一种新的基于不变矩的步态特征身份识别算法
2014-11-20 08:19:38汪西原
电视技术 2014年5期
汪西原,闫 辉
(宁夏大学物理电气信息学院,宁夏银川750021)
1 算法简介
由于人体步态特征具有难以伪装,正常情况下不易修改,识别时具有远距离非接触,对系统分辨率要求低的特点而逐渐成为模式识别研究领域的一个重点。步态识别算法可分为基于模型(椭圆模型[1]、钟摆模型[2]、三维模型[3]等)和基于特征两种。由于运动过程中步态特征的复杂性,基于模型的方法描述步态运动具有一定的局限性。基于特征的方法如陈实等人[4]采用极直方图的方法描述步态轮廓;Rahati等人[5]采用小波变换;马勤勇等人[6]利用一幅步态轮廓图提取三段步态轮廓线;杨旗等人[7]提出的动静态信息融合及动态贝叶斯网络的步态识别算法等。但是,当人体目标与摄像机在相对运动过程中出现几何变化(位置、尺度和方向)时,上述基于特征的方法无法获得准确的步态特征信息,因此识别的正确率会降低,而利用不变矩提取的特征对发生几何变化的图像也有很好的不变性,尤其可以很好地描述视频序列中单帧人体形状的步态特征,如林敏等人[8]提出了一种基于统一Hu矩和支持向量机的步态识别算法;张前进等人[9]提出了基于Radon变换特征提取的步态识别;Xiao等人[10]提出了基于Zernike矩和BP神经网络的步态识别算法;Lu[11]利用伪Zernike矩联合付立叶描述子和小波描述子并采用决策级融合的方法进行步态特征识别。但是,这些基于不变矩的步态识别算法需要对视频序列中检测到的灰度目标图像进行二值化和归一化处理,之后再进行不变性特征的提取,而二值化过程会造成很多细节与有用信息丢失,归一化过程则会引入重采样与重量化误差,这必然导致算法识别率的降低。
为了克服上述不足,本文将基于Radon变换和解析Fourier-Mellin变换[12]的不变性特征提取算法应用于步态识别。由于直接对灰度图像进行特征提取,没有二值化和归一化,因此得到的特征具有更多的细节信息,对原图像有更好的描述能力。图1和图2为两种算法实现框图。

2 相关工作
该算法首先对目标灰度图像利用Radon变换(见图2)将原图像的旋转变化转化到沿H方向平移的投影空间(见图3),尺度变化转换为在r轴的尺度与幅度变化,然后对Radon投影空间利用解析Fourier-Mellin变换进一步变换,由此即可实现将Radon投影空间H方向的平移和r轴的尺度变化与幅度变化分别转化为相位因子和幅度变化,最后即可通过定义一些具有旋转与尺度不变性的函数提取步态特征,应用分类算法实现分类识别。
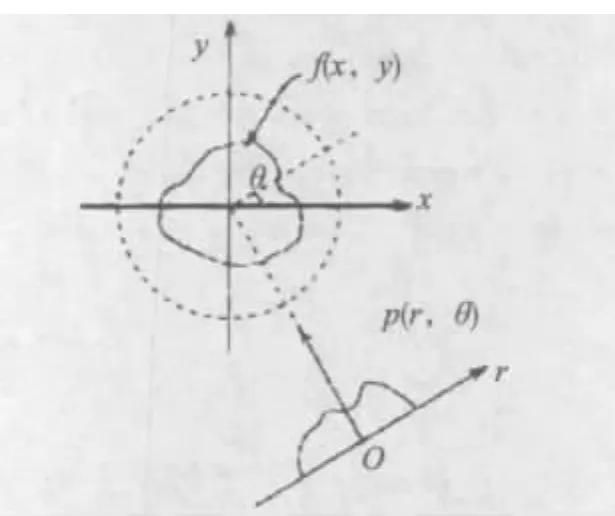
图3 f(x,y)的Radon变换
2.1 Radon变换及其性质
对于一个二维函数f(x,y),它的Radon变换就是该函数沿平面内不同的直线的线积分,如图3所示。其定义如下

对于图像的几何变换,Radon变换有以下性质:
1)平移性质

2)旋转性质

3)尺度变换性质

2.2 解析 Fourier-Mellin 变换
用极坐标表示的情况下,二维函数g(r,θ)的解析Fourier-Mellin变换的定义式为

式中:s=σ-iu,u为实数变量,σ为大于0的实常数,一般取值为0.5。因此式(5)可以写为

3 本文算法描述
本文对于步态的识别过程主要分为两个步骤,首先是对视频序列中检测到的人体运动目标进行步态周期的检测并得到一个步态周期的关键帧,其次是利用不变性特征函数对得到的关键帧提取不变性特征并用K近邻分类算法对特征进行分类识别。
3.1 步态周期检测
根据人体宽度变化分析步态周期是一种相对简单的方法,人体下肢的宽度变化一般不会受到其他因素的影响,因此本文根据人体下肢区域宽度来分析步态周期。此处的下肢区域的高度指的是膝盖到脚底的距离,这个距离既不会受到上肢的影响,也可以很好地反映步态周期的变化。需要说明的是,根据医学对人体研究表明,膝盖到脚底的高度约为人体高度的0.260倍,如图4所示[13]。
在正常的行走状态下,步态具有重复性,也就是说具有准周期性。根据医学上对步态周期的定义,如图5所示,以右脚跟着地为起始点,当左脚跟着地时为半个周期,当右脚跟再次着地时即为一个步态循环。因此,根据人体下肢的宽度变化就可以得到人体运动的周期。
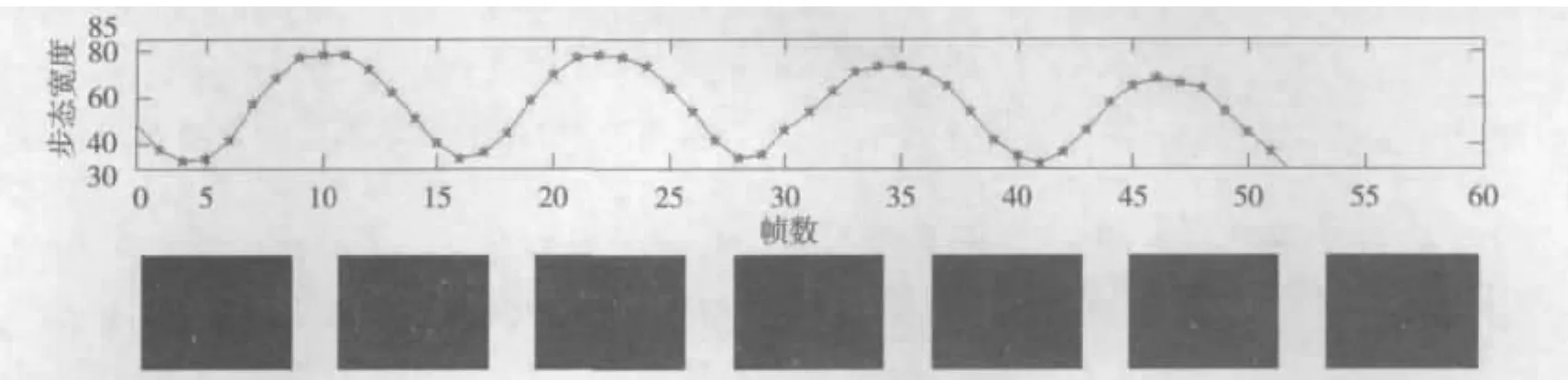
图5 人体步态周期分析
由于已采用上述方法检测到了一个运动周期内步态宽度的最大值和最小值,可以将这些极值帧作为关键帧,如果想得到更多的关键帧,可以在极值帧之间选取得到。
3.2 步态特征提取及识别
设图像f(x,y)经过尺度因子λ与角度旋转φ变换后获得的图像为(x,y)表示,则由式(2)~式(4)可得(x,y)的Radon变换为

式中:P(r,θ)是函数f(x,y)的 Radon 变换。对P^(r,θ)进行Fourier-Mellin变换后有

dr=λdτ ,dθ=dβ ,式(8)可变为

式中:M(u,k)为函数P(r,θ)的 Fourier-Mellin 变换。
由式(9)可以看出原图像f(x,y)的旋转和尺度变换经过Radon变换和Fourier-Mellin变换后转化为相位和幅度因子,由此可以定义函数
由式(9)和式(10)可得
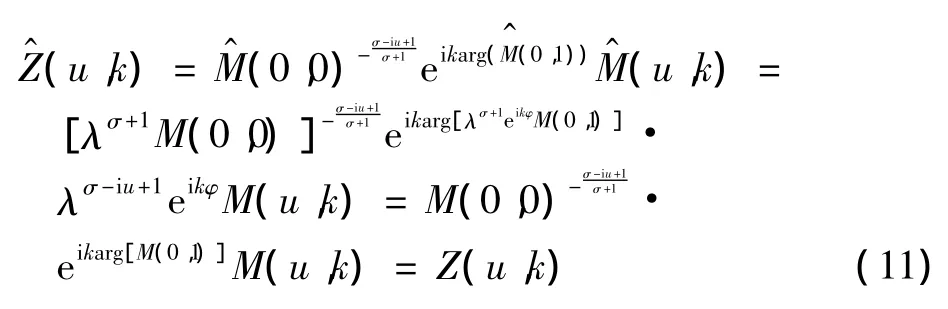
由式(11)可知,函数Z(u,k)与原图像的旋转和尺度变换无关,因此基于不变函数Z(u,k)提取旋转和尺度变换后图像的不变性特征如下
4 仿真实验结果
算法采用MATLAB2008编程进行实验仿真。所采用的数据库(CASIA步态数据库)是由中科院自动化所提供,本实验从中分别选取了10个人和20个人,每个人有2个步态的视频序列。每个人的一个步态视频作为训练样本,另一个作为测试样本,分别采用Hu矩、Zernike矩和本文的不变矩进行步态特征的提取和识别。此处本实验选取了1个步态周期内的8幅关键帧图像(如图6所示)进行步态特征的提取,其图像和对应的不变矩特征如表1~表3所示。

图6 1个步态周期的关键帧图像
表中F1,F2,…,F8表示图6中从左至右每一个关键帧图像,e,H,Z分别代表不同算法得到的矩特征。
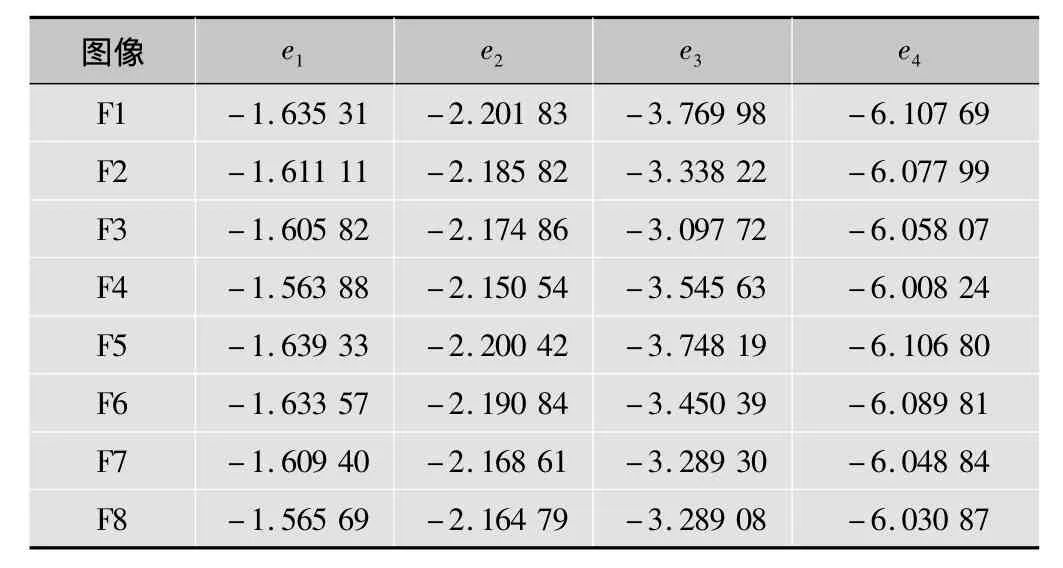
表1 本文不变矩提取不变性特征得到的特征值
采用K近邻算法分类得到的识别正确率如表4所示。由表4可以看出,在均采用K近邻分类算法时,本文提出的步态特征提取算法的分类能力较好,有效解决了目前基于不变矩的步态特征提取算法需要对灰度图像进行二值化和归一化的问题,克服了目前方法仅能对二值图像提取步态特征的不足,同时,采用本文算法提取的步态特征的分类正确率远高于目前采用Hu矩和Zernike矩的方法,说明本文算法应用于步态识别是可行且更有效的。

表2 Hu不变矩不变性特征得到的特征值

表3 Zernike不变矩不变性特征得到的特征值

表4 3种算法的分类正确率
5 结论
本文提出了一种基于Radon变换和解析Fourier-Mellin变换的步态识别算法,该算法首先对灰度图像进行Radon变换,之后再进一步进行Fourier-Mellin变换,这样就避免了目前基于不变矩的方法对灰度图像二值化和归一化时所造成的量化误差和细节信息的丢失,因此,采用本文算法提取的特征更准确地描述了步态信息,进行步态识别有更高的识别率。但是,与目前成熟的指纹、虹膜等识别方法相比,本文算法的识别率还有待于进一步提高,尤其是当样本数据增大时,识别率也明显下降,下一步工作的研究重点是将本文算法提取的特征与颜色、纹理、人耳或人脸等一种或多种特征融合以提高算法识别率,同时考虑采用快速Fourier变换来提高算法执行效率,使本文算法最终达到实际应用的目的。
[1] XU JH,WANGC,LIJ,etal.Gait recognition based on key frame and ellipticalmodel[C]//Proc.2010 IEEE International Conference on Information and Automation(ICIA).Harbin,China:IEEE Press,2010:2483-2487.
[2] HEW H,LIP.Gait recognition using the temporal information of leg angles[C]//Proc.2010 3rd IEEE International Conference on Computer Science and Information Technology.Chengdu,China:IEEE Press,2010:78-83.
[3] JEGOON R,KAMATA S.Front view gait recognition using spherical spacemodelwith human point clouds[C]//Proc.2011 18th IEEE International Conference on Image Processing.Brussels,Belgium:IEEE Press,2011:3209-3212.
[4] CHEN S,GAO Y X.An invariant appearance model for gait recognition[C]//Proc.2007 IEEE International Conference on Multimedia and Expo.Beijing,China:IEEE Press,2007:1375-1378.
[5] RAHATI S,MORAVEJIAN R,KAXEMI F M.Gait recognition using wavelet transform[C]//Proc.the Fifth InternationalConferenceon Information Technology:New Generations.Las Vegas,USA:[s.n.],2008:932-936.
[6]马勤勇,聂栋栋,王申康.基于主运动轮廓线的步态表示与识别[J].自动化学报,2009,35(5):519-525.
[7]杨旗,薛定宇.动静态信息融合及动态贝叶斯网络的步态识别[J].中国图象图形学报,2012,17(7):783-790.
[8]林敏,吴清江.基于统一Hu和支持向量机的步态识别[J].微计算机信息,2010,26(13):197-199.
[9]张前进,徐素莉,孙炎增.基于Radon变换特征提取的步态识别[J].数据采集与处理,2010,25(2):268-272.
[10] LU JW,ZHANG E H.Gait recognition for human identification based on ICA and fuzzy SVM throughmultiple views fusion[J].Pattern Recognition Letters,2007,28(16):2401-2411.
[11] XIAO D G,YANG L.Gait recognition using zernike moments and BP neural network[C]//Proc.2008 IEEE International Conference on Networking,Sensing and Control.Sanya, China:IEEE Press,2008:418-423.
[12] WANG X,XIAOB,MA JF,etal.Scaling and rotation invariantanalysis approach to object recognition based on radon and Fourier-Mellin transforms[J].Pattern Recognition,2007,40(12):3503-3508.
[13]苏开娜,刘玉栋,马丽.身份识别中步态特征的提取[J].北京工业大学学报,2005,31(4):388-393.
猜你喜欢
科学大众(2024年5期)2024-03-06 09:40:34
计算机工程(2020年3期)2020-03-19 12:24:50
中国听力语言康复科学杂志(2019年3期)2019-06-24 09:51:20
电子制作(2018年18期)2018-11-14 01:48:04
自动化学报(2018年6期)2018-07-23 02:55:42
中国交通信息化(2018年3期)2018-06-13 03:27:58
大连理工大学学报(2017年4期)2017-08-07 07:03:20
中国交通信息化(2016年2期)2016-06-06 07:28:02
重庆交通大学学报(自然科学版)(2016年1期)2016-05-25 00:37:00
西北工业大学学报(2015年3期)2015-12-14 13:08:46