
反舰导弹对编队目标最佳瞄准点的确定方法❋
2014-11-28 09:38徐志强
舰船电子工程 2014年8期
徐志强 朱 会
(91550部队 大连 116023)
1 引言
舰艇编队作战是现代水面舰艇作战的主要模式,打击编队目标已成为反舰导弹作战使用的主要任务,为了提高其整体目标的作战效能,采用目标选择性攻击是反舰导弹作战的必要环节,而利用目标间拓扑关系匹配的选择方法又对反舰导弹大概率捕捉编队整体目标提出更高要求[1],同时,在反舰导弹集群作战模式中,指挥弹对编队目标的整体捕捉特性及使用决策的研究也具有重要意义。目前研究较多的对单目标的捕捉模型及特性分析显然不能满足上述作战使用需求。据此,本文研究的问题可归为:在编队队形结构及目标散布、导弹自控终点散布和末制导雷达捕捉技术性能等约束条件下,如何确定导弹自导开机时刻的瞄准点位置和攻击航向达成以最短的雷达开机时间获得全捕目标的概率最大。首先对上述约束建立条件及决策模型,通过仿真统计分析对编队目标捕捉概率的影响因素,进而得出最优的导弹攻击使用策略。
2 编队队形的描述模型
本文研究的典型目标编队队形有梯形、“人”字形和菱形,如图1所示。对于其他队形形式研究方法相似。编队结构参数可简化为队列间距L和队列夹角θt描述。基本配置为队列间距20~35链,队列夹角30°~60°。坐标系建立,以“人”字形编队为例,瞄准点坐标系如图2所示,以首舰T1航向为纵轴Z方向,以目标舰T2和T3连线中点为原点O,过原点与纵轴垂直方向为横轴,由对称性可知横轴与T2和T3共线。假设瞄准点设为A点,导弹末制导雷达开机点M,两点间距为自导开机距离Rzd,攻击航向角为ωd,采用其他坐标系通过换算即可。

图1 典型目标编队队形

图2 “人”字形编队的导弹瞄准点坐标系
其中T1、T2和T3的位置坐标:

3 末制导主动雷达搜索模型
反舰导弹捕捉概率是指导引头开机后能够捕捉到目标的可能性,即目标落入雷达捕捉带内并被雷达捕捉到的概率。现代导弹导引头通常只要搜索区覆盖到目标,就能够检测到目标。因此,捕捉概率就等于导弹搜索区覆盖目标的概率。由于反舰导弹的导引头多为单平面雷达,其俯仰覆盖概率和距离捕捉概率可近似为1,捕捉概率就近似等于导弹方位搜索区覆盖目标的概率[2]。
如图3所示,设雷达扫描半宽角α,扫描周期T,雷达天线转动角速度ωl,近界和远界分别为rmin和rmax,方向为自右向左初始方位角α0。导弹速度为vd,一个周期完成的扫描区域如图4,在Δt时间间隔雷达扫描区域如图5。雷达远近界t时刻轨迹曲线:

r=rmin或rmax,α0:天线轴初始方位角。
在采样时间Δt内,雷达覆盖区域可用四边形ABCD近似,A和B两点坐标C和D两点坐标:

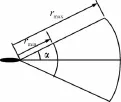
图3 雷达基本参数示意图
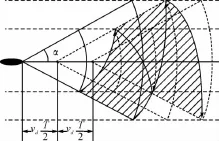
图4 雷达1T扫描范围(阴影)

图5 雷达在Δt时刻扫描的范围(阴影)
4 导弹自控终点散布模型
反舰导弹自控终点误差与自控段制导方式有关,反舰导弹可采用卫星定位系统、捷联式惯导系统或自动驾驶仪进行中段制导。卫星导航系统的误差通常在100m以内,对于导弹的搜捕影响很小,这里忽略不计。
对于采用惯导系统的导弹,主要考虑对自控终点误差影响比较大的惯导系统误差(其他误差的影响结果,可以通过改变惯导系统误差的大小对自控终点误差产生的影响来代替),惯导误差主要考虑积累误差引起的导航误差,实际自控终点的散布可以描述为正态分布:


5 编队目标散布模型
随着射程的增大,反舰导弹逐步趋向于采用现在点射击[3,8]。采用现在点射击方式的反舰导弹,依赖目标指示,计算射击诸元时,不计算导弹自控飞行时间内目标的运动,目标方位误差主要包括目标初始指示误差和目标在导弹自控飞行时间内机动产生的误差[4]。

图6 编队目标最大机动范围边界曲线
目标初始指示散布范围位于以r为半径的圆内,各方向上分布服从 N(0,σ2r)的正态分布。对于导弹自控飞行时间内目标机动散布,假设编队队形作刚体运动,即目标间几何关系保持不变,各舰机动速度假设相同,由图6可知,首舰在B方向上的最大机动范围即为一次转向后该方向上的最大极径,因此,编队的最大机动范围边界就是首舰各方向的最大极径轨迹,编队目标该区域内可看作为均匀分布。设转向角速度为ωj,则边界近似曲线极坐标方程:

因此,目标位置在导引头开机搜索时的散布范围,应是目标指示精度误差位置范围与机动范围的叠加。
6 仿真结论及分析
仿真试验约束条件设置如下:目标编队为“人”字形编队,队列间距L=20链,队列夹角θt=60°,目标舰艇的平均机动速度为vt=10m/s,目标舰旋回角速度ωj=1.5°/s,导弹的平均飞行速度为vd=300m/s,末制导达距离波门rmin=10km,rmax=40km,搜索扇面半宽α=±30°,周期T=2s,自导开机装订距离为rzd=30km,天线以弹横轴自右向左扫描,目标指示精度σr=10km,试验时间步长Δt=0.1s,开机时刻航向角采样间隔ΔB=30°,自导距离采样步长ΔR=1km,如图7所示,每个网格点代表一个瞄准点,序号如图顺序排列,每攻击航向试验样本1000次。仿真结果均为雷达扫描1T内的全捕捉概率。
试验一:假设在导弹自控飞行时间tzk即编队机动时间一定的情况下,计算不同瞄准点不同攻击航向的捕捉概率,设tzk=30min,仿真结果如图8所示。
试验二:在tzk一定的情况下,以不同目标舰现在点为瞄准点与最优瞄准点不同攻击航向上的捕捉概率对比如图9所示。

图7 仿真试验瞄准点采样位置及攻击航向设置

图8 试验一的仿真结果

图9 试验二的仿真结果
试验三:不同队列间距下最优瞄准点不同攻击航向上的捕捉概率对比如图10所示。

图10 试验三的仿真结果
由试验一仿真结果可知,最优瞄准点的位置位于编队三角形中心点附近,攻击航向90°时获得的全捕概率到达最大值约0.96,并且随着远离中心点的距离增大而减小;由试验二可知,以编队中的目标舰为现在点为瞄准点的全捕概率均小于最优瞄准点的概率,而以目标2和目标3为瞄准点的捕捉概率呈现略微差异,其原因与雷达天线轴相对于瞄准点扫描方向有关;通过设置不同队列间距,由试验三可以看出,随着间距增大,由于导致目标的机动范围增大而使捕捉概率整体减小,同时结果表明,以目标舰为瞄准点与最优瞄准点的捕捉概率差距也会明显增加。
7 结语
本文在分析典型目标编队队形结构和其机动以及导弹自控终点散布的基础上,结合末制导雷达搜索模型,通过试验仿真的方法确定给定约束条件下的最佳目标及攻击航向,试验结果表明,对于攻击编队目标,不同队形以及不同队列参数取得的最佳目标会略有不同。大间距编队由于机动范围的扩大对全捕概率的影响较大。
[1]童丽,等.基于目标功能毁伤的瞄准点选取方法[J].弹箭与制导学报,2010,30(1):130-134.
[2]来庆福,等.反舰导弹雷达导引头最佳开机距离影响因素分析[J].战术导弹技术,2011(5):90-95.
[3]陈钰宁,曾家有.采用现在点射击方式的反舰导弹捕捉概率计算模型[J].海军航空工程学院学报,2010(3):208-210.
[4]王光辉,等.超视距反舰导弹命中概率分析[J].弹箭与制导学报,2008,28(2):33-38.
[5]杨俊峰,等.陀螺随机游走对导弹自瞄准精度的影响[J].航天控制,2012,30(5):21-24.
[6]赵晶,等.反舰导弹攻防对抗仿真系统[J].系统仿真学报,2012,24(10):2108-2112.
[7]叶利民,等.反舰导弹主从式协同攻击样式[J].火力与指挥控制,2012,37(9):92-94.
[8]程恭,等.基于瞄准点排布模型的多发同时弹着射击诸元解算[J].舰船电子工程.2011,31(11):29-32.
[9]吴正龙,王大鹏.基于仿真弹群的目标毁伤预测模型[J].火力与指挥控制,2012,37(9):67-70.
[10]杨晓凌,等.传感器/武器—目标分配问题的两种规划模型及求解[J].火力与指挥控制,2012,37(9):18-22.
猜你喜欢
化工管理(2022年14期)2022-12-02
舰船科学技术(2022年10期)2022-06-17
建材发展导向(2021年11期)2021-07-28
新世纪智能(高一语文)(2021年3期)2021-07-16
数字海洋与水下攻防(2020年5期)2021-01-04
学生天地(2020年8期)2020-08-25
民用飞机设计与研究(2019年4期)2019-05-21
兵器知识(2017年10期)2017-10-19
电子制作(2017年24期)2017-02-02
海军航空大学学报(2015年1期)2015-11-11
