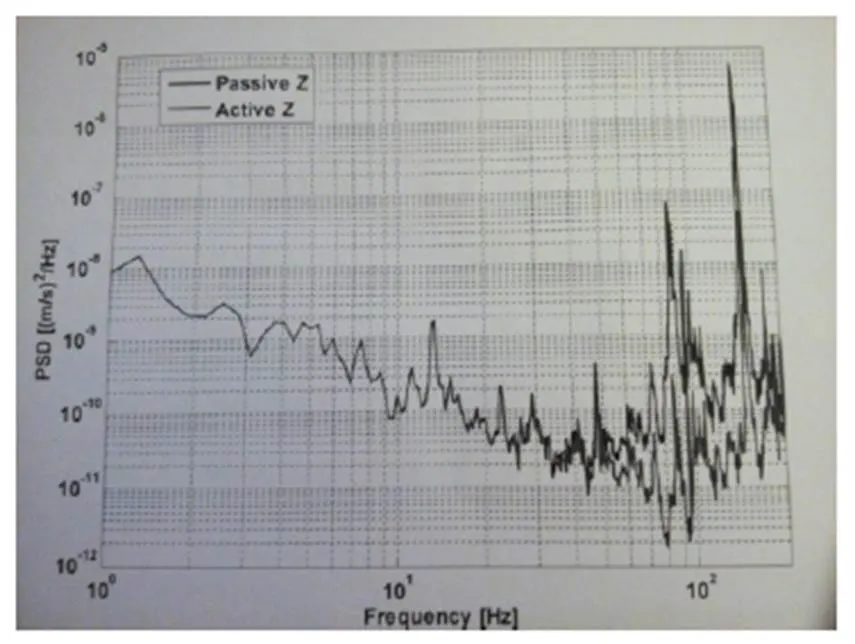
图6 积分力反馈控制算法效果图(向)
3 结语
随着光刻机技术的逐渐成熟,投影物镜的动态稳定性也成为了热门的话题。从试验数据中可以看出,主动阻尼减震方案在定位精度及稳定性上都有较好的实现效果,也更适合实际的应用开发。
[1] 袁志扬. 主动减震系统技术在纳米加工设备上的应用及发展[J].精密制造与自动化,2012(3): 9-12.
猜你喜欢
中国经济周刊(2023年23期)2024-01-08 05:43:43
中国经济周刊(2023年23期)2023-12-31 08:01:10
科普童话·学霸日记(2021年11期)2021-05-30 10:48:04
中国电子报(2020年56期)2020-09-13 22:47:25
科学家(2017年20期)2017-11-10 13:05:44
光学精密工程(2016年4期)2016-11-07 09:04:52
光学精密工程(2016年3期)2016-11-07 09:04:21
光学精密工程(2016年3期)2016-11-07 09:04:17
电子工业专用设备(2015年4期)2015-05-26 09:10:35
淮南师范学院学报(2015年3期)2015-03-22 01:16:17