射波刀同步追踪方式对头脚及左右运动肿瘤治疗的误差分析
2014-11-23 01:11曹洋森于春山刘永明
医疗卫生装备 2014年5期
曹洋森,于春山,刘永明
0 引言
射波刀(Cyber Knife)是全球第一套以无创非侵入方式治疗全身肿瘤的机器人立体定向放射外科系统。1999年,美国食品和药品管理局(FDA)批准射波刀用于头颈部及脊柱上部肿瘤的治疗;2001年,美国FDA批准其用于治疗身体任何部位的肿瘤。截至2010年,全球已经超过20个国家安装了206台射波刀[1],至2012年12月全球安装已超过270台。射波刀是将一台光子能量6MV的小型直线加速器安装在一个拥有6个自由度的机器人手臂上,利用先进的实时影像引导系统以及同步追踪系统对患者进行自动摆位及跟踪治疗[2],是唯一精准度在1mm以下、不需要钉子固定头架而能治疗颅内与全身肿瘤的放射外科设备[3]。由此,做好射波刀的QA与QC,保证其治疗精度是开展射波刀临床治疗的重点工作。
射波刀在临床治疗中的追踪方式共有5种,分别是六维颅骨追踪(6D Skull)、脊柱追踪(XSight Spine)、肺部追踪(XSight Lung)、金标追踪(Fiducials)和同步呼吸追踪(Synchrony)。对于跟随呼吸运动且不符合XSight Lung追踪标准的肿瘤一般采用植入金标的Synchrony追踪方式。AAPM及Accuray公司给出的质量控制端到端测试(E2E,end-toend)方案只验证了射波刀对于头脚方向(I/S)运动肿瘤的追踪治疗精度[4],正常患者体内肿瘤的运动方式一般是复杂的多维运动,不会局限于单一头脚方向。笔者认为验证射波刀对左右方向(L/R)运动肿瘤的追踪治疗精度同样具有重要意义。
1 材料与方法
1.1 材料
射波刀,美国 Accuray公司,第四代(G4);大孔径 CT,荷兰 Philips,Brilliance Big Bore;Synchrony 模体,美国 Accuray公司,Synchrony Motion Table;免冲洗胶片,美国Hayes Manufacturing Service公司,Box Film Ball CubeⅡEBT2;胶片扫描仪,日本EPSON公司,EXPRESSION 10000XL;端到端测试软件,End-to-End(E2E)Film Analysis,美国 Accuray公司,version 4.0。
1.2 方法
1.2.1 获取Synchrony模体CT影像并制定E2E验证计划
调整Synchrony模体运动开关,将球方置于运动中心零点。飞利浦大孔径CT模拟定位机下扫描条件为120 kVp、400mAs、1.5mm层厚对模体进行轴扫。将影像数据传输至射波刀数据管理系统(CyberKnife data management system,CDMS),依照 Ac curay公司物理学基础指南(physics essentialsguide)制定E2E计划。
1.2.2 Synchrony模体头脚方向运动时E2E误差分析
将Synchrony模体置于射波刀治疗床,调用E2E验证计划,曝光条件 110 kVp、100mA、50ms,使六维方向摆位误差均≤0.2mm/0.2°。打开运动开关,建立模体呼吸模型,执行E2E计划。照射完成后对胶片进行分析,获得三维方向运动总体误差(totalerror)。重复该试验5次。
1.2.3 Synchrony模体左右方向运动时E2E误差分析
将Synchrony模体运动平台顺时针旋转90°,保持球方位置不变,调用E2E验证计划,曝光条件:球管A—110kVp、100mA、50ms,球管 B—150kVp、200mA、50ms,使六维方向摆位误差均≤0.2mm/0.2°。打开运动开关,建立模体呼吸模型,执行E2E计划,对胶片进行分析,获得总体误差。重复该试验5次。
2 结果
2.1 Synchrony模体头脚方向运动时E2E误差分析
Synchrony模体处于头脚方向运动时,其E2E误差分析获得5组数据,结果见表1。均值0.358mm,标准差0.124mm,经单侧单样本t检验,检验水准0.05,所得t=-20.60,P<0.000 1。Synchrony模体头脚方向运动时E2E误差小于1.500mm。
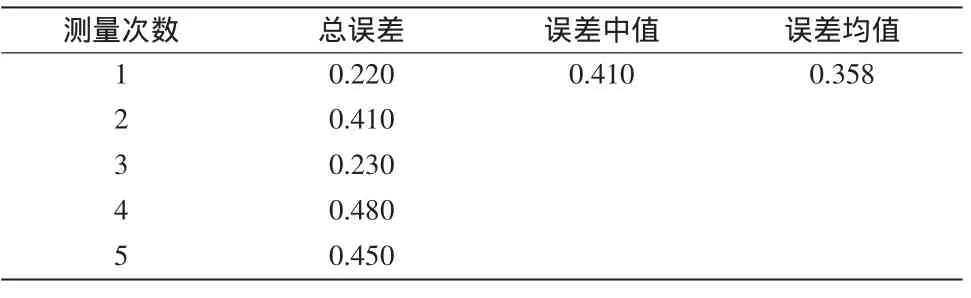
表1 Synchrony模体头脚方向运动时E2E误差分析mm
2.2 Synchrony模体左右方向运动时E2E误差分析
Synchrony模体处于左右方向运动时,其E2E误差分析获得5组数据,结果见表2。均值0.720mm,标准差0.082 mm,经单侧单样本t检验,检验水准0.05,所得t=-21.23,P<0.000 1。Synchrony模体头脚方向运动时E2E误差小于1.500mm。

表2 Synchrony模体左右方向运动时E2E误差分析mm
3 讨论
验证射波刀的同步追踪系统的准确性,做好其质量保障对于开展射波刀SBRT临床治疗具有重要的指导意义。AAPM TG 135报告中制定的E2E月检QA要求验证5种追踪方式各自端到端治疗误差,一般医院物理师均是依据其标准及流程进行QA的月检工作[5-6]。
在5种追踪方式中,Synchrony主要应用于胸腹部随呼吸运动的肿瘤治疗,是一种动态追踪治疗,也是射波刀最先进的子系统之一[7],使体部立体定向放射治疗的精准度大大提升。Accuray对于Synchrony追踪方式的E2E验证仅分析了射波刀对于头脚方向(I/S)运动肿瘤的追踪治疗精度,正常患者体内肿瘤的运动方式不会局限于单一方向,经常存在多个方向(I/S、L/R、A/P)共同运动的肿瘤[8]。笔者认为,仅验证I/S方向运动肿瘤的追踪治疗精度不能完全验证射波刀对多维运动肿瘤的同步追踪功能。鉴于Synchrony验证模体只能实现单一方向的运动,笔者将Synchrony运动平台顺时针旋转90°,用以验证射波刀在L/R方向的追踪治疗精度。
在实现Synchrony验证的过程中,因运动平台内部含有金属部件,需要使用5 cm的聚苯乙烯泡沫塑料来抬高球方,以减少金属部件对金标影像的干扰。但在进行L/R运动方向验证时,因球方的运动方向使平台与X线球管的摄片方向重叠,使B图像中部分金标与平台的金属部件重合,无法获得清晰独立的金标影像。最终调整B球管(Camera B)的曝光参数为150kVp、200mA、50ms后仅可获得清晰金标3粒,勉强获得球方内部包含旋转参量的六维结构进行追踪治疗[9]。由于与I/S方向追踪相比减少了3粒金标,董洋等人研究表明,平均参量误差增加0.141mm,旋转参量增加0.019°[10],这也正是最终得到L/R运动方向的E2E总误差均值比I/S方向增加0.362 0mm的原因。
[1] 周元明.射波刀在国内外分布及治疗疾病概况[J].中国中医药咨讯,2010,33(2):38.
[2] Hoogeman M,Prevost JB,Nuyttens J,etal.Clinical accuracy of the respiratory tumour tracking system of the Cyberknife:Assessment by analysis of log files[J].Int JRadiat Oncol Biol Phys,2009,74:297-303.
[3] 曹洋森,于春山,刘永明.利用模拟定位机验证射波刀影像同步追踪系统的准确性研究[J].科学技术与工程,2013,13(6):1 578-1 580.
[4] Sonja D,Carlo C,Cynthia FC,etal.Reportof AAPM TG 135:Quality assurance for robotic radiosurgery[J].Medical Physics,2011,38(6) :2 914-2 936.
[5] 李玉,徐慧军,张素静,等.G4射波刀照射精度的验证与评价[J].中国现代医生,2012,50(15):112-115.
[6] 徐慧军,李玉,张素静.探讨建立G4射波刀系统的验收测试程序[J].医疗卫生装备,2012,33(10):355-362.
[7] 王涛,李兵,王京陵,等.射波刀同步动态呼吸追踪系统[J].实用医技杂志,2012,19(1):80-81.
[8] Wouter Wunderink,Alejandra Mendez Romero,Willy de Kruijf,etal.Reuduction of respiratory liver tumour motion by abdominal compression in stereotactic body frame,analyzed by tracking fiducial markers implanted in liver[J].Int JRadiat Oncol Biol Phys,2008,71:907-915.
[9] 徐慧军,李玉,张素静,等.射波刀治疗中患者拍摄的千伏级影像数量统计及受到的剂量评估[J].中国现代医药杂志,2013,15(1):4-6.
[10] 董洋,李丰彤,王境生,等.置入软组织金标数目对射波刀系统影像定位精度影响[J].中华放射肿瘤学杂志,2010,19(5):465-467.
猜你喜欢
橡塑技术与装备(2022年3期)2022-03-17
计算机应用(2022年2期)2022-03-01
计算机应用(2021年4期)2021-04-20
计算机应用(2021年1期)2021-01-21
智能计算机与应用(2019年1期)2019-01-11
自动化学报(2016年5期)2016-04-16
小天使·一年级语数英综合(2015年2期)2015-01-14
医疗卫生装备(2014年11期)2014-03-17
云南畜牧兽医(2014年2期)2014-02-28
天津师范大学学报(自然科学版)(2014年4期)2014-02-18