半潜式平台用锚机研究
2014-11-22 02:11:24李鹏王定亚肖锐牟新明何进前
机械工程师 2014年3期
李鹏,王定亚,肖锐,牟新明,何进前
(1.宝鸡石油机械有限责任公司,陕西 宝鸡 721000;2.国家油气钻井装备工程技术中心,陕西 宝鸡 721000)
0 引言
随着陆地油气资源的日趋枯竭,人类加快了对海洋油气资源开发的步伐。目前,半潜式平台作为海洋油气资源开发的主要工具,发展日趋完善,现有作业平台已发展到第六代。随着我国首座自主设计、建造的第六代深水半潜式平台“海洋石油981”投入使用,“海洋石油982”建造也已被提到日程,国内已掀起海洋深水勘探开发新的热潮。锚机作为半潜式平台配套的关键设备之一,是确保平台准确定位、拖移等作业必不可少的设备。因此,着重研究和开发海洋平台用锚机就显得尤为必要。
1 平台定位模式分析
半潜式平台的定位方式主要有3 种:锚泊定位、动力定位以及锚泊辅助动力定位[1-2]。当平台在水深小于1500m 的水域作业时,以锚泊定位系统为主;水深在1 500~3 000 m的水域作业时,采用锚泊辅助动力定位系统;水深大于3 000 m的超深水海域作业时,采用全动力定位系统。另一方面,半潜平台在工作时,必须满足一定的定位精度,一般取水深的2%~4%。而这3 种定位方式中,锚泊定位相对成本较低,但是在深水条件下,环境条件较为恶劣时定位精度满足不了平台的工作需求;相对而言,动力定位的定位精度很高,且反应迅速,但却十分消耗能源[3]。因此如果采用锚泊系统与动力定位系统联合定位的方式,则既能满足平台在较恶劣海况下的定位精度需求,又能降低动力定位时的燃油消耗[4],是一种理想的定位方式。
从经济角度分析,无论是初期投资还是使用和维护费用,锚泊定位系统与动力定位系统相比均具有明显的优势,尤其是在钻井周期较长、天气和海况恶劣的条件下进行作业,采用锚泊定位系统或锚泊定位系统加动力定位辅助定位模式,其作业成本将会大幅度降低,这也是多年来锚泊定位系统始终得到广泛应用的主要原因。此外,动力定位系统的操作和日常维护的技术要求过于严格苛刻[5],使得锚泊定位系统仍是半潜式平台定位的首选。
2 锚机的功能和配置要求
为了满足在海洋恶劣工况条件下进行海洋油气资源勘探开发等工程作业的需要,必须在较长一段时间内精确地保持钻井采油平台在海面上的位置,这就需要安装锚泊定位系统,平衡海浪等作用在钻井采油平台上的水平推力,使其不致发生较大漂移。锚泊定位系统主要由锚机、锚缆、锚等三部分组成,其中锚机是系统中最重要的设备。半潜式平台配套锚机一般布置在近正方形平台的四个角,如图1。它的配置有多种形式,主要取决于钻井平台的大小和形状、工作水深、所受环境载荷及水下装备(隔水管、液压连接器、水下BOP 等)所决定的平台允许水平偏移。它不仅关系到保证平台正常作业的定位能力,也与平台的许多重要因素有直接关联影响,如可变载荷、电站配置等。因此,平台锚机的配套能力和配套方式应视平台本身特点及载荷要求等影响因素,综合分析计算后,最终确定其设计参数和结构。

图1 半潜式平台配套锚机
3 国内外技术发展及现状
目前,半潜式平台用重型锚机的制造厂家主要有国外的Hisman 公司、Oil states 公司和NOV 公司。这些公司设计的平台配套锚机都为电驱动锚机,分为直流驱动和交流变频驱动两种类型,而交流变频驱动由于调速幅度宽、扭矩大等优势,现已是主要发展方向。中石油下属宝鸡石油机械有限责任公司作为国内最大的钻井装备制造企业,近年来加大海洋装备的开发力度,先后开发设计有滚筒式锚机、链式锚机和摩擦绞车+储存绞车等三种形式的平台配套锚机。但由于发展时间市场培育期等原因,在锚机的系列化、技术性能和市场认知度方面与国外公司还存在较大差距,短期内还很难进入此市场。所以,世界上在使用及建造的半潜式平台配套锚机都为国外几家公司所垄断。
4 锚机类别及其特点
现如今半潜式钻井平台用重型锚机多采用双配置结构(即一套动力装置和传动装置驱动两套执行机构工作模式)。具体结构采用“单电机+单台减速箱+双离合器+双齿轮副+双滚筒”传动形式,用于锚的收放,进行锚泊定位。一套双配置结构可分别布置2 个锚,达到一机两用的效果。有的甚至采用三配置结构,例如我国首座自主设计、建造的第六代深水半潜式钻井平台“海洋石油981”采用12 点锚泊定位,利用1 套动力装置和传动装置驱动3 套执行机构工作(即下3 个锚)。随着半潜式钻井平台的不断发展,所采用的锚泊定位系统不断面临新的技术挑战。目前全球半潜式平台配套重型锚机主要有以下4 种形式。
1)滚筒式锚机。
滚筒式锚机见图2,整体结构运用了两项自有专利技术[6-7],从其结构形式可知,该结构锚缆只适用钢丝绳,由于不需要锚链,平台不需要设置锚链舱,节省了大量空间。两套滚筒通过牙嵌离合器分别进行驱动,滚筒用来存储钢丝绳并通过缠绕产生拉力。在进行滚筒式锚机设计时,预设定哪一层钢丝绳为张紧层,是设计中的关键环节。由于滚筒上的钢丝绳容绳量较多,缠绳层数可达十几层,为防止乱绳现象,一般都设计有强制排绳装置,通过在滚筒与排绳装置之间设计一组链轮,来保证缠绳和放绳时,钢丝绳在滚筒中排列整齐有序。该类型锚机特点:设备重量轻、占用空间小,多配套于浅水半潜式平台,可直接下锚或预下锚。作业水深2300ft(约合701 m)的“GSF Aleutian Key”和2800ft(约合853 m)的“GSF Rig 140”半潜式平台都为8 点定位,采用4 台该类型锚机布置在平台四角进行锚泊定位。

图2 滚筒式定位锚机

图3 链式锚机
2)链式锚机。如图3,其锚缆为锚链,根据锚机拉力大小的不同,选择不同级别的锚链,有R3s、R4、R4s 和R5等系列。根据相关规范和标准,设计适合相应规格锚链的锚链轮,锚链卡在锚链轮中,电机通过减速箱驱动锚链轮旋转,产生锚链拉力,无论锚链布置长短,拉力都保持不变。这种结构不需要排绳装置,但平台需设置锚链舱用来专门存储锚链。该类型锚机特点:设备重量轻,甲板面占用面积小,但锚链重量远大于钢丝绳重量,对平台可变载荷产生一定的影响。目前,半潜式平台主流配置为该形式锚机,“海洋石油981”即配置了该形式锚机,并配合动力定位系统对平台进行锚泊定位。
3)摩擦绞车+储存绞车。
摩擦绞车+储存绞车见图4、图5,它的锚缆是钢丝绳,摩擦绞车采用双滚筒结构,钢丝绳前出绳与锚相连,产生很大的拉力,钢丝绳经过在两滚筒之间进行缠绕,一般为7~8 圈,这样钢丝绳的拉力就迅速降下来,钢丝绳存储在摩擦绞车后面的储存绞车上。这种机构设计很好地避开了滚筒式锚机既要储存大量钢丝绳又要产生很大拉力的弊端,后面储存绞车只起到存储钢丝绳的作用,不承受很大的载荷,结构设计相对简单。该类型锚机特点:设备重量较重,但钢丝绳重量相对锚链较轻。

图4 摩擦绞车
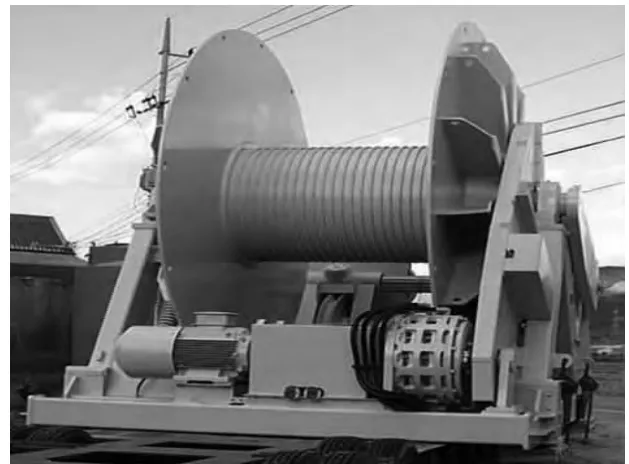
图5 储存绞车
4)链式锚机与摩擦绞车组合式+储存绞车。
链式锚机与摩擦绞车组合式+储存绞车见图6、图5,这种锚机是将锚链轮和摩擦绞车并联使用,锚缆可适用锚链和钢丝绳两种形式,通过锚链轮或摩擦绞车产生拉力。锚链存储在平台的锚链舱内,钢丝绳存储在储存绞车上,也可以带少量锚链,通过辅助船将大量锚链在锚泊点进行预抛锚,等平台就位后,将平台上的锚缆与之相连。该类型锚机特点:设备重量较重、占用空间大,可适用更大水深,多配套于深水半潜式钻井平台。作业水深5000ft(1 524 m)“ATWOOD FALCON”半潜式平台为8 点定位,采用4 台该类型锚机布置在平台四角进行锚泊定位。

图6 链式锚机与摩擦绞车组合式
5 结语
通过对半潜式平台配套的4 种锚机形式的介绍,对于半潜式平台具体选配哪种形式的锚机,应该综合考虑预投资成本、抛锚时间、平台可接受载重能力等因素,确定锚机具体结构形式。结合国内海洋石油勘探开发市场的实际情况。笔者认为,应加大开发力度,提高产品的性能及可靠性,增强平台配套重型锚机的市场推广力度,以目前平台广泛采用的链式锚机为突破口,实现半潜式平台配套锚机国产化。石油是国家的重要战略资源,只有打破国外的技术垄断,具备深水油气勘探开发与装备自主研发能力,才能为我国大规模开展深水油气开发提供强有力的技术支撑。
[1]Wichers J,Van Dijk R.Benefits of using assisted DP for deepwater mooring systems[C]//Offshore Technology Conference,1996.
[2]Alers A B,Merchant A A.The hydrodynamic model testing for closed loop DP assisted mooring[C]//Offshore Technology Conference,1996.
[3]孙攀,王磊,王亮.深水半潜平台锚泊辅助动力定位系统功率消耗研究[J].海洋工程,2010,28(3):24-30.
[4]IMCA Marine Division.Introduction to Dynamic Positioning[ED/OL].http://www.imca-int.com.
[5]潘文豪,叶邦全,别顺武,等.深水半潜式钻井平台锚泊定位系统论述[J].中国海洋平台,2011,26(2):8-12.
[6]李鹏,王定亚,任克忍,等.双滚筒一体式海洋锚机:中国,CN201769987U[P].2011-03-23.
[7]李鹏,刘小卫,武超,等.单气缸智能控制牙嵌离合器:中国,CN201835845U[P].2011-05-18.
猜你喜欢
海洋石油(2021年3期)2021-11-05 07:43:10
海洋工程装备与技术(2021年2期)2021-02-24 00:55:00
中国海上油气(2020年5期)2020-10-20 09:28:48
船海工程(2015年4期)2016-01-05 15:53:40
武汉理工大学学报(交通科学与工程版)(2015年5期)2015-12-05 02:19:55
江苏科技大学学报(自然科学版)(2015年3期)2015-03-07 08:27:44
机电产品开发与创新(2014年5期)2014-03-11 16:42:36
电子设计工程(2014年12期)2014-02-27 11:58:13
船舶力学(2014年5期)2014-01-19 05:50:04
中国矿业(2013年4期)2013-09-07 09:23:36