基于SVM和MPC的数字蚯蚓生物反应器温度及相对湿度动态预测控制
2014-11-05 13:53:06蔡永铭谷凌雁
生物技术进展 2014年1期
蔡永铭, 谷凌雁
广东药学院医药信息工程学院,广州 510006
利用蚯蚓处理城市污泥是一种新型生物处理方法[1~4]。蚯蚓具有特殊生物处理功能,可以使含有大量有机质和矿物质且伴有病原菌、虫卵及重金属等有毒物质的污泥有效转变为有机肥料。蚯蚓的生长和生存需要适当的温湿度环境,通常采用蚯蚓反应器装置为蚯蚓提供这样的特殊环境,因此蚯蚓生物反应器在生产转化过程中要求能够自动控制反应器内部的温度和湿度[5~7]。
为了使蚯蚓反应器内部达到相对恒定的温度和相对湿度,需要采用自动控制方法实现这个目标[8]。最常用的方法是通风换气,在蚯蚓生物反应器内安装循环风机鼓动气体循环流动,并在气体循环流动过程中对气体进行温度和相对湿度变化的处理。当空气经过加湿器时候使气体相对湿度得到提高;当空气经过冷凝设备时候降低气体温度和相对湿度;另外为蚯蚓生物反应器配置加热器来提高气体的温度。
蚯蚓生物反应器箱温度和相对湿度控制是一种非线性耦合滞后系统,核心问题是箱体内气体温度和相对湿度的有效控制。在工业生产环境中广泛使用加热、换气和空调系统(heating,ventilation and air-conditioning,HVAC)。该系统通常由许多机械、液压、电气元件组成,在整体上是动态且高度非线性的。暖通空调系统对温度和相对湿度之间相互作用的控制回路是非常复杂的。要实现准确地操作这些调节器和阀门,必须获得准确的系统模型。过去对暖通空调系统控制方法的研究多采用传统的控制理论,包括使用线性或非线性[9]方法,近年来神经网络 NNS[10,11]和模糊逻辑[12,13]也被应用于此类研究中。但目前对类似的复杂非线性耦合及滞后系统仍然缺乏有效控制方法,由于常规控制方法很难达到目标要求,现在采用PID方法控制蚯蚓生物反应器箱温度和相对湿度是比较常用的方法。这种方法的特点是独立控制温度和相对湿度。对于蚯蚓生物反应器箱这类需要定期进行进料和出料等动态开关操作的仪器,采用这种通用的控制方法适应性比较差。本文采用一种基于支持向量机器SVM(support vector machine)系统[14]进行回归,并且结合 MPC(model predictive control)模型方法对箱体温度和相对湿度进行动态预测控制。
1 数字蚯蚓生物反应器温湿度控制模型
1.1 数字蚯蚓生物反应器
本实验中设计的蚯蚓反应器是一个封闭的长方体容器,尺寸为2m3×1m3×0.6m3。箱体顶部安装有进气口和排气口。排气口气体由三通阀门进入冷却水箱后重新循环进入箱体。外面新鲜空气及加热暖湿混合气体则通过进气口进入箱体。冷却循环及热风循环开关的启动关闭都是通过自动控制系统控制,以保持箱体内部温度和相对湿度的恒定。蚯蚓反应器温度湿度控制结构如图1所示。
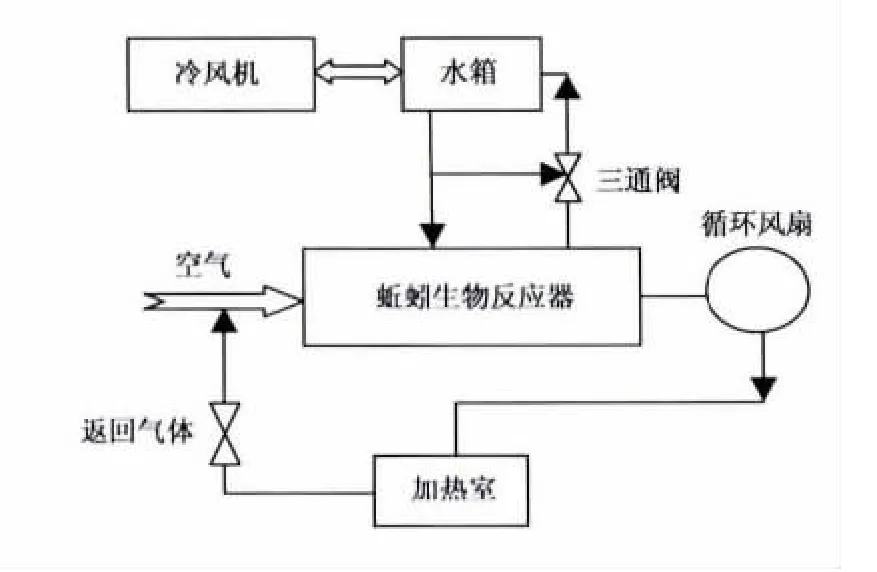
图1 蚯蚓反应器温度和湿度模型系统 Fig.1 Temperature and humidity model system of earthworms bioreactor.
蚯蚓反应器箱体空气通过三通阀开关后,通过冷却盘管在冷却水箱发生热交换。可以通过三通阀控制空气流向和速度的改变。当蚯蚓反应器箱体空气的温度和相对湿度降于阀值时候,需要减少冷水流量,同时控制变速风扇供给空气流进热室加温。本实验中的送风风扇能够提供的最大空气流率为18.3m3/min。为了避免损坏风扇,风扇的最高速度被限制在75%额定转速以内。在实验过程中,送风风扇速度和冷水阀开口是两个系统的控制变量。为了更好的循环,一共设置了6个循环风扇。其中有4个额定功率为0.63 kW,其他2个功率为0.75kW。这6个电机产生的热量作为加热室热量的来源。在工作过程中,6个变量的采样频率为每隔60s采集一次。采样的特征包括箱体内空气温度y1和相对湿度y2,新鲜空气温度w1和相对湿度w2,供风机速度u1和冷冻水阀门开度u2。
1.2 蚯蚓反应器温度湿度控制模型
蚯蚓反应器温度和相对湿度调节过程中,存在强相互耦合现象。当蚯蚓反应器内部温度低于设定阀值的时候需要加热升温,在升温过程中原来凝结的水分则会随着温度的升高而被蒸发,从而提高了气体中水分的含量,所以伴随温度升高相对湿度也被提高。与此相对应的是,如果蚯蚓反应器内部温度过高时需要进行降温,同样降温会导致气体中的水分凝结,因而气体温度降低的同时相对湿度也被降低。这个耦合程度会随着箱体的容积规格不同而发生变化。
蚯蚓反应器箱体由于尺寸不同,对应的加热和冷却压缩机的相关参数也要求不同,所以相应的温度和相对湿度控制模型参数需要做调整。另外一种情况是,对于蚯蚓反应器需要根据蚯蚓生长情况调节不同的温度和相对湿度,也就是可以根据实际需要随时调整气体目标温度和相对湿度。蚯蚓反应器温度和相对湿度模型如图2所示。
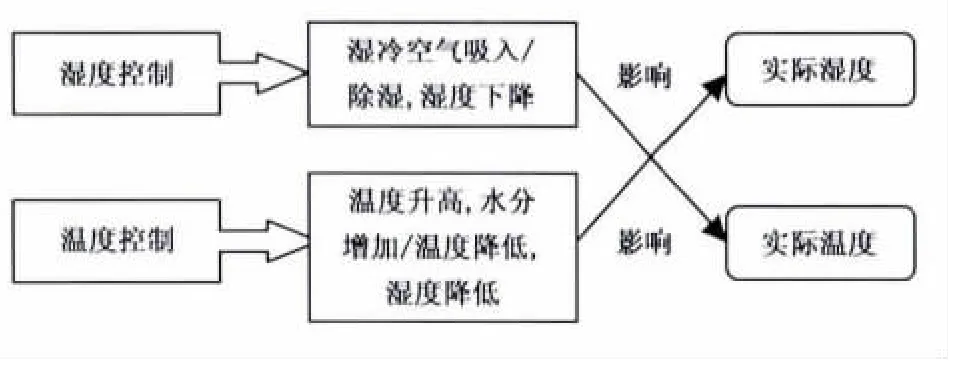
图2 温湿度变化模型 Fig.2 Temperature and humidity change model.
通过分析蚯蚓反应器温度和相对湿度控制的数学模型,发现具有比较大的延迟滞后特性。因此需要同时解决控制滞后性的问题,并达到精确性的要求。
根据蚯蚓反应器的温度和相对湿度调节动态系统的环境特点,假定系统温度和相对湿度随时间变化3个顺序状态。那些系统输出第k+1状态可以根据第k、k-1和k-2这三个顺序状态推算出。其函数关系如下:
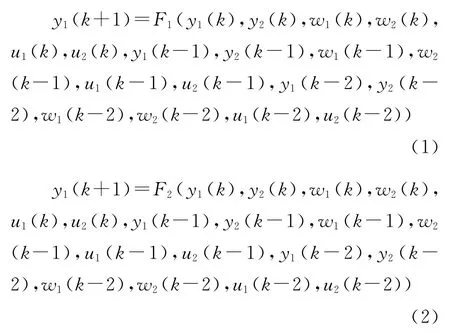
其中,F1、F2函数是支持向量机回归模型中的非线性函数。
所以,蚯蚓生物反应器的温度和相对湿度预测输出可以表达为:

其中,K 是核函数;v是SVM 的输入向量;vi,i=1,…,mj是SVM模型中的支持向量;mj是所需要的支持向量数量。aji和bj则是通过训练得到的常量。
这里需要为2个输出变量设计2个SVM模型。每个输出变量有独立的SVM模型,有自己独立的支持向量和相应的常量系数。向量v和vi是由采样时间k,k-1和k-2的状态变量y1和y2,输入变量u1和u2以及w1和w2综合组成。在这里,18个输入变量共同确定了式(1)和式(2)中的函数F1和F2的值。
如果使用高斯核函数,表达式(3)可以写成:

从式(1)和式(2)可以看出,函数F1和F2是共享了同一个输入向量v,这个输入向量有18个特征值。每个特征因素值将用于在SVM中的核函数。有一个需要注意的问题是,不同的特征元素有不同的值范围。在F1函数里,例如,第一个参数是温度范围为17~30℃,第二个参数是相对湿度在40%~99%范围内。每个参数的值可以通过误差的平方形式影响内核。如果一些元素原来的绝对值比其他大,那么最后他们将是主要影响核函数值的因素。所以在输入SVM模型前需要对原始数据进行预处理。这里把所有特征值和目标值都归化到[-1,1]范围。在SVM模型核函数中需要设置C和σ这两个参数。为方便起见,采用一个合成参数g=1/σ2来代替σ。这里采用k-遍交叉验证法确定核函数参数[12]。
1.3 MPC控制模型
MPC模型预测控制[15]自20世纪80年代以来一直是工业生产过程控制的先进方法。MPC模型预测控制器依赖于处理过程的动态模型,是最常见的获得系统辨识的线性经验模型。MPC的主要优点是允许在当前时隙进行优化,同时保持未来时隙。这是通过优化一个有限的时间范围只执行当前的时隙。MPC能够预测未来,可以采取相应的控制措施。传统的PID控制器是不具有预测能力的,而MPC是具有预测功能的数字控制器。
非线性模型被用于预测一系列控制动作最终对控制目标的效果。预测控制目的是要得出一组最佳的控制动作序列,也就是通过优化一些具体指标,使目标输出达到预定值。对于蚯蚓生物反应器温度和相对湿度系统的控制,目标函数和约束条件如下:
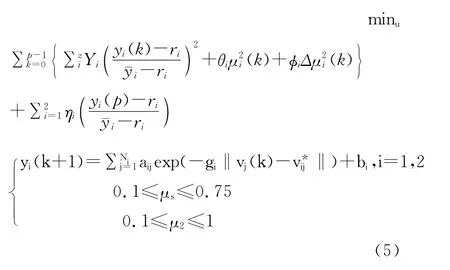
其中,yi、θi、φi、以及φi都是调节系数,调节各个因素的重要程度。
实验发现,这些不同因素的重要程度将会明显地影响控制效果。
2 实验结果
蚯蚓生物反应器温度和相对湿度MPC控制实验结果如图3和图4所示。控制过程中数据采集周期是每分钟一次,而记录的频率是6Hz,即控制信号是每分钟更新一次而温度和相对湿度则每10s记录1次。实验过程的初始条件是y1=27.3℃及y2=83%。初始设置目标是y1=24℃和y2=65%。在第295个记录点时状态变化为y1=23℃和y2=60%,到第487个记录点时状态变化为y1=22℃和y2=55%。参数设置具体如表1。
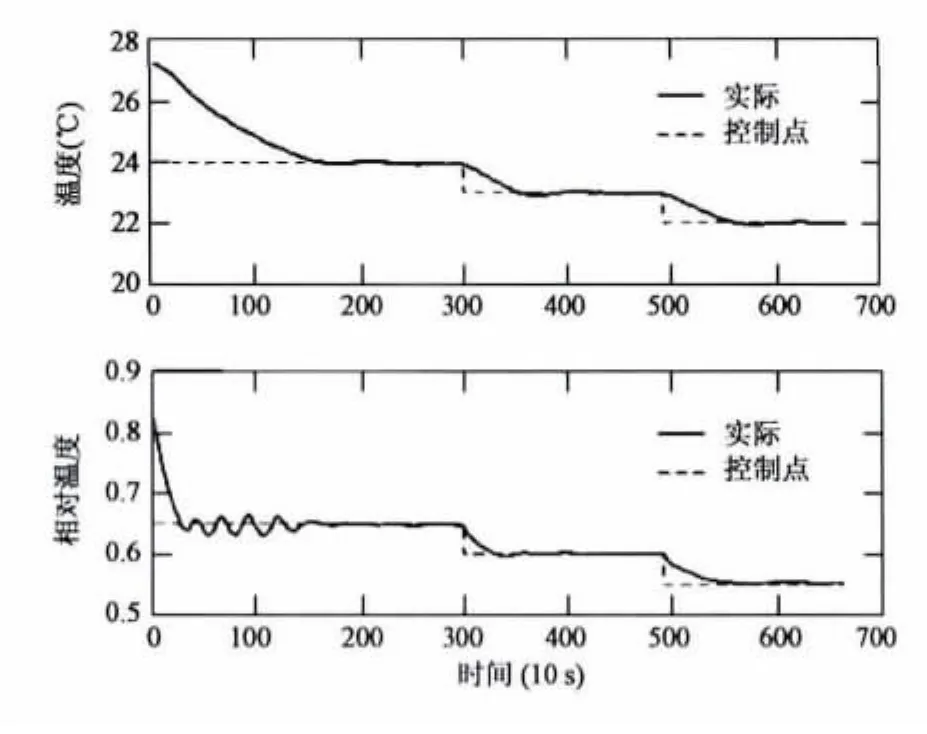
图3 MPC控制温度和湿度Fig.3 Temperature and humidity was controled by MPC.

表1 调试参数 Table 1 The parameters.
从图3中可以看到,气体温度和相对湿度在第150记录点时候第1次达到了设置的温度和相对湿度,也就是在第25min的时间。从图中可以看到相对湿度的动态变化速度明显比温度变化快。一旦相对湿度到达预设置的值,它将在设置值附近震荡摆动直到温度也到达设置值。在第295和第487记录点的两个设置值同时发生了变化,温度和相对湿度都同时发生变化。
3 讨论
在实际反应过程中,系统会表现出更大的振荡性,特别是在相对湿度变化过程中。出现这种现象的主要原因有两方面。首先,MPC是假定新进入的空气的温度和相对湿度在预测范围内保持不变,而事实上在该过程中,这些值都是变化的,并且随着周期的增长误差更加明显。第二,当预测水平提高后,所需的计算时间相应增加,因此可能导致在发送控制信号的时间产生延迟,特别是当采用运行速度相对慢的计算机时候,会更加明显地降低控制的性能。
总体来看,SVM是一种理想优化方法可以同时减少预测过程的错误和模型复杂度。因为具有近似计算处理能力,SVM可以被用于非线性处理的模型。对SVM模型的优化超参数选择是重要的步骤。实验证明MPC是一个有效稳定的控制方法。在系统控制范围内,实验过程显示温度和相对湿度都可以实现准确达到预定的设置值。

图4 MPC控制信号 Fig.4 Signal was controled by MPC.
[1] 杨敬辉,张松林.蚯蚓堆肥污泥研究述评[J].湖北农业科学,2011,50(9):1729-1730.
[2] 陈巧燕,杨 健,王志强,等.蚯蚓堆肥处理有机废弃物的国外研究进展[J].中国资源综合利用,2006,24(12):8-10.
[3] 刘顺会,陈大志,林秋奇,等.不同接种密度蚯蚓堆肥处理有机垃圾混合剩余污泥的比较研究[J].工业安全与环保,2012,(3):71-73.
[4] 陈大志,刘顺会,林秋奇,等.蚯蚓堆肥处理剩余污泥混合有机垃圾的效率研究[J].农业环境科学学报,2012,(6):1244-1249.
[5] 黄 雷,何 禹,杨 眉,等.蚯蚓堆肥的制作方法及堆肥装置的探讨[J].吉林农业,2012,(12):87.
[6] 刘 强,秦章伟,刘会成,等.城市污水厂污泥堆肥技术研究进展[J].井冈山学院学报:自然科学版,2008,29(6):47-48.
[7] 蔡永铭,周文彬,谷凌雁.数字蚯蚓生物反应器处理城市污泥[J].长春工业大学学报:自然科学版,2013,(4):477-480.
[8] Garg P,Gupta A,Satya S.Vermicomposting of different types of waste using Eisenia foetida:a comparative study[J].Bioresource Technol.,2006,97:391-395.
[9] Arguello-Serrano B,Velez-Reyes M.Nonlinear control of a heating,ventilating,and air conditioning system with thermal load estimation[J].IEEE Trans.Contr Syst.Technol.,1999,7(1):56-63.
[10] 彭勇刚,韦 巍.基于神经网络补偿的人工气候箱温湿度模糊控制[J].仪器仪表学报,2009,30(7):1373-1377.
[11] Khalid M,Omatu S,Yusof R.Temperature regulation with neural networks and alternative schemes[J].IEEE Trans.Neur.Netw.,1995,6(3):572-582.
[12] 张雪平,王志斌.基于模糊控制的PLC在温度控制中的应用[J].电气传动,2005,(35)8:54-59.
[13] Thompson R,Dexter A.A fuzzy decision-making approach to temperature control in in air-conditioning systems[J].Control Engin.Prac.,2005,13(6):689-698.
[14] Vapnik V.The Nature of Statistical Learning Theory[M].New York:Springer,1995.
[15] Camacho E F,Bordons C.Model Predictive Control[M].London:Springer,1999.
猜你喜欢
云南化工(2021年11期)2022-01-12 06:06:36
作文小学中年级(2018年5期)2018-06-11 01:16:12
环境保护与循环经济(2017年4期)2018-01-22 03:27:11
中国铸造装备与技术(2017年6期)2018-01-22 01:50:01
小学生导刊(2017年19期)2017-07-19 13:41:50
快乐语文(2017年9期)2017-06-15 20:28:36
山东工业技术(2016年15期)2016-12-01 05:30:54
工业设计(2016年4期)2016-05-04 04:00:29
现代商贸工业(2016年35期)2016-04-09 06:59:58
专用汽车(2016年9期)2016-03-01 04:17:30