基于接收信号强度的非视距检测与修正算法
2014-11-17 07:14赵泰洋郭成安
数据采集与处理 2014年3期
赵泰洋 郭成安
(大连理工大学电子信息与电气工程学部,大连,116024)
引 言
在基于到达时间(Time of arrival,TOA)的定位系统中,当移动节点与定位基站间存在障碍物时,无线信号只能以非视距(Non-light of sight,NLOS)方式传播。在这种情况下基站得到的TOA值就会存在NLOS误差。NLOS误差已成为影响无线定位系统定位性能的一项重要因素。随着移动节点所处环境的变化,NLOS误差呈现不同的分布[1],因此如何减少其对定位性能的影响已成为当前的一个研究热点。现有的NLOS误差处理算法,大多分成两个步骤:(1)对TOA测量结果进行检测,判断其中是否含有NLOS误差;(2)采用一定的方法对含有NLOS误差的TOA值进行修正,减小NLOS误差的影响。
对于TOA值中NLOS的检测,常用的方法可分为两类:(1)对一系列TOA值进行分析的方法,如文献[2-4]中,分析采集到的多个TOA值的概率分布函数,文献[5]采用对多个TOA值进行平滑处理的方法检测NLOS误差。文献[2-5]的方法都需要短时间内多次测量TOA值,这样会大大增加移动节点的功耗,这与移动节点的小体积、低功耗的要求是矛盾的。文献[6-7]提出了一种迭代残差法,该方法适用于提供TOA值的基站数量大于最少基站数的情况,当参与定位的基站数量较少时体现不出其优势。文献[8,9]针对超宽带(Ultra wide bandwidth,UWB)系统提出了一种基于多径分量统计特性的NLOS检测方法,但该方法不适用于传统的调制通信系统。
另一类就是采用TOA与其他信号参量(如波达方向,信号强度)进行数据融合的方法[10-12]。因为采用了另一个维度的信息,有可能得到更好的结果。但这类方法其计算量通常也要大于第1种方法。对于含有NLOS误差的TOA值,文献[5-7]直接放弃含有NLOS误差的TOA值,这种方法适用于有多个可选TOA值的情况,但当移动节点附近基站较少时,无法采用这种方法。在这种情况下常采用 Kalman滤波[2-4]或加权最小二乘法[8]抑制NLOS误差。
本文提出一种采用(Receive signal strength,RSS)与TOA数据融合的方法,通过检测RSS的变化程度来修正TOA测量值。该方法首先利用TOA测量值与RSS值之间的关系,得出该TOA测量值中存在NLOS误差的可能性。之后根据该可能性的大小对TOA测量值进行修正,最后用修正后的TOA值进行定位。实际应用结果表明,本文提出的算法与单纯基于TOA的定位方法相比,可有效地抑制NLOS对TOA值的影响,从而提高定位精度。
1 系统模型
本文讨论的基于TOA的无线定位系统中,基站与移动节点通信,在通信过程中获取移动节点到基站的TOA和基站接收信号的RSS。在LOS信道环境下的TOA测量值为

对于NLOS信道环境

式中:T0为移动节点和基站间电波的视距传播时间,te为由TOA测量系统引起的均值为零的高斯随机变量。tNLOS为由NLOS所引起的附加时延,是一个均值大于零的随机变量。
对于RSS,参照文献[13]中的公式,可得到LOS信道的RSS值表示为

NLOS信道的RSS值表示为

式中:P0为移动节点的发射功率;PLOS(d)为信号在空气中的传播损耗,是一个与传播距离有关的量;e为测量误差,是一个均值为零的高斯随机变量;PNLOS为在NLOS传播过程中信号在反射点的反射损耗,是一个均值为正的随机变量。
2 算法描述
2.1 NLOS误差检测
在本文讨论的定位系统中,假设移动节点与某一基站间距离为d0,在视距(Light of sight,LOS)传播时,对应的TOA值为T0。对于NLOS传播的情况,当信号经过反射后,信号的传播路程为d,对应TOA值为T。显然d大于d0,T大于T0。此时测得的信号强度为RSSNLOS。根据式(3)可以计算出LOS传播情况下距离为d时,基站接收信号强度为RSSLOS。定义这两种情况下的接收信号强度的变化量为ΔRSS,即

从式(3,4)可知,理论上这个差值ΔRSS即是反射损耗PNLOS,为一个非负的值。在实际应用中,由于测量误差的存在,该差值有可能为一个绝对值较小的负数。
ΔRSS可以反应信号的传播状态,ΔRSS越大,说明信号在传播过程中附加损耗越大,即存在NLOS传播的可能性就越大。由于无线传播环境的复杂性,很难给出一个阈值来准确判断一个TOA测量值中是否含有NLOS误差,因此采用软判决的方法,定义一个反映存在NLOS可能性的参数RNLOS如下
式中:R0为一个归一化因子,其值与系统的具体工作环境有关。
2.2 采用RSSI值对含有NLOS误差的TOA值进行修正
对于2.1节讨论的NLOS测距,若能找到ΔRSS与tNLOS之间的关系,即可在一定程度上消除NLOS对TOA测量值的影响。但由于移动节点的位置及周围环境有极大的不确定性,不可能找到一个确定的函数关系从ΔRSS精确解出tNLOS。然而通过对大量实验数据的分析,发现NLOS误差与ΔRSS之间有一定的统计关系。例如,NLOS误差的均值与ΔRSS有一定的相关性。利用这一相关性,设法得到二者之间的统计关系,从而可以对TOA测量值进行修正,以降低NLOS误差对TOA测量结果的影响。
根据这一思路,本文设计一个具体实现的算法。该算法分为统计学习和误差修正两个步骤。
在统计学习步骤中,设法得到定位系统中无线信号的传播特性,该步骤的具体算法如下:
(1)确定出无线信号在LOS传播情况下的信号强度与传播距离之间的关系,即式(3)的具体表达式。
(2)对于不同的ΔRSS,通过测试实验,计算出tNLOS的均值MNLOS,用于后续对TOA测量值的修正。MNLOS可表示为

式中:N为测试次数。
在误差修正步骤中,当基站测量得到一组TOA值和RSS值后,采用下面的算法对TOA值进行修正:
(1)利用式(3)计算出LOS情况下对应TOA测量值的RSS值RSSLOS。
(2)按式(5)计算 RSSLOS和RSS测量值的差值ΔRSS。
(3)利用该组ΔRSS和式(7)计算出均值MNLOS。
(4)对TOA测量值进行修正:从TOA测量值中减去MNLOS,得到修正后的TOA值。
3 算法实现
为了考查本文提出的算法性能,本文设计了一个基于NanoPAN扩频测距模块的室内无线定位实验系统。NanoPan测距模块是由Nanotron公司生产的一款工作于2.45GHz频段的射频通信模块,采用Chirp扩频调制,通信带宽最大为80MHz。该模块采用对称双边双路测距方式。该方式利用测量数据包在两个模块间进行双向传输的时间来计算TOA。这种方式不需要两个节点的时钟同步,降低了对硬件时钟的要求。除TOA外,该模块还提供接收机中可变增益放大器(Variable gain amplifier,VGA)的放大倍数。该VGA采用自动增益控制(Automatic gain control,AGC),使输出信号强度P基本保持不变,所以可以从AGC值(即VGA的放大倍数)计算出接收信号强度RSS来,即

该实验系统采用基于基站的定位方式。基站与移动节点均采用NanoPan作为射频通信模块。移动节点在与基站通信的过程中,基站可得到移动节点到基站的TOA和此时基站接收机中的AGC值。然后基站将这两个信息通过网络传输给数据处理中心,计算出修正后的TOA值。采用同样的方法,利用多个基站提供的TOA值,然后采用多维标度法(Multidimentional scale,MDS)[14]对移动节点进行定位。
该实验安排在一个长11.8m,宽8.9m的房间中进行。房间一面是玻璃窗,3面是混凝土的墙壁。房间内部有大量高约1.2m的木制障碍物(工作台),这些障碍物对于中间的测试点会造成NLOS问题。该实验场景如图1所示。图1中三角形为基站所在位置,圆圈为移动节点的测试位置。

图1 实验场景分布图Fig.1 Configuration of experiment environment
在实际应用问题中,第1节中给出的TOA测量模型(即式(3,4))所涉及的函数关系及其参数都是未知,因此并不能直接用来计算RSS与TOA之间的关系。针对该问题,本文通过2.2节给出的统计学习算法步骤,以实测方式来近似得到RSS与TOA的关系,进而利用式(7)计算出tNLOS的均值参数MNLOS。
对于该统计算法的具体实施,考虑到Nano-Pan通信模块提供的是TOA值和AGC值,为了减小计算量,本实验直接采用AGC值进行判断。在此情况下,式(3)可修正为

式中:Gd为距离为d时基站接收机中放大器的放大倍数。这时根据式(7),式(5)则修正为

式中:Gd′为实际的AGC测量值。
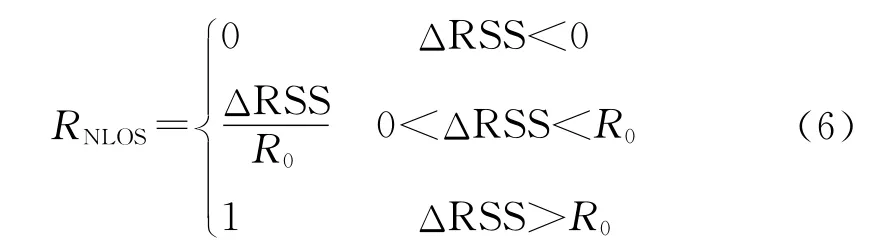
为了得到式(9)所描述AGC值与距离之间关系的解析表达式,本文设计了如下实验测试步骤:在无遮挡的环境下,测量出移动节点处于不同位置时基站得到的TOA和AGC值。在该实验中,每个位置做50次测量。然后对50次测量结果取α均值[15],即将50次实验结果按由小到大的顺序排列,之后取中间的30个值的均值作为实验测试值。图2所示的结果(图中的黑点)即为实验所得到的AGC值的α均值。
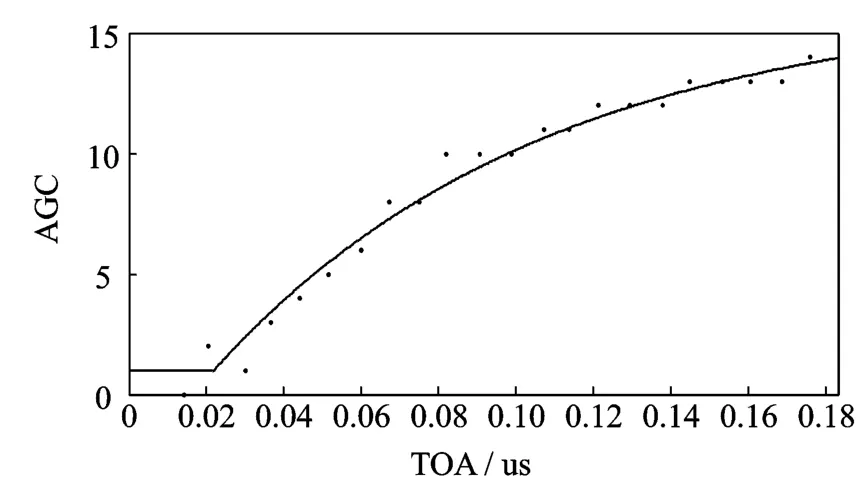
图2 直达波的TOA值与AGC值之间的关系Fig.2 Relationship between TOA & AGC of LOS signal
在得到实测数据后,本文进一步采用指数函数对实验数据进行拟合,以此来得到TOA值t与AGC值Gd之间的解析表达式。在本文的实验中,最后的拟合结果如式(11)所示

图2中的连续曲线即为该拟合函数所给出的曲线。
在得到LOS情况下TOA值与AGC值的关系之后,下一项工作是获得ΔRSS与tNLOS之间的统计关系,即式(7)的统计表达式。根据图1所示的实验环境,取单数号的节点位置作为测试采样点,每个点进行30次实验,记录基站得到的TOA值和AGC值。图3给出了室内测量得到的ΔRSS与测距误差tNLOS的实验结果,在本实验中对该组实验数据进一步采用多项式拟合的方法得到了ΔRSS与测量误差均值MNLOS间的近似解析表达式MNLOS(ΔRSS)=-0.0041ΔRSS4+0.086ΔRSS3-

图3中的各个圆圈为各次实验的实测结果,连续曲线则是通过多项式拟合方法获得的解析表达曲线。
图3 ΔRSS与测距误差的关系Fig.3 Relationship betweenΔRSS &ranging error
4 实验结果
4.1 TOA修正实验
该实验仍然在如图1所示的实验环境中进行。实验中采用一个移动节点在不同位置与某一基站通信,得到移动节点到达该基站信号的TOA值和AGC值。然后采用本文在2.2节中给出的误差修正算法对TOA值进行修正。
在此次实验中,移动站分别在如图1所示的位置2,3,11,13,15,18及21号7个位置与基站2进行通信,每个位置通信30次。图中每个位置的数据是30次实验的平均结果。表1是未采用本文修正方法的测量结果,表2是采用了本文修正方法的最终结果。对比表1与表2,可见后者的测量误差较前者有明显的改善。
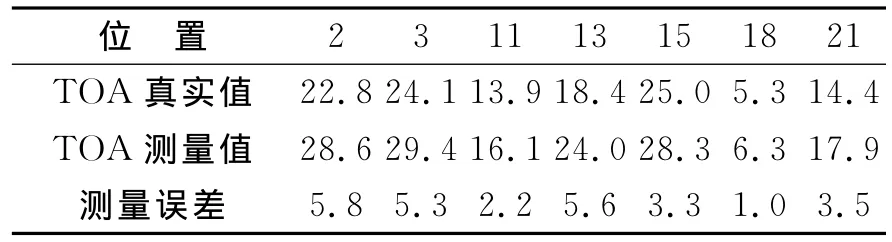
表1 未采用本文修正方法的TOA测量结果 nsTable 1 Results of TOA measurement without correction
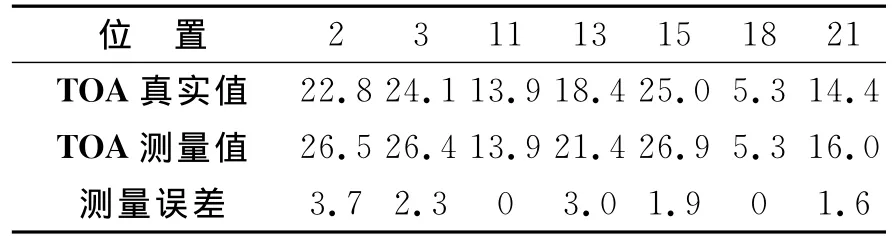
表2 采用本文修正方法的TOA测量结果 nsTable 2 Result of TOA measurement with correction
4.2 定位实验
本文还进行了定位实验。图4给出了移动节点分别在2号,15号和21号位置处各30次未采用及采用RSS的定位实验结果。

图4 两种定位算法的室内定位结果Fig.4 Results of positioning method with and without RSS compensation
表3给出了各个位置上的具体实验结果。表中的数据为平均定位误差,即30次实验的定位结果与真实位置距离之差的平均值。从表3中可见,除了位置11外,对其他各个位置,本文提出的采用RSS补偿的TOA定位方法的定位精度都比直接采用TOA值定位的结果要好。对于位置11,采用本文算法的定位结果略微逊于直接定位算法。因为在11号位置处,虽然与基站之间存在障碍物,但无线信号并没有产生反射,而是穿过了障碍物。这样造成了TOA测量值误差不大的情况下,RSS值却有了较大的衰减。所以在进行TOA误差修正时,跟据RSS的衰减对TOA值进行了较大的修正,使修正结果的误差大于实测值的误差,这样就造成了该处修正效果不佳,但这时二者定位误差均比较小,本文算法并未造成明显的不利影响,而从总体的实验结果来看,这种补偿算法还是比较有效的。

表3 两种定位方法的平均定位误差比较Table 3 Mean positioning error of two positioning methods
5 结束语
本文针对无线定位系统中的NLOS问题,提出了一种采用RSS对TOA值进行补偿的算法,该算法计算复杂度较低,在不增加通信次数的前提下,可提高定位精度。文中采用实验方式在室内环境下实现了该算法,给出了一套具体的算法实施方案,并进行了大量定位实验,实验结果表明该算法是有效的。
[1]Wang Wei,Jost T,Fiebig U C.Characteristics of the NLOS bias for an outdoor-to-indoor scenario at 2.45 GHz and 5.2GHz[J].IEEE Antennas and Wireless Propagation Letters,2011,10:1127-1130.
[2]黄耀光,高 博,李建新,等.基于平方根UKF双向滤波的单站无源定位算法[J].数据采集与处理,2013,28(2):1-7.Huang Yaoguang,Gao Bo,Li Jianxin,et al.Square-Root UKF with forward-backward filtering for single-observer passive location[J].Journal of Data Acquisition and Processing,2013,28(2):1-7.
[3]Guan Weiguo,Deng Zhongliang,Yu Yanpei,et al.A NLOS mitigation method for CDMA2000mobile location system[C]∥2nd IEEE International Conference on Network Infrastructure and Digital Content.Beijing,China:IEEE,2010:668-672.
[4]耿剑,张玲华.一种基于修正卡尔曼滤波的蜂窝定位算法[J].数据采集与处理,2013,28(2):1-7.Geng Jian,Zhang Linghua,A cellular location method based on modified kalman filter[J].Journal of Data Acquisition and Processing,2013,28(2):1-7.
[5]Riba J,Urruela A, A non-line-of-sight mitigation technique based on ML-detection[C]∥ICASSP′04.Montreal,Quebec,Canada:IEEE,2004,2:153-156.
[6]Chen Pi chun.A non-line-of-sight error mitigation algorithm in location estimation[C]∥ WCNC 1999 IEEE.[S.l.]:IEEE,1999:316-320.
[7]Fukuda K,Okamoto E.Performance improvement of TOA localization using IMR-based NLOS detection in sensor networks[C]∥ICOIN 2012.Bangkok,Thailand:[s.n.],2012:13-18.
[8]Ismail G,Chong Chia-Chin,Watanabe F.NLOS identification and mitigation for UWB localization systems[C]∥ WCNC 2007.Hong Kong,China:[s.n.],2007:1573-1578.
[9]Guvenc I,Chong C C,Watanabe F,et al.NLOS identification and weighted least squares localization for UWB systems using multipath channel statistics[J].Advances in Signal Processing,2008,1:1-14.
[10]Wang Z,Zekavat S,Omni-Directed mobile NLOS identification and localization via multiple cooperative nodes[J].IEEE Transactions on Mobile Computing,2011,11(12):1-25.
[11]毛永毅,李明远,张宝军.一种 NLOS环境下的TOA/AOA定位算法 [J].电子与信息学报,2009,31(1):37-40.Mao Yongyi,Li Mingyuan,Zhang Baojun.A TOA/AOA location algorithm in NLOS environment[J].Journal of Electronics & Information Technology,2009,31(1):37-40.
[12]Wann ChinDer,Chin HaoChun.Hybrid TOA/RSSI wireless location with unconstrained nonlinear optimization for indoor UWB channels[C]∥WCNC 2007.Hongkong,China:[s.n.],2007:3940 -3945.
[13]Wang Qinghua,Balasingham I,Zhang Miaomiao,et al.Improving RSS-Based ranging in LOS-NLOS scenario using GMMs[J].IEEE Communications Letters,2011,15(10):1065-1067.
[14]陈璋鑫.LOS/NLOS无线定位方法研究[D].成都:电子科技大学,2009.Chen Zhangxin.Research on wireless localization in LOS/NLOS environments[D].Chengdu:University of Electronic Science and Technology of China,2009.
[15]Bednar J B,Watt T L.Alpha-trimmed means and their relationship to median filters [J].IEEE Transacations on Acoustics,Speech,and Signal Processing,1984,32(2):145-153.
猜你喜欢
Journal of Palaeogeography(2022年1期)2022-03-25
快乐语文(2021年35期)2022-01-18
导航定位与授时(2020年5期)2020-09-23
铁道通信信号(2020年9期)2020-02-06
法律方法(2019年4期)2019-11-16
知识经济·中国直销(2018年3期)2018-04-12
摄影之友(影像视觉)(2017年1期)2017-07-18
电子制作(2017年8期)2017-06-05
探索科学(2017年4期)2017-05-04
中国交通信息化(2016年8期)2016-06-06