
沿岸通航密集区航行风险识别、评估和控制
2014-11-28 11:24:19栾法敏
中国航海 2014年3期
栾法敏
(青岛远洋船员职业学院,山东 青岛 266071)
沿岸通航密集区航行风险识别、评估和控制
栾法敏
(青岛远洋船员职业学院,山东 青岛 266071)
为保证船舶在沿岸通航密集区安全航行,需对航行风险进行识别、评估和控制。结合多年航海实践,对航行风险进行识别;利用模糊评价的相关理论,建立风险评估的数学模型,对引发航行风险的因素进行综合评估,确定风险等级和引发风险的最主要因素。在风险识别和评估的基础上,采取针对性措施,以有效控制风险、确保安全。经实例验证,该方法对保障船舶航行安全具有一定的指导意义。
水路运输;沿岸通航密集区;风险识别;评估和控制
沿岸通航密集区的海事事故发生率较高[1],船舶在该区域航行存在较大风险。为保证船舶在沿岸通航密集区安全航行,需对引发航行风险的诸多因素进行科学合理的综合评估;针对评估结果,采取合理有效的防范措施,使航行风险得到降低或控制。[2]结合多年工作以及对船长进行适任评估的经验,总结一种可对沿岸通航密集区航行风险进行识别、评估和控制的方法,期望对降低和控制船舶在沿岸通航密集区的航行风险起到一定的指导作用。
1 沿岸通航密集区特点
根据中国海事局组织编写的教材《航海学》[3],沿岸通航密集区主要有以下特点:
1. 航线离岸近,附近航行危险物、障碍物较多,水深有时较浅。
2. 沿岸海区水流复杂,受潮流影响较大。
3. 来往船只和各类渔船比较密集,航行和避让都有较大困难。
4. 船舶回旋余地较小,遇到紧迫局面时,船舶操纵困难。
5. 可供定位与导航的物标较多,船位的确定比较容易。
6. 海区内海图、航路指南和潮汐表等航海资料比较完备,有利于驾驶员全面、深入了解所经海区内的水文气象、助航设施、航海危险物、推荐航线和航法等信息。
7. 沿岸许多拥挤水道都实行了分道通航制,旨在简化船舶汇集水域内交通流的形式,分割相反的交通流,尽可能地降低船舶间的避碰危险。
2 风险识别
根据沿岸通航密集区的特点,分析船舶在沿岸通航密集区航行时容易造成的风险:
1. 离岸近、障碍物多、水深较浅等给船舶带来的潜在风险是容易造成搁浅。
2. 水流复杂、潮流影响大会对船舶的操纵带来困难,存在偏离航线的风险。
3. 渔船密集会给船舶的避让带来困难,存在触碰渔船的风险。
4. 回旋余地小会给船舶的操纵和避让带来困难,存在触碰交会船、周围浮标或养殖区的风险。
5. 物标较多对陆标定位有帮助,但太多的话容易产生误识物标的风险。
通过分析不难发现,在沿岸通航密集区航行主要存在误识物标、偏航、触碰浮标、触碰养殖区、搁浅触礁、触碰渔船、触碰货船等风险。
3 风险评估
3.1评估指标确立
将上述主要风险作为风险评估一级指标,将引起这些风险的因素作为风险评估的二级指标(见表1)。

表1 评估指标
3.2建立因素集和评价集
3.2.1因素集
因素集U为影响判断对象的各个因素组成的集合,即U={u1,u2,u3,…,un},其中ui(i=1,2,3,…,n)为影响因素。根据确定的评估指标,得到因素集为U={u1,u2,u3,u4,u5,u6,u7},其中u1,u2,u3,u4,u5,u6,u7分别为误识物标、偏航、触碰浮标、触碰养殖区、搁浅触礁、触碰渔船、触碰货船。
3.2.2评价集
评价集v={v1,v2,v3,v4,v5}={-2,-1,0,1,2},其中vj(i=1,2,3,…,n)为评价因素,用-2,-1,0,1,2作为评价模糊数进行模糊计算。其中,-2表示危险程度最小,-1表示危险程度较小,0表示危险程度一般,1表示危险程度较大,2表示危险程度最大。
3.3确定各指标隶属度
确定隶属度的方法有模糊统计法、例证法、专家经验法、二元对比排序法等[5-7],此处在专家经验的基础上采用模糊统计法确定各个指标的隶属度,即
(1)
式(1)中:rij为ui相对于vj的隶属度。
隶属度的确定是风险评估中的基石,如在求取评估指标“搁浅触礁”的隶属度时,应先分别求取二级评估指标“离孤立危险物距离”和“计划航线附近水深”的隶属度,二者的平均值就是评估指标“搁浅触礁”的隶属度。譬如,某航区离计划航线0.5 n mile附近有1个孤立危险物,0.7 n mile处有1个,1.2 n mile附近有1个,1.5 n mile附近有2个,根据孤立危险物的距离和数量填写表2,并做归一化处理,算出二级指标“离孤立危险物距离”的隶属度;同样,根据一定标准求出“计划航线附近水深”的隶属度(见表3);二者的平均值即为“搁浅触礁”的隶属度(见表4)。根据实际航次通过不同的通航密集区同样可完成其他6个评估指标隶属度的计算。
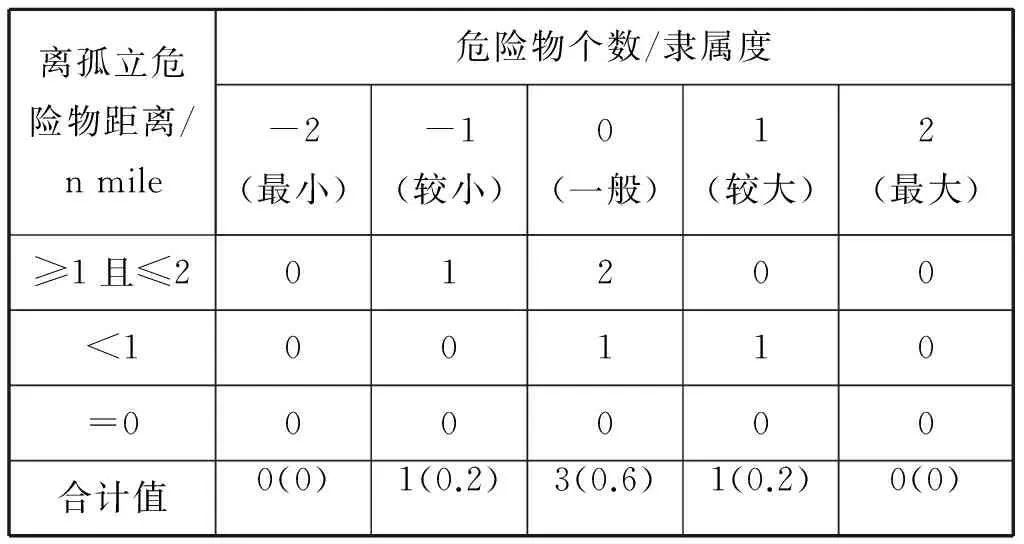
表2 与孤立危险物距离隶属度的举例

表3 计划航线附近水深隶属度的举例

表4 搁浅触礁隶属度的举例
3.4权重确定
上述因素集中的7个评估指标对总的风险程度的影响是不一样的,需要从数值上进行量化,确定各个指标的权重。权重的确定方法有很多种,主要有层次分析法、直接定权法、环比构权法和频数统计法。此处采用层次分析法,通过走访山东海事局船舶交通管理系统(Vessel Traffic Services,VTS)的资深船长,得出表5的评估指标比较判断矩阵。

表6 平均随机一致性指标RI

通过对判断矩阵的一致性检验,其所对应的特征向量为
W=(W1,W2,…,W7)T=(0.047 5,0.060 7,
0.099 0,0.192 0,0.291 8,0.474 8,0.798 0)T
经过归一化处理后,各个指标的相对权重分别为
W=(W1,W2,…,W7)T=(0.024 2,0.031,0.050 4,
0.097 8,0.148 6,0.241 7,0.406 3)T
即评估指标误识物标、偏航、触碰浮标、触碰养殖区、搁浅触礁、触碰渔船、触碰货船的相对权重分别为2.42%,3.1%,5.04%,9.78%,14.86%,24.17%,40.63%。
3.5评价过程
3.5.1风险级别评估取权重向量
W=(W1,W2,…,W7)T=(0.024 2,0.031,0.050 4,0.097 8,0.148 6,0.241 7,0.406 3)T,B=W·R是对风险级别的评估,这里是一种模糊关系合成,也称为模糊变换。得到评价向量B后再利用最大隶属法则进行反模糊化,得到对风险级别的评估。
3.5.2求取引发风险的最主要因素
在对危险程度进行评估的基础上,根据每个风险评价指标的权重、隶属度和评级模糊数求取加权模糊指数D=W·R·V,加权模糊指数大者为引起航行风险的最主要因素。
4 风险控制
船长可根据本船本航次的实际情况,针对风险评估的等级和引发航行风险的最主要因素采取应对措施,将船舶在沿岸通航密集区的航行风险降到最低,确保船舶安全航行。
5 实例验证
某船从天津开往青岛,根据该航次的计划航线,对青岛港附近的通航密集区进行风险识别、评估和控制。结合该航区的特点,首先对航行中可能遇到的风险因素进行识别;然后根据识别的风险因素进行风险评估,得到航经该区域的风险等级和造成风险的主要因素和次要因素;最后根据评估结果,进一步采取预防和控制风险的措施,将风险降到最低。
5.1风险识别
根据青岛港附近实际情况,进行航行风险评估。
1) 穿过小公岛附近的报告线后,航区周围物标众多,有误识物标的风险。
2) 在团岛嘴附近,因水流较大,有偏航的风险。
3) 驶过青岛港1号浮后,航区周围浮标较多,有触碰浮标的风险。
4) 在9号浮附近有养殖区,离航道较近,航经此处有偏航触碰养殖区的风险。
5) 马蹄礁附近水深较浅,航经此处有触礁和搁浅的风险。
6) 经常有小渔船穿插航道,有触碰渔船的风险。
7) 青岛港进出货船较多,航经该区域有触碰其他货船的风险。
5.2风险评估
根据模糊评价法,对青岛港附近沿岸通航密集区的航行风险进行综合评估。
5.2.1隶属度
根据航行安全评价标准,对风险评价指标进行隶属度的确定和统计(见表7)。

表7 隶属度统计结果
构建隶属度矩阵:

权重向量依据于判断矩阵得出的结果为
W=(W1,W2,…,W7)T=(0.024 2,0.031 0,0.050 4,0.097 8,0.148 6,0.241 7,0.406 3)T
5.2.2模糊评价法风险评估
计算评价向量
B=W·R=[0.048 72,0.214 09,
0.362 38,0.249 60,0.125 21]
根据最大隶属度原则,对本航次航经青岛港附近通航密集区的风险评价是危险程度一般。
5.2.3确定最主要的风险因素
通过求取每个风险指标的模糊指数,比较确定引发风险的最主要因素。
(1) 误识物标的模糊指数为
B1=0.024 2[0.2×(-2)+0.25×(-1)+
0.25×0+0.2×1+0.1×2]=-0.006 1
(2) 偏航的模糊指数为
B2=0.031[0.0×(-2)+0.2×(-1)+
0.45×0+0.25×1+0.1×2]=0.007 8
(3) 触碰浮标的模糊指数为
B3=0.050 4[0.1×(-2)+0.2×(-1)+
0.25×0+0.35×1+0.1×2]=0.007 6
(4) 触碰养殖区的模糊指数为
B4=0.097 8[0.15×(-2)+0.2×(-1)+
0.35×0+0.15×1+0.15×2]=-0.004 9
(5) 搁浅触礁的模糊指数为
B5=0.148 6[0.0×(-2)+0.15×(-1)+
0.30×0+0.45×1+0.1×2]=0.074 3
(6) 触碰渔船的模糊指数为
B6=0.241 7[0.1×(-2)+0.2×(-1)+
0.45×0+0.15×1+0.1×2]=-0.012 1
(7) 触碰货船的模糊指数为
B7=0.406 3[0.0×(-2)+0.25×(-1)+
0.35×0+0.25×1+0.15×2]=0.121 9
由计算结果可以看出,触碰货船的模糊指数最大,即本航次航经青岛港附近沿岸通航密集区时引发航行风险的最主要因素是船舶碰撞。以往的事故统计表明,在青岛港附近航行,船舶碰撞出现的概率远大于其他事故,说明评估结果与实际是吻合的。
5.2.4控制风险的措施
虽然航行风险的评估等级为一般,但是船长需对引发航行风险的最主要因素“船舶碰撞”引起重视;应采取多安排值班人员进行瞭望、开启雷达、备车航行、采用安全航速等一切有效措施来避让船舶[10],将风险降到最低。
6 结 语
对沿岸通航密集区船舶的风险进行识别、评估和控制是一项抽象和较难量化的工作,通常做法是依靠船长的主观判断,有一定的局限性和片面性。本文借助模糊评价法对沿岸通航密集区的风险进行细分和量化,从而评估出风险等级并确认最主要的风险因素,进一步根据评估结果采取针对性措施,降低或控制航行风险,确保船舶安全。该方法可对船长和驾驶员有效控制航行风险起到一定的指导作用。
[1] 中国海事局. 典型案例调查解析 [M]. 大连: 大连海事大学出版社,2004.
[2] 胡甚平,方泉根,乔归民,等.大型船舶航行的风险分析与风险控制 [J].中国航海,2006(3):34-38.
[3] 中国海事局.航海学 [M].大连:大连海事大学出版社,2012.
[4] IMO.航次计划指南(Guidelines for Voyage Planning)A. 893 (21)号决议[K]. 1999.
[5] 蒋泽军.模糊数学教程[M].北京:国防工业出版社,2004.
[6] 罗云, 樊运晓, 马晓春. 风险分析与安全评价[M]. 北京: 化学工业出版社, 2004.
[7] 向阳, 朱永峨, 陈国权, 等. 风险分析与综合安全评估(FSA)[J]. 中国船检,1999(1): 34-35.
[8] 吴兆麟.船舶碰撞与海上安全研究 [M].大连: 大连海事大学出版社,2006.
[9] 司玉琢,胡正良,傅廷中,等.新编海商法学[M].大连:大连海事大学出版社,1999.
[10] 陈伟炯.船舶安全与管理 [M].大连:大连海事出版社,1998.
Identification,AssessmentandControlofNavigationalRisksinCoastalandCongestedWaters
LUANFamin
(Qingdao Ocean Shipping Mariners College, Qingdao 266071, China)
In order to ensure navigation safety of ships in coastal and congested waters, it is necessary to identify and assess navigation risks, and control or weaken them. With the experience of navigation at sea, an evaluation index system and the risk evaluation model are established by fuzzy comprehensive evaluation theory. The degrees of risks are assessed, and the influencing factors of major risks are determined. The countermeasures are suggested. Actual applications prove that the proposed model is effective in improving navigational safety.
waterway transportation; coastal and congested navigational waters; risk identification; assessment and control
2014-04-30
栾法敏(1969—),男,山东高密人,副教授,船长,主要从事航海技术研究和航海技术教学。E-mail: 13953270761@163.com
1000-4653(2014)03-0080-05
U676.1
A
猜你喜欢
船舶(2021年4期)2021-09-07 17:32:22
疯狂英语·新读写(2021年6期)2021-08-05 07:49:10
小哥白尼(趣味科学)(2019年10期)2020-01-18 09:16:22
船舶标准化工程师(2019年4期)2019-07-24 07:21:12
中学生英语(2017年6期)2017-07-31 21:28:55
报刊荟萃(上)(2017年4期)2017-06-14 16:47:53
证券市场周刊(2017年14期)2017-05-23 19:05:57
中国船检(2017年3期)2017-05-18 11:33:09
青年歌声(2017年6期)2017-03-13 00:57:56
环球时报(2012-01-16)2012-01-16 10:13:04
