
车厢可卸式垃圾车拉臂系统的刚柔耦合仿真分析*
2014-11-18 12:28樊智敏郑贤哲
机电工程 2014年11期
樊智敏,郑贤哲,王 娜,石 文
(青岛科技大学 机电工程学院,山东 青岛 266061)
0 引言
车厢可卸式垃圾车是一种便捷、高效的垃圾运输车辆,可以很方便地实现垃圾箱自动装卸和垃圾自卸的功能,广泛适用于城市街道、学校的垃圾处理。随着我国环保意识的加强以及对生活环境质量的重视,对车厢可卸式垃圾车的需求量逐年增加。针对车厢可卸式垃圾车拉臂系统变负载、多工况的工作特点,研究者通过有限元分析软件进行静强度刚度分析的传统方法已不能满足产品设计的要求:①难于确定计算所需的危险工况的边界条件;②没有考虑动载对静强度分析的影响。刚柔耦合分析是多体动力学与有限元相结合的技术,是CAE 技术发展的方向。在车厢可卸式垃圾车结构设计中采用刚柔耦合分析方法,能够动态分析各种工况中的应力应变,同时也可以向后续的结构优化提供更准确的载荷预测数据[1-2]。
笔者以5 t 车厢可卸式垃圾车拉臂系统为研究对象,使用ADAMS 软件和ANSYS 软件联合仿真,建立拉臂系统的刚柔耦合动力学模型,通过仿真分析,实现满载装卸工况下的动力学强度分析。
1 多柔体系统的动力学理论
多柔体系统动力学研究对象是由有大量刚体和柔性体相互连接组成的系统,其研究方法一般是在多刚体系统动力学的基础上,对系统中的刚体进行柔性化处理。由于导入到ADAMS 中的拉臂系统三维模型被默认为多刚体系统,若想得到拉臂在满载装卸工况下的应力、应变的动态变化规律,需要将拉臂在ANSYS中进行柔性化处理,并在ADAMS 中进行刚柔替换,得到刚柔耦合模型。根据柔性动力学理论,本研究采用模态集成法建立柔性体拉臂的动力学方程[3-4]。假设局部坐标系的位置采用惯性参考系中的笛卡尔坐标X=(x,y,z),欧拉角α=(ψ,θ,φ)和模态坐标q=(q1,q2,…,qn)(其中,n 为模态坐标数)来表示,则柔性体广义坐标的位置可表示为:

式中:x,y,z—局部坐标系相对于整体坐标系的空间位置坐标;ψ,θ,φ—局部坐标系相对于整体坐标系原点的欧拉角;qj—第j 阶模态振幅的振型分量。
由于柔性体是由离散化的有限个节点自由度来表示物体的无限多个自由度,这些节点的线性局部运动可以近似的用少量模态振型或模态振型向量的线性叠加来表示。由此可得柔性体节点i 的位移向量为:

式中:A—柔性体局部坐标系到惯性参考系的转换矩阵,si—柔性体节点i 在局部坐标系中未变形时的位移,φi—柔性体节点i 的移动自由度模态矩阵子块。
通过对节点i 的位移向量求一阶导数和二阶导数,可以得到第i 点的速度向量和加速度向量,从而得到柔性体的动能和势能分别为:

通过以上运动学关系,柔性体的运动方程可以从下列拉格朗日方程导出:
式中:L—拉格朗日函数,L=T-V;Γ—能量耗散项;Ψ—约束方程;Q—与外力对应的广义力。
最终根据拉格朗日乘法建立柔性体拉臂的运动微分方程为:

式中:K—模态刚度矩阵;D—模态阻尼矩阵;Kξ—物体内部由于弹性变形产生的广义力;Dξ—物体内部由于阻尼运动产生的广义力;fG—重力。
2 拉臂系统虚拟样机模型建立
2.1 拉臂系统刚柔耦合建模
拉臂系统刚柔耦合运动仿真流程如图1 所示。在车厢可卸式垃圾车拉臂系统刚柔耦合分析中将拉臂作为弹性体进行柔性化处理,将翻转架、锁紧架、副车架等作为刚体仿真模型。
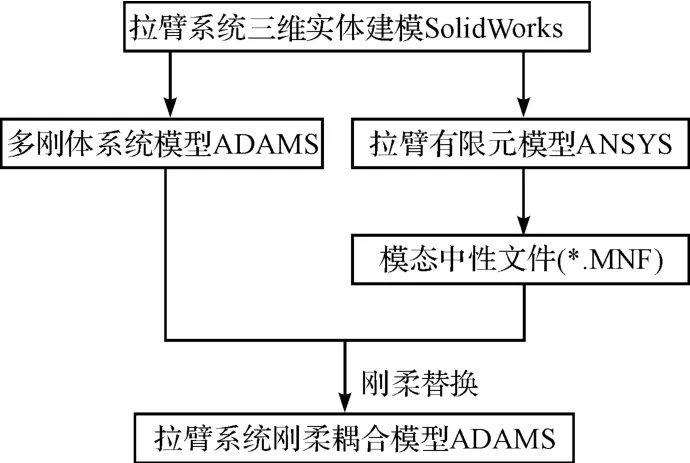
图1 刚柔耦合运动仿真流程
根据5 t 车厢可卸式垃圾车拉臂的结构特性和ANSYS 软件对单元特性的要求,本研究选择shell63 单元与mass21 单元创建拉臂装配体的有限元模型,在添加约束的位置创建刚性区域,得到拉臂模态中性文件(* .MNF)。
拉臂装配体的有限元模型如图2 所示。
其中,有限元模型材料属性设置如下:弹性模量为2.06×1011Pa,泊松比为0.3,密度为7 801 kg/m3。
本研究在ADAMS/View 中建立车厢可卸式垃圾车拉臂系统的ADAMS 多刚体系统模型,然后将柔性化的拉臂装配体模型导入到ADAMS/View 中进行刚柔替换处理[5-10],得到其刚柔耦合模型如图3 所示。

图2 拉臂装配体有限元模型
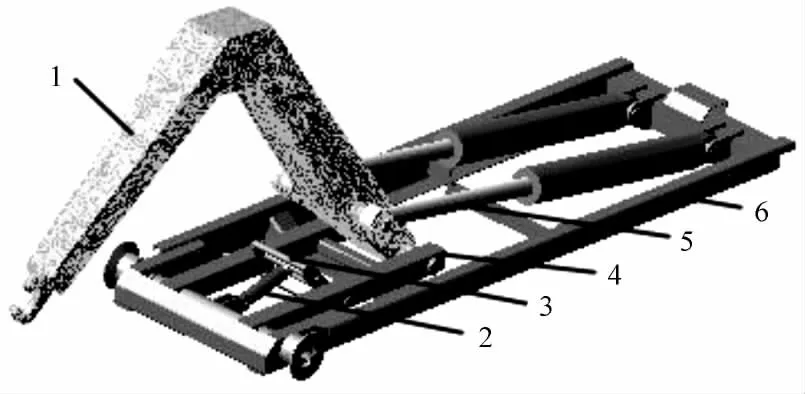
图3 拉臂系统刚柔耦合模型
2.2 运动副间约束和驱动的添加
在ADAMS/View 中,拉臂与举升油缸、拉臂与翻转架、举升油缸与副车架、翻转架与锁紧架、翻转架与副车架尾轴、锁紧油缸与锁紧架、锁紧油缸与副车架后梁油缸支座之间,均采用平面转动副进行约束;举升油缸筒与活塞杆、锁紧油缸筒与活塞杆均采用平面移动副进行约束;副车架采用固定副与大地进行约束;箱体纵梁与副车架导向轮、箱体滚轮与地面(混凝土)、锁紧架与箱体底部设置碰撞接触力进行约束。
驱动采用step 函数,添加在油缸移动副上。举升油缸:step(time,0,0,35,870)+step(time,40,0,55,-300)。锁紧油缸:step(time,35,0,40,90)[11-12]。
3 仿真结果分析
仿真分析时,笔者设置车厢可卸式垃圾车所配垃圾箱满载质量为5 000 kg;副车架导向滚轮与垃圾箱底部纵梁、垃圾箱滚轮与地面(混凝土)的静摩擦因数分别为0.15 与0.08,动摩擦因数分别为0.1 与0.05,等效接触刚度为2×106 N/mm,等效阻尼为180 kg/m·s,接触点法相穿透深度为0.1 mm,幂指数为2.2,设置仿真工作步长为0.01。
3.1 油缸作用力分析
满载装箱时油缸作用力变化曲线如图4 所示。由图4 可见,满载装箱开始瞬间,举升油缸活塞杆收缩,油缸作用力迅速增大;当垃圾箱箱体前轮与地面分离时(拉臂转角为40.1°),由于箱体滚轮与地面的碰撞接触力、摩擦阻力和惯性力的作用,举升油缸作用力产生波动;随着垃圾箱箱体被吊起,举升油缸作用力开始下降;当垃圾箱箱体底部纵梁接触到副车架上导向滚轮时,举升油缸作用力突然增加(拉臂转角为104.2°),随后又开始下降;同时由于箱体底部纵梁与导向滚轮之间的碰撞冲击作用,使得举升油缸作用力产生波动;当拉臂转角为141.2°时,由于满载垃圾箱重力的作用,举升油缸作用力方向开始变化,直至增大到另一个峰值。

图4 满载装箱时油缸作用力变化曲线
举升卸料时油缸作用力变化曲线如图5 所示。由图5 可见,满载装箱开始瞬间,举升油缸活塞杆伸出,油缸作用力瞬间增大;随着垃圾箱箱体被举起,举升油缸作用力开始下降。由于满载箱体在举升过程中的惯性力作用,举升油缸作用力产生波动。由图4、图5 可知,举升倾卸垃圾时举升油缸最大作用力大于满载装箱时举升油缸最大作用力。
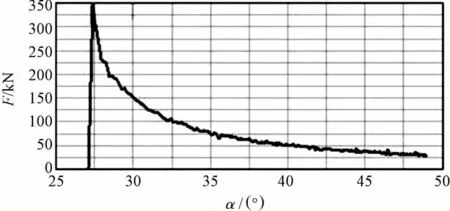
图5 举升卸料时油缸作用力变化曲线
3.2 拉臂作用力分析
满载装箱时拉臂钩作用力变化曲线如图6 所示。由图6 可见,满载装箱开始瞬间,由于箱体与地面的摩擦阻力和惯性力的作用,拉臂钩作用力突然增大;当垃圾箱箱体的前轮与地面分离后(拉臂转角为40.1°),拉臂钩作用力小幅度减小;当箱体底部纵梁接触到副车架上导向滚轮时,由于箱体底部纵梁与导向滚轮之间的碰撞冲击作用,使得拉臂钩作用力产生较大波动;随着垃圾箱箱体逐渐被放置到副车架上,拉臂钩作用力不断减小。
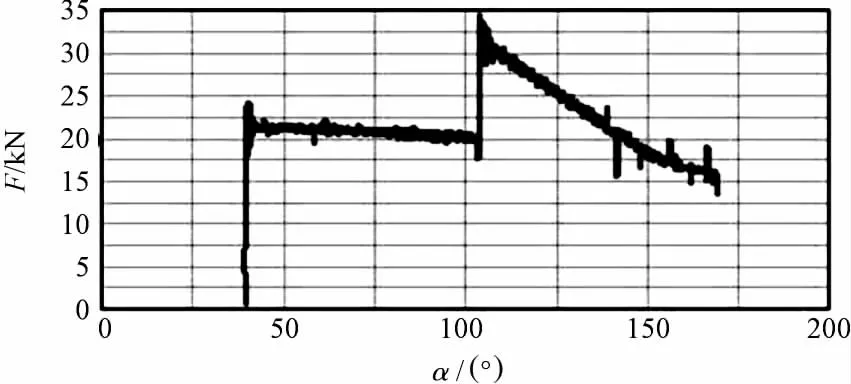
图6 满载装箱时拉臂钩作用力变化曲线
满载装箱过程中拉臂与活塞杆连接铰链点作用力曲线如图7 所示。从图7 可见,满载装箱开始瞬间,铰点作用力突然增大;当垃圾箱箱体前轮与地面分离后,铰点作用力迅速下降,当垃圾箱箱体底部纵梁接触到副车架上导向滚轮时,铰点作用力增加,之后逐渐减小;当拉臂转角为139.2°时,铰点作用力又开始增加。
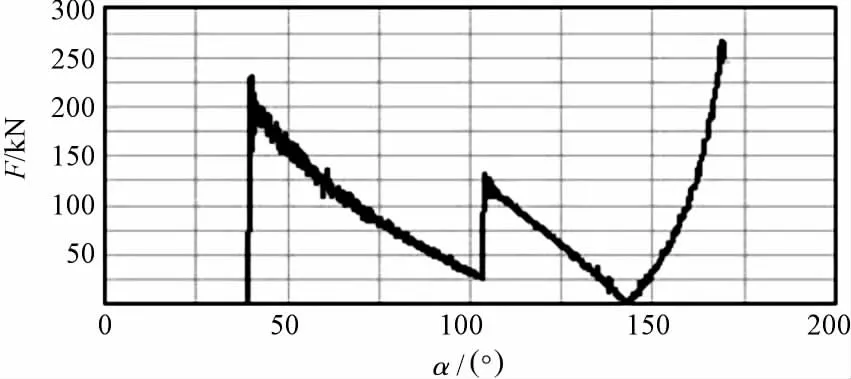
图7 满载装箱时拉臂与活塞杆连接铰链作用力变化曲线
3.3 拉臂强度分析
本研究在ADAMS 中,通过对车厢可卸式垃圾车拉臂系统的刚柔耦合仿真分析,可得到拉臂满载装卸过程中的应力、应变的动态响应。由联合仿真结果可得,在垃圾箱箱体底部纵梁接触到副车架导向滚轮且车厢后轮离地时(拉臂危险工况状态图如图8 所示),拉臂装配体应力、应变出现最大值。

图8 拉臂危险工况状态图
在该工况时拉臂装配体的应力与应变分布云图分别如图9、图10 所示。
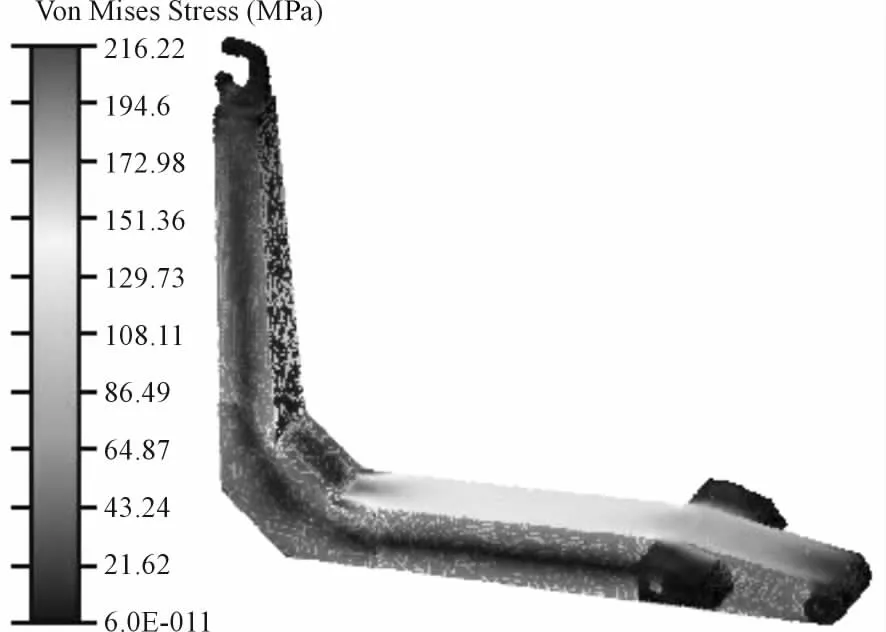
图9 拉臂应力分布云图

图10 拉臂变形云图
由图9、图10 可知,在满载作业过程中,拉臂装配体结构的最大应力发生在拉臂拐弯处,最大Von-Mises stress 为216.22 MPa,最大Von-Mises strain 为2.73 mm。拉臂由低合金钢板焊接而成,该材料的屈服极限为345 MPa,计算安全系数n=345/216.22=1.59。因此,该结构能够满足满载装卸工况下的强度要求。
4 结束语
基于ADAMS和ANSYS 软件,本研究采用shell63单元与mass21 单元,建立了车厢可卸式垃圾车拉臂系统刚柔耦合动力学模型,通过仿真分析拉臂系统在满载装箱和举升卸料过程中的动态响应,得出了其满载装卸工况下的油缸力、拉臂作用力以及拉臂应力、应变的动态变化规律。
该研究为车厢可卸式垃圾车拉臂系统的进一步结构优化提供了可靠依据,对于产品设计开发、结构性能改进具有较为重要的指导意义。
[1]孟祥德,詹隽青,李立顺.自装卸系统虚拟样机设计与仿真分析[J].现代制造工程,2007(1):47-49.
[2]王 承,吴 森,汪新云,等.基于虚拟样机技术的自卸车举升机构仿真与优化[J].武汉理工大学学报:信息与管理工程版,2003,25(3):78-80.
[3]陈佑方.柔性多体系统动力学[M].北京:高等教育出版社,1996.
[4]仲 昕,杨汝清,徐正飞,等.多柔体系统动力学建模理论及其应用[J].机械科学与技术,2002,21(3):387-389.
[5]LIU A Q,LIEW K M.Non-linear substructure approach for dynamic analysis of rigid-flexible multibody system[J].ComputerMethodsin Ap-pliced Mechanics and Engineering,1994,114(3):379-396.
[6]李富柱,郭玉琴,何成文,等.装载机工作装置刚柔耦合运动学动力学分析[J].计算机仿真,2007,24(10):304-306.
[7]赵丽娟,马永志.刚柔耦合系统建模与仿真关键技术研究[J].计算机工程与应用,2010,46(2):243-248.
[8]刘楷安,李秋菊,姜学寿.刚柔耦合的提梁机主梁结构仿真研究[J].现代制造工程,2011(5):76-80.
[9]陈露丰,宁晓斌.液压挖掘机工作装置的动态强度仿真分析[J].机电工程,2013,30(8):924-928.
[10]SAKAI M,AMAZAKI Y,EIYAMAGUCHI S,et al.Mechanical analysis of organic flexible devices by finite element calculation[J].Physica Status Solidi (a),2014,211(4):795-799.
[11]白丽平.基于ADAMS 的机器人动力学仿真分析[J].机电工程,2007,24(7):74-77.
[12]陈峰华.ADAMS 2012 虚拟样机技术从入门到精通[M].北京:清华大学出版社,2013.
猜你喜欢
娘子关(2018年2期)2018-11-13
上海大中型电机(2017年3期)2017-11-13
中学生数理化·高三版(2016年2期)2016-09-10
中学生数理化·高二版(2016年6期)2016-05-14
专用汽车(2016年9期)2016-03-01
专用汽车(2016年4期)2016-03-01
铁道科学与工程学报(2015年5期)2015-12-24
专用汽车(2015年4期)2015-03-01
河南科技(2015年2期)2015-02-27
中国卫生(2014年5期)2014-11-10
