
基于海上试验对海上漂移物运移轨迹影响因素的分析
2014-11-17 14:00:04黄娟徐江玲高松郭敬天
海洋预报 2014年4期
黄娟,徐江玲,高松,郭敬天
(山东省海洋生态环境与防灾减灾重点实验室国家海洋局北海预报中心,山东青岛 266061)
1 引言
随着海上运输业和旅游业的不断发展,航行船舶日益增多,出于海洋环境本身复杂多变,海上事故发生的可能性也随之增大。发生海难后如何进行海上搜救却是一个现实而又极其重要的课题。经过近十几年的不断发展,我国搜救事业[1]无论在搜救人员素质还是搜救装备质量上都得到了显著的提高。尽管遇险人员数逐年增多,但是搜救的成功率并没有明显提高,仅仅只是维持在一个范围之内。分析搜救失败的原因主要包括:搜寻定位失败,不清楚目标的漂移轨迹或者即使已经找到了落水人员,但是由于落水人员在低温水中时间过长已经死亡。因此,搜寻过程可以说是整个搜救行动的基石,可以说只要发现了目标,搜寻就成功了一半[2-3]。
一般来说,海上漂移物受自然因素的影响将不会出现在原事故地点或者最后报告位置,物体在海面漂移运动[4]的方程如公式(1)所示:

式中,V代表物体的速度,F代表物体所受的所有驱动力的和,一般是指风压、风生流、涌、波浪、潮流等。其中,由于风作用于目标的水上部分而导致目标对水的相对运动称为风压运用,对于一个给定的搜寻目标,很难确定风压大小和方向的确切值,在实践中,一般根据实验数据进行大致估算。海流的影响主要包括风生流以及潮流,其中风生流为持久的风吹动海面而形成的流,一般情况下,在风向不变并持续6—12 h时才产生当地表层风生海流。为更接近实际效果,应根据遇险事件发生前48 h内的风速和风向确定其确切值。潮流由于其潮涨潮落的反复拉动作用,总体上使目标停留在原地,从而减小对海上目标移动的影响。但必要时仍须加以考虑,因为当潮往返时,在某一方向上流的影响可能大于另一方向,对应不同的搜救时间,潮将会引起搜寻目标位置的变化,积累效果可能把搜寻目标拉入海流作用的区域。沿岸流是指进入浅水地带的波浪拍岸时,表层水质点呈显著的向前移动而形成的水流,上层向前流动,底层则形成回流,一般仅在离岸1海里的范围内才考虑。涌,对目标的影响一般可以忽略不计,因为涌是水质点的垂直运动。波浪对物体的作用一般都忽略不计,但是,日本海上保安厅对波浪中漂移物的漂移速度进行了试验研究[5],证明了漂移速度随波长而变化。一方面,在短波范围内,波浪漂移力量主要是波浪散射推动漂移物。因此漂移速度由波浪漂移力量的平衡性和流动力决定,它和波浪的倾斜成比例。另一方面,在长波范围内,波浪漂移力量几乎不对漂移物起作用。因为波浪几乎全部用来传送漂浮物。因此漂移速度由波浪的速度决定,并且与波浪的倾斜的平方成比例。因此,在近岸浅海地区对于小于30 m长度的物体波浪的作用一般不会被考虑。在上述影响目标的漂移因素中,风压、风生流及潮流是主要的,因此计算通常围绕这三个因素进行[6-8]。
并且,海上漂移物的漂移轨迹,除了与当地的海况和自然环境有关以外,漂移物的自身特性也对漂移轨迹有很大的影响,比方说浸没比例和压载状况。为了更好的确定自然因素对搜寻物漂移轨迹影响的参数,国外专家进行了多次海上实验以及实验室仿真实验[9-11],而在国内,为修正模型参数而进行的海上的仿真实验较少。因此,为了了解在青岛外海海域不同搜救目标的海上漂移路径对驱动条件的响应情况,我们于2011年7月20日在青岛大公岛外海海域开展了一次海上人员和无动力船只搜救、绿潮漂移预测的海上现场实验。通过对这三种物体的漂移轨迹的研究,并结合漂移预测数值模式结果来判断不同驱动力的影响因子。
2 海上试验方案及结果分析
为了获取海上落水人员、绿潮斑块和无动力船舶三种物体的漂移现场参数,于2011年7月20日在青岛大公岛外海海域开展了一次海上搜救和绿潮漂移预测海上现场试验。本次实验的内容包括:无动力渔船漂移模拟试验、落水人员漂移试验和绿潮斑块漂移试验。三个搜救目标的具体设置情况如下:

图1 模拟落水人员的假人示意图
(1)无动力渔船,长20 m左右,宽4—5 m左右。无动力渔船是搜救目标中最常见的一种;
(2)落水人员模型,重约75 kg,并穿着救生衣。海上搜救模拟人作为海上漂流试验中人的替身,需要测试的是一批人员落水后海上漂移的情况,而不是某一个人的漂流情况。所以,假人(见图1)的尺寸也必须以群体的尺寸特征来表示。同时考虑到人员在落水后会保持上半身浮在水面的特点,在假人的腿上绑上了相应重量的铅块。为了减少观测误差,本次实验释放了两个假人;
(3)绿潮斑块(图略),采取跟踪绿潮较大斑块边界的措施来跟踪绿潮的移动。
上述三种搜救目标都在2011年7月20日被连续跟踪12 h,并且目标释放的位置基本一致。
2.1 任务要求
(1)无动力渔船漂移模拟试验
渔船到达指定海域,无动力条件下进行漂移实验,数据采集要求如下:每10 s记录1次GPS位置;每10 min记录海面风速风向;搭载走航式ADCP测流,每1 min记录整层海流数据;连续漂移12 h。
(2)落水人员漂移模拟试验
同时同地点抛放2个模拟人,分两条船进行跟踪测量,每船跟踪1个,数据采集要求如下:模拟人漂移轨迹依船只GPS信息记录,每10s记录1次GPS位置;每10 min记录海面风速风向;搭载走航式ADCP测流,每1 min记录整层海流数据;模拟人相对位置记录每10 min1次;连续跟踪测量12 h。
(3)绿潮斑块漂移模拟试验
渔船在发现绿潮较大斑块的边界,跟踪绿潮斑块进行移动,数据采集要求如下:每10 s记录1次GPS位置;每10 min记录海面风速风向;搭载走航式ADCP测流,每1 min记录整层海流数据;连续跟踪测量12 h。
(4)数据采集方式
GPS数据采集采用仪器自动观测,风速风向数据采集使用手持风速仪观测,ADCP数据采集采用仪器自动观测方式进行。
2.2 漂移物轨迹分析
图2为四个跟踪目标(无动力渔船、假人1号和假人2号、绿潮斑块)的漂移轨迹。其中,深绿色线代表绿潮,浅蓝色线和粉色线代表1号落水人员模型和2号落水人员模型,蓝色线代表无动力船。四个目标的起始位置在红色三角符号标注的位置附近。从图中可以看出,被跟踪的绿潮斑块在8:00点的时候先向西南偏南向漂去,在13∶00点转向,向北接近于原路的方向返回,于13∶30点左右开始向西北偏西向漂去直至17∶49点开始向西。两个落水假人模型在水里的漂移路径几乎与绿潮的漂移轨迹一致,也是先向西南,然后在12∶00点至13∶30点向东北向返回,返回的时间不长,约为1.5 h,比绿潮返回的时间长了约1 h,然后向西北偏西方向移动,最后一直向西漂去。无动力船在水里的漂移轨迹与绿潮和落水人员的稍有不同,于9∶17释放后先是向西南漂去,在12∶40左右开始向西北向漂去,直到17∶00点开始一直向西漂移。
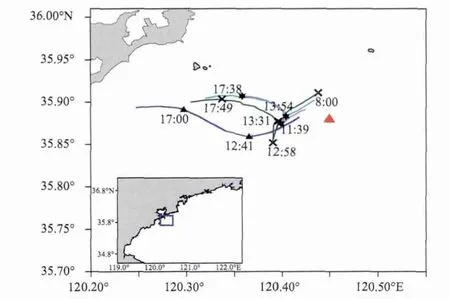
图2 跟踪目标轨迹(绿色线代表绿潮,浅蓝色线代表1号落水人员模型,粉色线代表2号落水人员模型,蓝色线代表无动力图的左下角显示了该海域在青岛外海的位置
2.3 漂移轨迹与影响因素的相关关系分析
为了分析各个监测目标漂移轨迹的成因,我们对各个目标物跟踪船上负载的ADCP测流进行分析。
图3为绿潮斑块跟踪船上负载的ADCP测量的流矢量随时间变化的曲线图。从图中可以看出,当时的流速平均在23 cm/s,最大为45 cm/s。于12∶00点之前基本上为西南向的流,之后至13:00表现为东向,13∶30至14∶50逐渐转为东北向,之后转向为西北向,最后在接近18∶00时转至西向。当天观测的海表面风随时间变化曲线见图4所示,从图中可以看出,该海域在当天基本上都是南风,10∶00前和18∶00后风速较小,中间时段风速较大,平均为3 m/s。绿潮斑块(见图2绿色线)开始在西南向流和南风的共同作用下向西南方向移动,当流转向为东向时,绿潮斑块开始向北偏东向移动,在海流转向为东北向的这段时间里,由于海流和风同向,绿潮斑块快速向东北向移动,随后继续跟随海流向西北向移动。由此可见,当天绿潮斑块在海面的漂移主要跟随海流的变化,略有延迟。
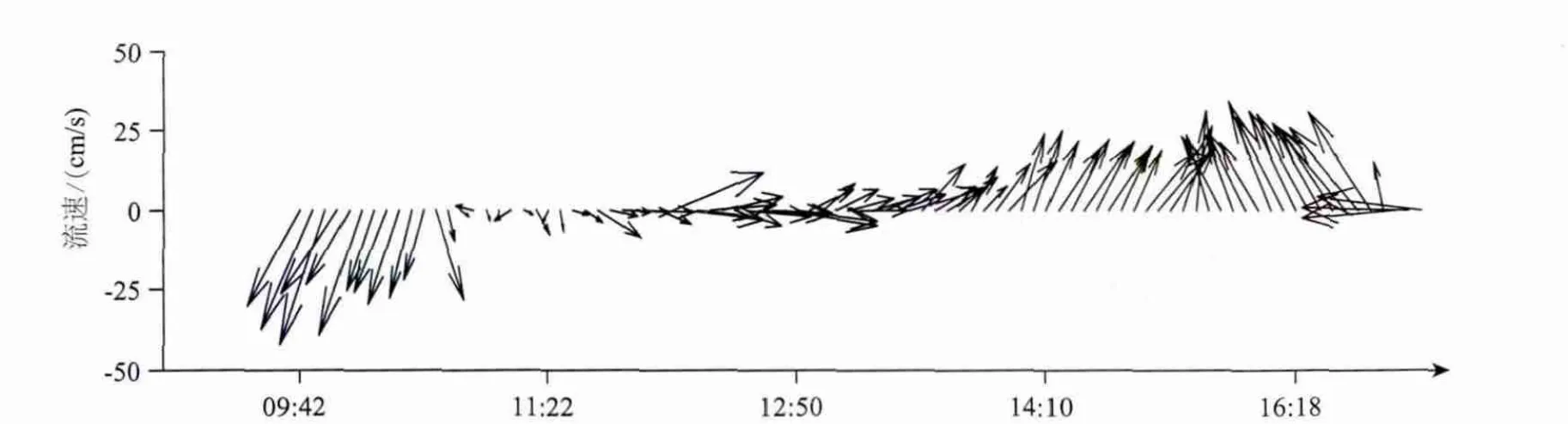
图3 绿潮跟踪船上负载的ADCP测量的流失量随时间变化曲线图
图5为1号落水人员模型跟踪船上负载的ADCP测流随时间的变化曲线。对比图3发现,该区域的海流变化与绿潮斑块跟踪船所在区域的海流变化基本一致,这也与两船相离距离不远的情况相符。从该图可以看出,当时的流速平均在27 cm/s,最大为64 cm/s。海流在11∶38之前一直表现为西南向,随后转为东北向,直至14∶00左右开始转为西北向,最后于17∶30份左右转为西向。对比图2中1号落水人员模型的漂移轨迹发现,两者之间的吻合度很高,几乎没有延迟。表明1号落水人员模型在水中的漂移受海流的影响较大,受风的影响小。
图6为2号落水人员模型跟踪船上负载的ADCP测流随时间的变化曲线。对比图5发现,该区域的海流变化与1号落水人员模型跟踪船所在区域的海流变化基本一致。从该图可以看出,当时的流速平均在30 cm/s左右,最大为73 cm/s。海流的变化趋势与2号落水人员模型的漂移轨迹相关性较高,几乎没有延迟。说明2号落水人员模型在水中的漂移与1号落水人员模型一样,受海流的影响较大,受风的影响小。
根据上节的轨迹述描述我们知道无动力船在水里的漂移轨迹与绿潮和落水人员模型的稍有不同,然而,对比无动力船跟踪船上负载的ADCP测流(见图7)和落水人员模型跟踪船上负载的ADCP测流发现,两个目标所在区域流场的变化情况基本一致。在12∶40至14∶00这段时间内,流场明显为东北向,但是无动力船并没有跟随潮流做往复运动,而是一直向西北向漂去,直至17∶00转向为西向。由此可见,无动力船在水里的运动受潮流的影响较小。结合当天的风场(图4)来看,当天的风速很小,平均在4 m/s左右,风向为东北风。风可能是阻碍无动力船随潮流向东北向反复运动的原因之一,虽然风速较小,但是由于船体漏在海面上的部分较假人和绿潮斑块要大,因此风的作用应该较后两者较大。
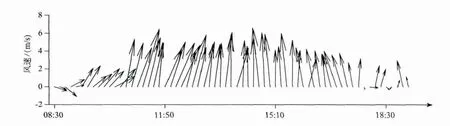
图4 2011年7月20日观测的海表面风场随时间变化曲线图

图5 落水人员模拟1号跟踪船上负载的ADCP测量的流失量随时间变化曲线
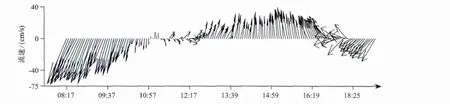
图6 落水人员模拟2号跟踪船上负载的ADCP测量的流失量随时间变化曲线
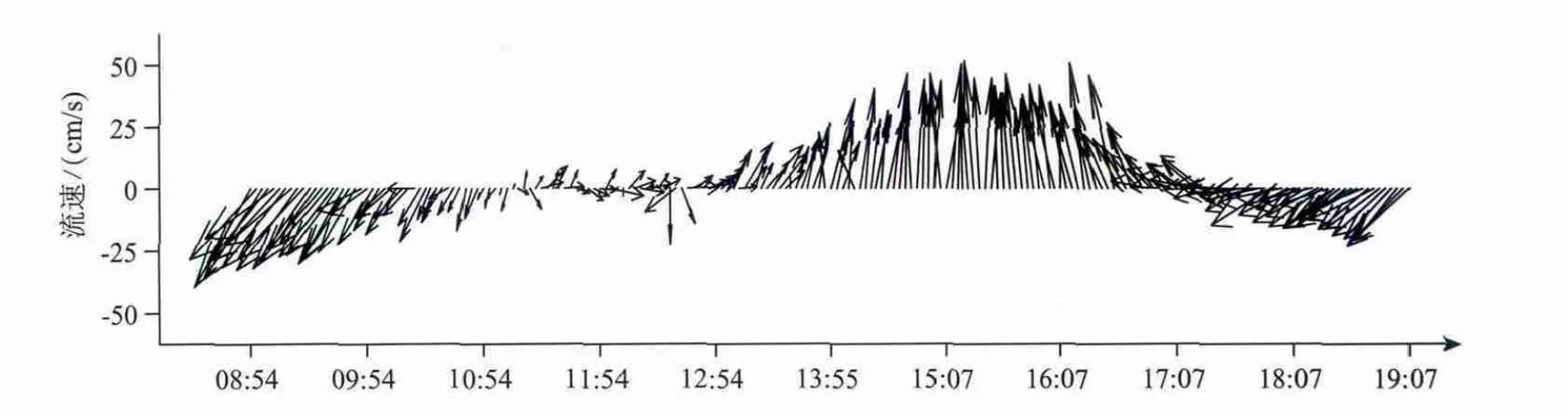
图7 无动力船上负载的ADCP测量的流失量随时间变化曲线
3 海上漂移预测数值模拟
3.1 数值模式简介
海上漂移预测模型采用Lagrange粒子追踪方法,计算漂浮物体在风和流的共同作用下的漂移轨迹。本文的海洋漂移预测模型使用的风场来自北海预报中心业务化WRF(Weather Research and Forecasting)大气模式。海流场来自海洋模式ROMS(Regional Ocean Model System)。为了提供精细化的海流场,分两个区域建立海流模式:大区是渤海和北黄海区(117°—127°E,33.5°—42°N),分辨率为1/30°,垂向6层;小区是青岛近海海域(119°—122.5°E,37.2°—34.5°N),具体范围见图4左下角,水平分辨率为1/120°,垂向6层。模式地形来源于GEBCO(General bathymetric Chart of Oceans)分辨率为1′×1′的数据,并采用海图水深和Google Earth进行水深和岸线订正。大区域模式采用全球海洋模式(HYCOM+NCODA Global 1/12°Analysis)模式的水位、流场、温盐场等输出结果作为大区域模式的初值和边值场,同时在边界上加上8个分潮(M2,S2,N2,K2,K1,O1,P1,Q1)来驱动;采用北海预报中心业务化WRF(Weather Research and Forecasting)大气模式的风场和热通量场作为大气强迫场。小区域模式是采用两重嵌套技术,大区域计算结果为小区模式提供初值和边值条件;大气强迫场与大区域模式相同。
海上漂移物在海水中的移动,可以看作是质点跟随海流的物理运行,所以采用拉格朗日粒子追踪方法。粒子追踪方法采用粒子随机走动模式来模拟粒子的运动,每个粒子的位移变量都可以由Lagrange方程来确定:



3.2 数值模型参数设计和模拟结果
本次海上试验的主要目的是通过海上试验的观测数据来修正现有海上漂移预测模型在该海域对该类漂移物的轨迹预测中模型参数的设定,修订已有的海流系数和风流系数[14-16]。通过调整风力系数和海流系数比例(即风作用力和海流作用力的相对比例)进行一系列对比实验,绿潮、假人和无动力船的实验结果分别见表1、表2和表3。

表1 绿潮漂移预测敏感性实验结果

表2 假人漂移预测敏感性实验结果
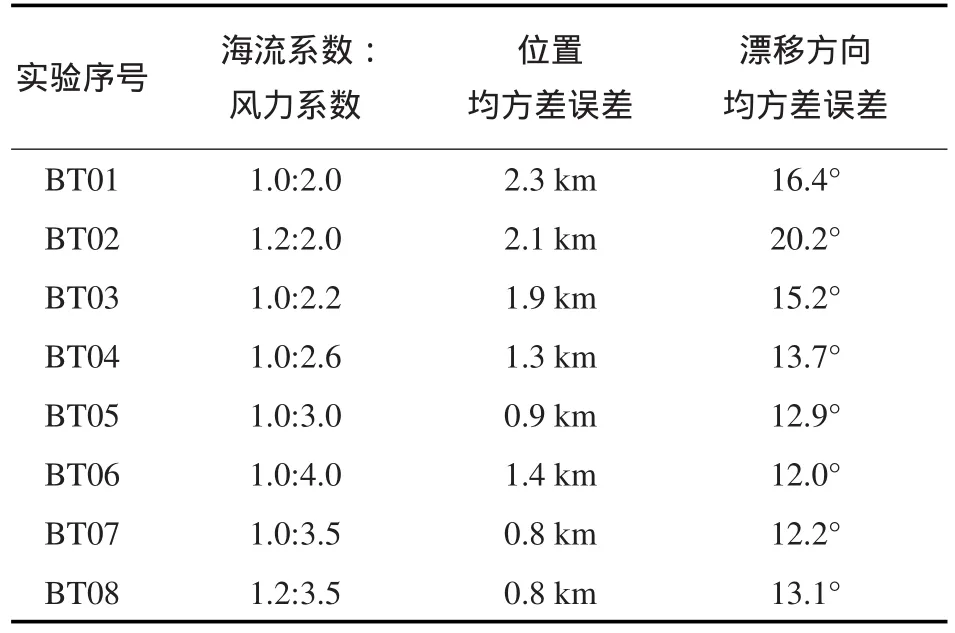
表3 无动力船只漂移预测敏感性实验结果
已有在该海区对绿潮漂移预测时,海流系数跟风力系数的比值1.5∶2.0,即模拟实验GT01,模拟的位置均方差误差和漂移方向的均方差误差均在合理的范围内。通过对海上实验观测数据的分析发现风对绿潮的影响较大,因此进行风力系数调大,海流系数不变的实验,发现GT02实验中位置均方差误差略有增大,但是漂移方向均方差误差减小;当风力系数保持不变,海流系数调大时(GT03),位置均方根误差和方向均方根误差都增大;最后发现当海流系数和风力系数比例增大为GT06时,漂移方向和位置均方根误差最小(模拟轨迹见图8所示)。
已有在该海区对落水人员漂移预测时,海流系数跟风力系数的比值1.5:1.2,即模拟实验PS01,模拟的位置均方差误差和漂移方向的均方差误差均在合理的范围内。通过对海上实验观测数据的分析发现海流对落水人员的影响比风对其的影响大,因此进行风力系数保持不变,海流系数调大的实验,发现PS02实验中位置均方差误差和漂移方向均方差均有增大;当海流系数保持不变,风力系数调大时(PS03),位置均方根误差和方向均方根误差都增大;因此将风力系数和海流系数均调小,最后发现两者之比为1.0:0.8时,即PS08实验,漂移方向和位置均方根误差最小(模拟轨迹见图9所示)。
已有在该海区对无动力船只漂移预测时,海流系数跟风力系数的比值1.5:1.2,即模拟实验BT01,模拟的位置均方差误差和漂移方向的均方差误差均在合理的范围内。当风力系数保持不变,海流系数增大时(BT02),位置均方差误差有所减小,但是漂移方向均方差误差增大,同时通过对海上实验观测数据的分析发现海表面风对无动力船只的影响比海流对其的影响大,因此进行海流系数保持不变,风力系数调大的实验,发现BT03实验中位置均方差误差和漂移方向均方差均减小;继续试验后,发现风力系数和海流系数两者之比为1.0:3.5时,即BT07实验,漂移方向和位置均方根误差最小(模拟轨迹见图10所示)。
4 讨论
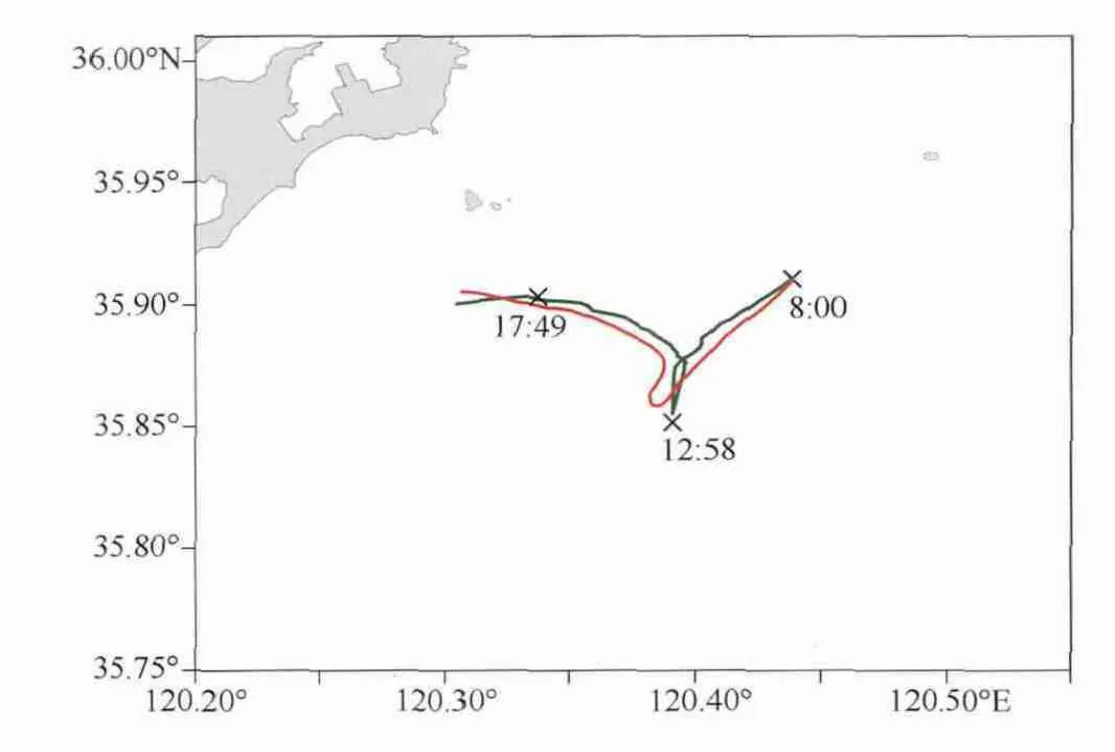
图8 绿潮漂移轨迹观测值(绿线)和模拟值(红线)
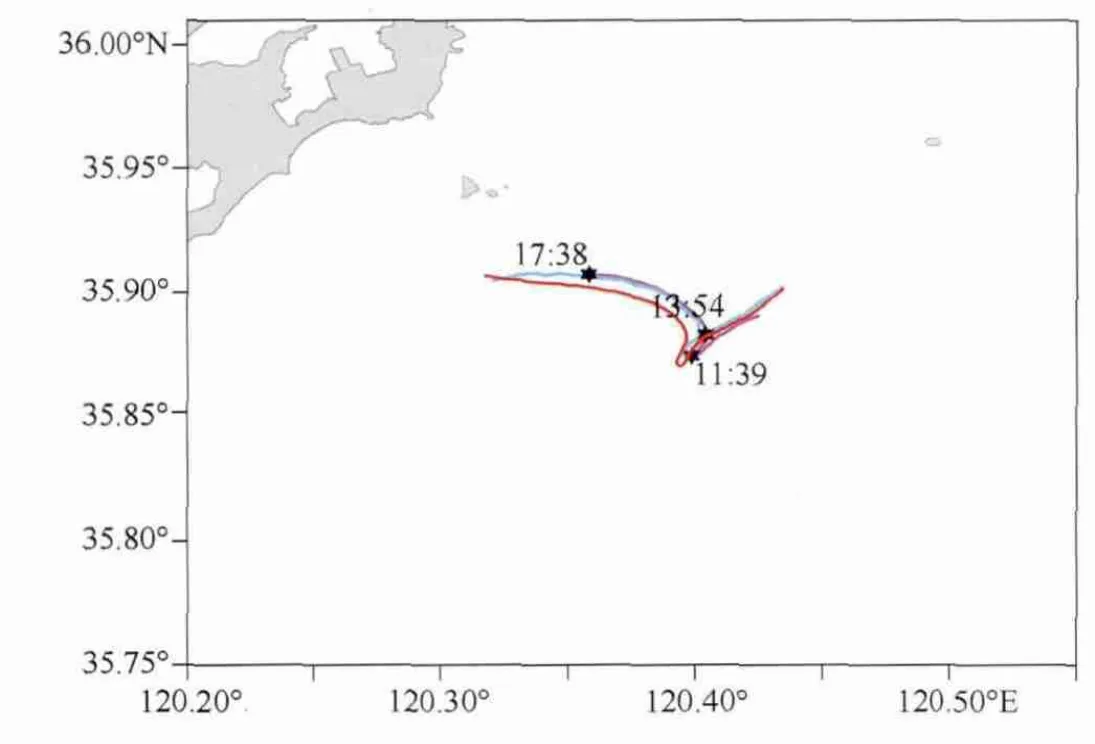
图9 落水人员漂移轨迹观测值(浅蓝线和粉线)和模拟值(红线)
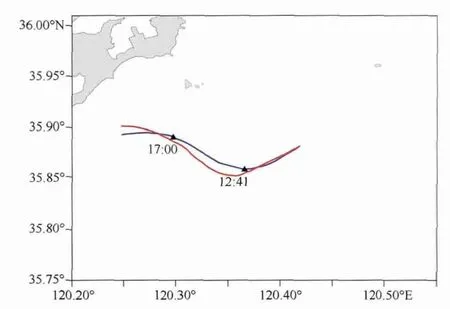
图10 无动力船漂移轨迹观测值(蓝线)和模拟值(红线)
对比ADCP观测的流场数据和漂移目标的轨迹,我们发现落水人员和绿潮在海上的漂移轨迹比较一致,落水人员受到海流的作用比绿潮大。由于绿潮漂浮在水表面,受风的影响比落水人员的大。无动力船的漂移轨迹与落水人员和绿潮稍有不同,受潮流往复作用小。由于无动力船在海上部分的体积较大,风应力的系数也相对增加。并且通过搜救的数值模型验证了上述结论。通过反复试验,更正了数值模型中海流系数和风力系数的比值,使得模拟结果更吻合于实测数据,提高了搜救模型对不同物体的漂移轨迹的预报精度。
[1]张晋文,邓顺华.前进中的中国搜救事业[J].中国水运报,2004,10:56-57.
[2]肖方并,尹勇,金一丞,等.海上搜寻规划方法研究综述[J].大连海事大学学报,2011,37(2):58-60.
[3]付玉慧,朱玉柱.水上安全监督管理(下)[M].大连:大连海事大学出版社,2011.
[4]王福谦.物体做漂流运动的速度特征[J].晋东南师范专科学校学报,2002,16(1):20-22.
[5]Kitakyushu.On the drift speed of floating bodies in waves[C].12thInternational Offshore and Polar Engineering Conference.2002,5.
[6]胡志武,张秋荣,顾维国.遇难船舶漂流轨迹预测技术[J].航海技术,2007(3):18-21.
[7]于卫宏,贾传荧.海上搜救搜寻区域确定方法研究[J].中国航海,2006(2):34-37.
[8]Tanizawa K,Minami M,Naito S.Estimation of wave drift force by numerical wave tank[C].Proc.9thInternational Offshore and Polar Engineering Conference,Brest,1999,3:323-330.
[9]施平安,吴晞.数字化海事案例特征提取与知识表示初探[C].第二届广东海事高级论坛,广州,2008.
[10]Liu Y H,Yang C S,Yang Y B,et al.Case Learning in CBR-based agent systems for ship collision avoidance[J].Lecture Notes in Computer Science,2009:542-551。
[11]张英菊,仲秋雁,叶鑫,等.CBR的应急案例通用表示及存储模式[J].计算机工程,2009,35(17):28-30.
[12]肖文军,堵盘军,龚茂珣,等.上海沿海海上搜救预测模型系统的研究和应用[J].海洋预报,2013,30(4):79-86.
[13]李云,刘钦政,王旭.海上失事目标搜救应急预报系统[J].海洋预报,2011,28(5):77-81.
[14]吴玲娟,曹丛华,黄娟,等.黄海绿潮应急溯源数值模拟初步研究[J].海洋科学,2011,35(6):44-47.
[15]黄娟,吴玲娟,高松,等.黄海绿潮应急漂移数值模拟[J].海洋预报,2011,28(1):28-32.
[16]白涛,黄娟,高松,等.黄海绿潮应急预测系统业务化研究与应用[J].海洋预报,2013,30(1):51-58.
猜你喜欢
遥感学报(2023年1期)2023-02-26 07:43:20
舰船科学技术(2022年11期)2022-07-15 07:54:38
自我保健(2021年2期)2021-11-30 10:12:31
妇女之友(2021年9期)2021-09-26 14:29:36
河北地质(2021年2期)2021-08-21 02:43:54
昆明医科大学学报(2020年11期)2020-12-28 00:47:08
中国海洋大学学报(自然科学版)(2020年8期)2020-08-03 01:04:00
百姓生活(2019年2期)2019-03-20 06:06:16
测控技术(2018年2期)2018-12-09 09:00:56
海洋科学(2017年5期)2017-10-14 15:40:15
